Apollo规划决策算法仿真调试(3):ReferenceLineProvider参考线生成流程
前言:
在Apollo规划决策算法中,即planning模块中,参考线ReferenceLine 的作用至关重要,ReferenceLine 是整个规划算法的基础,规划的目的就是使车辆按照ReferenceLine行驶。
目前关于ReferenceLine 的平滑方法介绍很多,但很少介绍ReferenceLine 在整个apollo的planning模块中,是在哪一步进行生成,它的整个运行机制与流程是怎样的。
本文将使用vscode与dreamview 联合调试的方法,来展示ReferenceLine 在apollo的planning模块中是如何一步步生成。
如果对Apollo规划决策算法仿真调试感兴趣,想了解规划算法的实施细节,可以持续关注系列文章:
Apollo规划决策算法仿真调试(1): 使用Vscode断点调试apollo的方法
Apollo规划决策算法仿真调试(2):使用bazel 编译自定义代码模块
Apollo规划决策算法仿真调试(4): 动态障碍物绕行
正文如下:
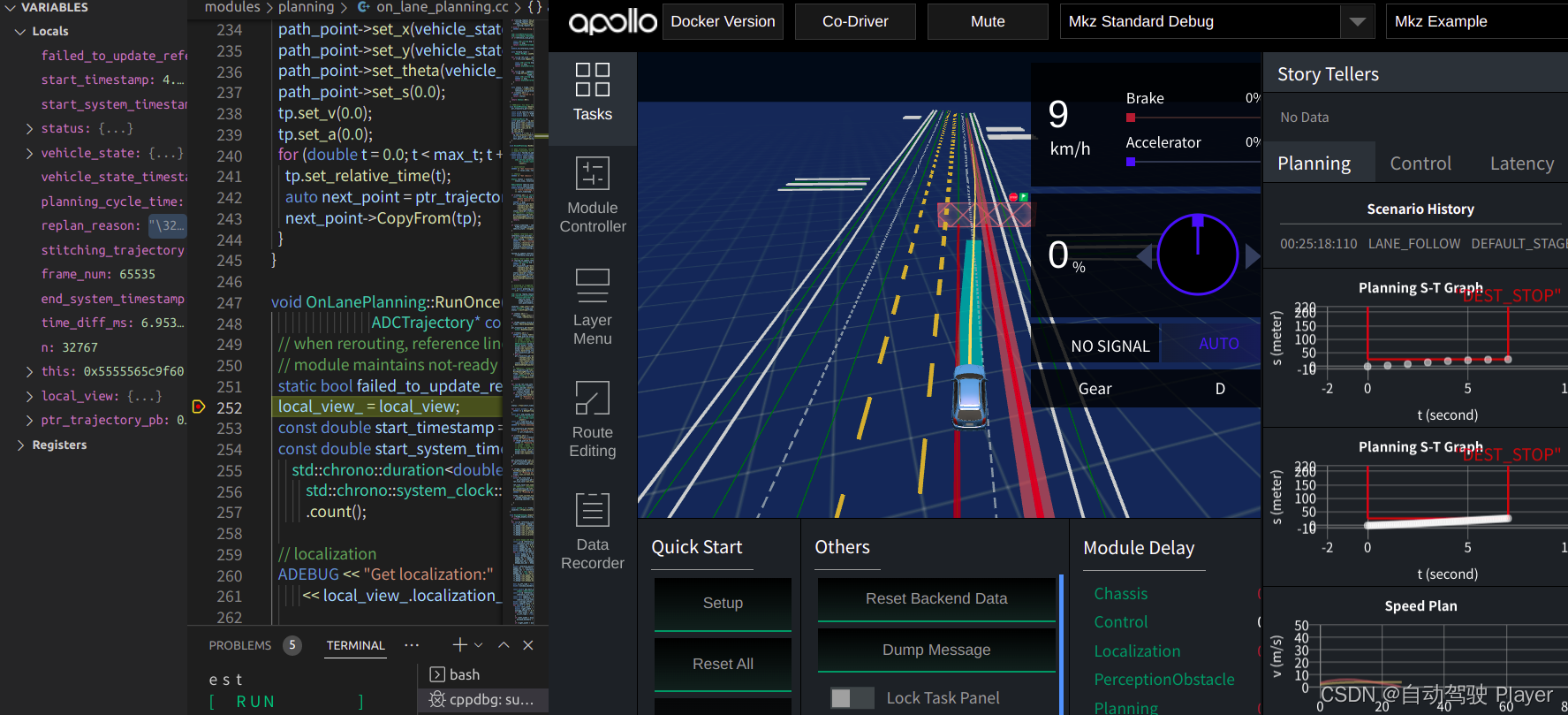
1、Apollo在onlanePlanning中进行ReferenceLine 的生成,整体的调度过程如下:
下图是一次调试时vscode中堆栈区的截图,可以看到在planning模块中,参考线ReferenceLine 的生成路径如下:
OnLanePlanning::RunOnce( ) -->> InitFrame(frame_num, stitching_trajectory.back(), vehicle_state) -->>
GetReferenceLines(&reference_lines, &segments)) -->> CreateReferenceLine(reference_lines, segments) -->>
CreateRouteSegments(vehicle_state, segments) -->> GetRouteSegments(vehicle_state, segments) ......
从本文后续的代码分析可以看出,RouteSegments 对于参考线ReferenceLine 的生成至关重要,有几个RouteSegments 决定有几条参考线的生成。

2、OnLanePlanning::RunOnce( ) 是执行规划认为的主函数,在调用具体的规划器planner进行轨迹规划任务前,会首先初始化frame,其中在初始化frame时,进行了参考线的调用,即GetReferenceLines()。
OnLanePlanning::RunOnce( ) 中 InitFrame( ) 的相关代码:
injector_->ego_info()->Update(stitching_trajectory.back(), vehicle_state); const uint32_t frame_num = static_cast(seq_num_++); status = InitFrame(frame_num, stitching_trajectory.back(), vehicle_state); if (status.ok()) { injector_->ego_info()->CalculateFrontObstacleClearDistance( frame_->obstacles()); }在 InitFrame( ) 中 GetReferenceLines( )的相关代码如下:
std::list reference_lines; std::list segments; if (!reference_line_provider_->GetReferenceLines(&reference_lines, &segments)) { const std::string msg = "Failed to create reference line"; AERROR << msg; return Status(ErrorCode::PLANNING_ERROR, msg); }3、ReferenceLineProvider 中获取参考线ReferenceLine:
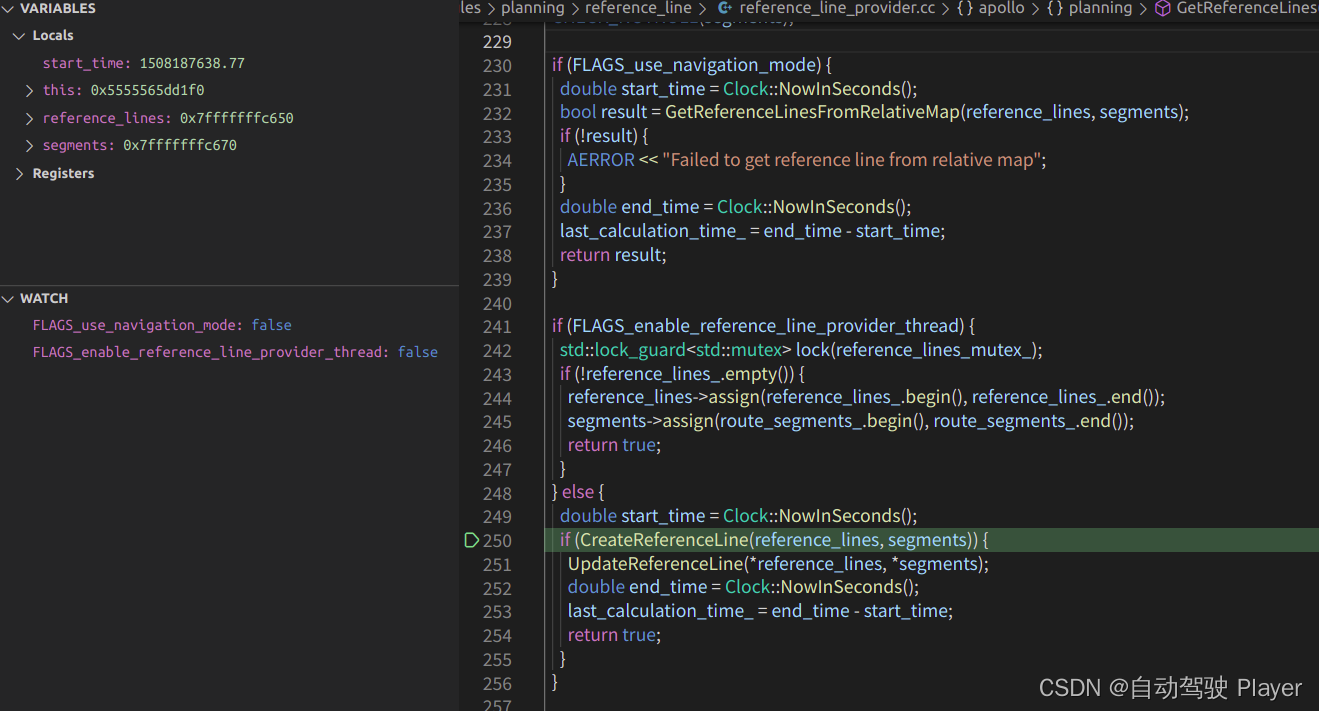
从调试过程中变量分析,在GetReferenceLines(&reference_lines, &segments)) 中,主要是调用CreateReferenceLine(reference_lines, segments) 来生成参考线,二者都属于ReferenceLineProvider 类中的方法。
调试过程中,关键变量取值如下:
代码如下:
bool ReferenceLineProvider::GetReferenceLines( std::list *reference_lines, std::list *segments) { CHECK_NOTNULL(reference_lines); CHECK_NOTNULL(segments); if (FLAGS_use_navigation_mode) { double start_time = Clock::NowInSeconds(); bool result = GetReferenceLinesFromRelativeMap(reference_lines, segments); if (!result) { AERROR << "Failed to get reference line from relative map"; } double end_time = Clock::NowInSeconds(); last_calculation_time_ = end_time - start_time; return result; } if (FLAGS_enable_reference_line_provider_thread) { std::lock_guard lock(reference_lines_mutex_); if (!reference_lines_.empty()) { reference_lines->assign(reference_lines_.begin(), reference_lines_.end()); segments->assign(route_segments_.begin(), route_segments_.end()); return true; } } else { double start_time = Clock::NowInSeconds(); if (CreateReferenceLine(reference_lines, segments)) { UpdateReferenceLine(*reference_lines, *segments); double end_time = Clock::NowInSeconds(); last_calculation_time_ = end_time - start_time; return true; } } AWARN << "Reference line is NOT ready."; if (reference_line_history_.empty()) { AERROR <assign(reference_line_history_.back().begin(), reference_line_history_.back().end()); segments->assign(route_segments_history_.back().begin(), route_segments_history_.back().end()); AWARN << "Use reference line from history!"; return true;}4、GetReferenceLines( ) 中参考线ReferenceLine 的生成逻辑
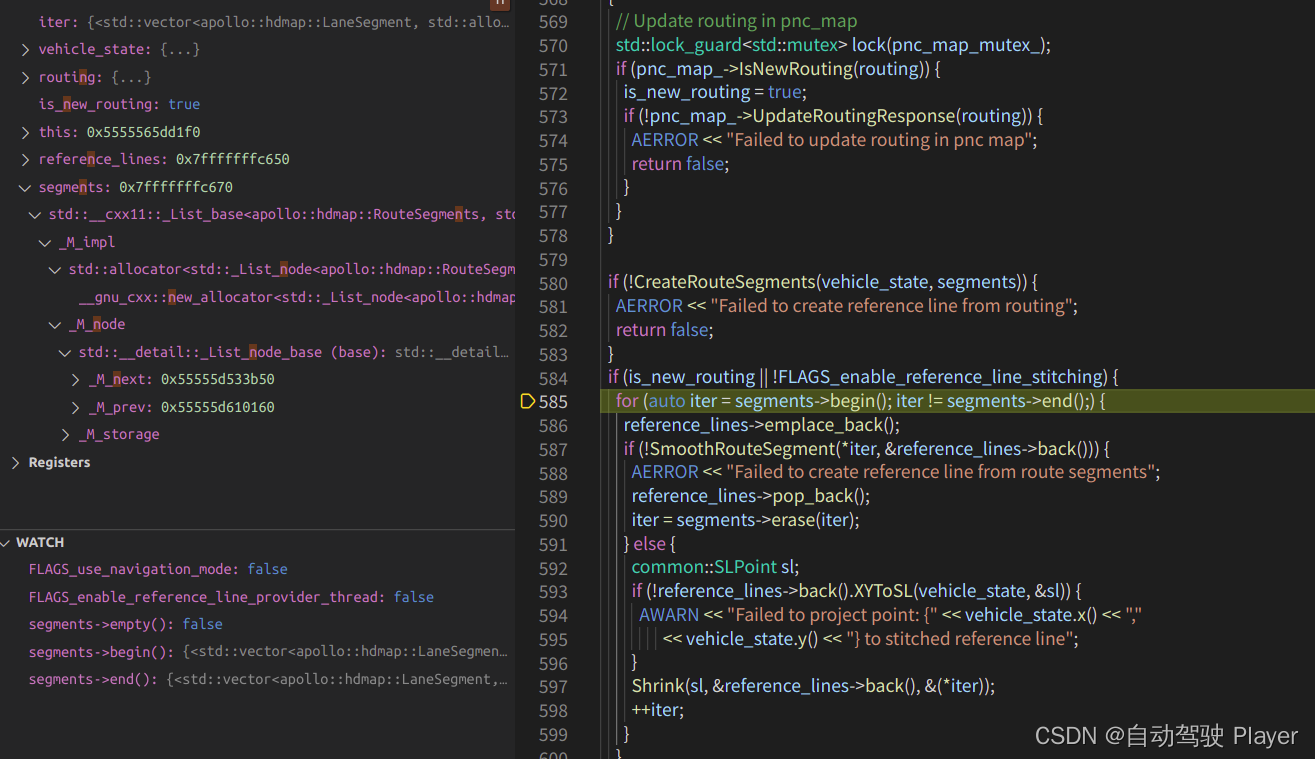
在GetReferenceLines( ) 中可以看到 ReferenceLine 是通过遍历segments 来进行生成的,所以segment 的数量以及位置,便决定了参考线ReferenceLine 的数量与位置;对于每个segments ,通过调用参考线平滑方法SmoothRouteSegment(*iter, &reference_lines->back()) 来生成参考线。
if (!CreateRouteSegments(vehicle_state, segments)) { AERROR <begin(); iter != segments->end();) { reference_lines->emplace_back(); if (!SmoothRouteSegment(*iter, &reference_lines->back())) { AERROR <pop_back(); iter = segments->erase(iter); } else { common::SLPoint sl; if (!reference_lines->back().XYToSL(vehicle_state, &sl)) { AWARN << "Failed to project point: {" << vehicle_state.x() << "," << vehicle_state.y() <back(), &(*iter)); ++iter; } } return true;5、ReferenceLineProvider::CreateRouteSegments()逻辑
可以看到对于参考线至关重要的RouteSegments,是根据地图提供的pnc_map 来进行生成,其中又可以通过配置FLAGS_prioritize_change_lane 来确定是否变道优先。
代码如下:
bool ReferenceLineProvider::CreateRouteSegments( const common::VehicleState &vehicle_state, std::list *segments) { { std::lock_guard lock(pnc_map_mutex_); if (!pnc_map_->GetRouteSegments(vehicle_state, segments)) { AERROR <empty();}6、从调试结果中看到,生成了两个RouteSegments,所以也会生成两条参考线
7、关于RouteSegments 生成的具体方法,将在之后的文章中进行介绍。

