相机校准和3D重建12-SLAM之相机标定
针孔相机模型
小孔模型能够把三维世界中的物体投影到一个二维成像平面。同理,可以用这个简单的模型来解释相机的成像模型。如下图所示
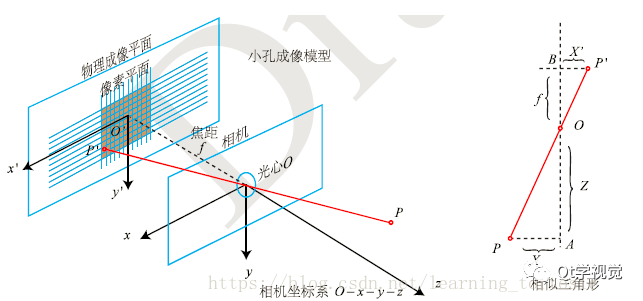
对这个简单的针孔模型进行几何建模
设O-X-Y-Z为相机坐标系,习惯上让z轴指向相机前方,xxx向右,yyy向下。OOO为摄像机的光心,也是针孔模型中的针孔。现实世界的空间点PPP,经过小孔OOO投影之后,落在物理成像平面O'-X'-Y'-Z'上,成像点位P',设PPP的坐标为[X,Y,Z],P'为[X',Y',Z'],并且设物理成像平面到小孔的距离为fff(焦距)。那么,根据三角形相似关系,有:
其中负号表示成的像是倒立的。为了简化模型,可以将成像平面对称到相机前方,和三维空间点一起放在摄像机坐标系的同一侧,如图4-2中间的样子所示。这样可以把公式中的负号去掉,使式子更加简洁: