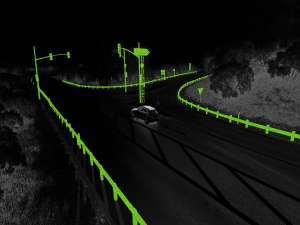
检测点云中的目标(ROS2 & Tao-PointPillars) 准确、快速的目标检测是机器人导航和避障中的一项重要任务。 自主代理需要清晰的周围环境地图才能导航到目...

✅作者简介:大家好我是@每天都要敲代码,一位材料转码农的选手,希望一起努力,一起进步! 📃个人主页:@每天都要敲代码的个人主页 🔥系列专...
✅作者简介:热爱后端语言的大学生,CSDN内容合伙人 ✨精品专栏:C++面向对象 🔥系列专栏:JavaSE精品总结 文章目录 前言 1、设计模式概念及分类 ...

写在前面 Service 是⼀种抽象的对象, 它定义了⼀组 Pod 的逻辑集合和⼀个⽤于访问它们的策略,其实这个概念和微服务⾮常类似。⼀ 个 Serivce 下⾯包含的 P...

简短的列表可以通过定向布局实现,但是如果列表项非常多,那么使用定向布局就不合适了。与许多其他的移动开发技术一样,鸿蒙操作系统也提供了可复用列表...

CSDN话题挑战赛第2期 参赛话题:面试宝典 文章目录 前言 1、常用类(Object)概述 2、五种常用方法与部分方法重写示例 3、逻辑运算符==与equals的比较 ...

现在,我们已经完成了关于测量图像中对象的大小和计算对象之间的距离的三部分系列的最后一部分。 两周前,我们通过学习如何(正确地)使用 Python 和 OpenCV...
大家好! 我是深圳技术大学FSR实验室的同学,在OpenHarmony成长计划啃论文俱乐部里,与华为、软通动力、润和软件、拓维信息、深开鸿等公司一起,学习和研究...

accept 创建新 socket 我们直接从服务器端的 accept 讲起。当 accept 之后,进程会创建一个新的 socket 出来,专门用于和对应的客户端通信,然后把它放到当...