强化学习之SARSA
目录
- 1. 准备内容
-
- 1.1 基于动态规划(DP)方法的强化学习
-
- 介绍
- 动态规划方法(DP)的局限性:
- 1.2 基于蒙特卡洛(MC)方法的强化学习
-
- 介绍
- 蒙特卡洛(MC)方法的局限性:
- 2. 基于MC的增量更新方式
-
- 2.1 增量更新和全量更新
- 2.2 基于MC的全量更新方法和增量更新方法
- 2.3 基于MC的增量更新方法的局限性
- 3. 时序差分方法(Temporal Difference,TD)
- 4. SARSA
-
- 4.1 SARSA作用公式
- 4.2 SARSA算法的执行过程
- 5.从代码角度认识SARSA
1. 准备内容
1.1 基于动态规划(DP)方法的强化学习
介绍
动态规划(DP)方法主要包含2个步骤:
- 策略评估
即给定任意一个策略π ( a ∣ s ) \pi(a \mid s) π(a∣s)计算出对应的状态价值函数 Vπ ( s ) V_\pi(s) Vπ(s)或状态-动作价值函数 qπ ( s , a ) q_\pi(s,a) qπ(s,a) - 策略改进(策略迭代)
针对策略评估得到的价值函数 Vπ ( s ) V_\pi(s) Vπ(s)、 qπ ( s , a ) q_\pi(s,a) qπ(s,a)使用贪心策略选择最优价值函数对应的策略 π′ \pi^\prime π′,对上一时间点的策略π \pi π进行迭代更新;
DP方法的迭代思路是贝尔曼期望方程:
V k + 1 ( s ) = ∑ a ∈ Aπ(a∣s) ∑ s ′ , r p ( s ′, r ∣ s , a ) [ R t + 1 + γ V k( s ′) ]V_{k+1}(s)=\displaystyle\sum_{a\in A}\pi(a \mid s) \displaystyle\sum_{s^\prime,r}p(s^\prime,r\mid s,a)[R_{t+1}+\gamma V_k(s^\prime)] Vk+1(s)=a∈A∑π(a∣s)s′,r∑p(s′,r∣s,a)[Rt+1+γVk(s′)]
贝尔曼期望方程本身属于不动点方程,满足不动点定理特性,根据不动点定理,(已被证明)该方程在迭代过程种产生的一系列结果 V ( S ) = [ V 1 ( s ) , V 2 ( s ) , . . . , V k ( s ) , Vk+1 ( s ) , . . . ] V(S)=[V_1(s),V_2(s),...,V_k(s),V_{k+1}(s),...] V(S)=[V1(s),V2(s),...,Vk(s),Vk+1(s),...]必然会收敛到最优解。
动态规划方法(DP)的局限性:
如果要使用DP方法进行策略改进,必要要提前知道动态特性函数 P ( s ′ , r ∣ s , a ) P(s^\prime,r \mid s,a) P(s′,r∣s,a)的具体结果,否则无法进行迭代计算;
1.2 基于蒙特卡洛(MC)方法的强化学习
介绍
MC的底层逻辑:大数定律
核心:通过对 G t G_t Gt进行采样取均值以对某状态 s s s在策略 π \pi π的状态价值函数 V π ( s ) V_\pi(s) Vπ(s)进行近似;
G t G_t Gt的计算公式如下:
Gt =R t + 1 + γR t + 2 +γ2 R T + 3 + . . . +γ T − 1 R t + TG_t = R_{t+1} + \gamma R_{t+2} + \gamma^2R_{T+3} + ... + \gamma^{T-1}R_{t+T} Gt=Rt+1+γRt+2+γ2RT+3+...+γT−1Rt+T
数学符号表达:
Vπ ( s ) =Eπ [Gt ∣St = s ] ≈1N ∑ i = 1NG t ( i ) V_\pi(s)=E_\pi[G_t \mid S_t=s] \approx\dfrac{1}{N}\displaystyle\sum_{i=1}^NG_t^{(i)} Vπ(s)=Eπ[Gt∣St=s]≈N1i=1∑NGt(i)
蒙特卡洛(MC)方法的局限性:
对 G t G_t Gt采样的过程中,样本必须在一幕(从 t t t时刻开始, T T T时刻结束)全部执行结束的状态下,才能获取 Rt+1 , Rt+2 , . . . , Rt+T R_{t+1},R_{t+2},...,R_{t+T} Rt+1,Rt+2,...,Rt+T的具体结果,并最终获得1个 G t G_t Gt结果;最终需要获取足够量的 G t G_t Gt结果才能够执行均值操作,整个过程绝大部分时间浪费在了采样过程,时间利用率极低;
2. 基于MC的增量更新方式
2.1 增量更新和全量更新
以取均值为例:
已知一个数列中包含3个数值: [ 3 , 4 , 5 ] [3,4,5] [3,4,5]
使用全量更新的方法进行均值操作返回的结果:
3 + 4 + 5 3 = 4 \dfrac{3 + 4 + 5}{3} = 4 33+4+5=4
使用增量更新的方法进行均值操作返回的结果:
3 + 4 2+ 5 2 = 4.25 \dfrac{\dfrac{3 + 4}{2} + 5}{2} = 4.25 223+4+5=4.25
2.2 基于MC的全量更新方法和增量更新方法
基于MC的增量更新方法作用公式如下:
V (St ) ← V (St ) + α (Gt − V (St ) ) ) V(S_t) \gets V(S_t) + \alpha(G_t - V(S_t))) V(St)←V(St)+α(Gt−V(St)))
解释:
全量更新方法相当于常规蒙特卡洛方法(MC)的学习方式:
若想要得到当前状态下的状态价值函数 V π ( s ) V_\pi(s) Vπ(s)的近似结果 -> 需要采样采出若干个 G t G_t Gt结果 -> 需要执行完若干个幕再执行均值操作才能实现(MC方法时间利用率低的局限性)
增量更新的方式:
每加入一个 G t G_t Gt样本,就执行一次更新 -> 即便和真正的均值存在差异,但更新时间更短,更容易观察到收敛结果;
2.3 基于MC的增量更新方法的局限性
相比于常规MC全量更新的更新方法,增量更新方法有效提高了时间的利用率。但实际应用中,走1幕 -> 得到1个 G t G_t Gt -> 更新1次 V ( S t ) V(S_t) V(St)这种更新方法的时间利用率仍然较低,希望能够找到比1个 G t G_t Gt更小的单位对 V ( S t ) V(S_t) V(St)进行更新。
3. 时序差分方法(Temporal Difference,TD)
时序差分作用公式:
V (St ) ← V (St ) + α (R t + 1 + γ V (S t + 1 ) − V (St ) ) ) V(S_t) \gets V(S_t) + \alpha(R_{t+1} + \gamma V(S_{t+1}) - V(S_t))) V(St)←V(St)+α(Rt+1+γV(St+1)−V(St)))
和基于MC的增量更新方法相比,TD方法将 G t G_t Gt用贝尔曼期望方程的方式展开了;
这种方法的优势在于,相比于MC的增量方法,不需要将整个一幕走完,而是只需走一步( S t → St+1 S_t \to S_{t+1} St→St+1)即可执行一次状态价值函数 V ( S t ) V(S_t) V(St)进行迭代。
该方法本质上将蒙特卡洛方法(MC)和动态规划方法(DP)相结合的思路
- DP角度:该方法仍然是一个”自举“(Boostrapping)过程。
- 根据上个时间点状态的价值函数V (S t − 1 ) V(S_{t-1}) V(St−1)的结果更新本时间点状态的价值函数信息V (St ) V(S_t) V(St);
- 同理,下个时间点状态的价值函数结果V (S t + 1 ) V(S_{t+1}) V(St+1)依赖本时间点状态的价值函数信息V (St ) V(S_t) V(St);
- 时序差分方法的作用公式仍然是不动点方程。根据不动点定理,在迭代过程中所有状态对应的价值函数V (S ( 1 ) ) V(S^{(1)}) V(S(1)),V (S ( 2 ) ) V(S^{(2)}) V(S(2)),…,V (S ( m ) ) V(S^{(m)}) V(S(m))(m表示状态的数量,有多少种状态)都能收敛到最优结果。
- MC角度:在步骤1参与迭代更新的过程中仍然在采样,只是之前MC方法采样的是 Gt G_t Gt,现在只是采样 R t + 1R_{t+1} Rt+1,V (S t + 1 ) V(S_{t+1}) V(St+1)。
上述过程中需要有行为(Action)的参与才能够执行策略改进;
接下来引入SARSA方法 -> 使用基于同轨方式的时序差分进行策略改进;
4. SARSA
4.1 SARSA作用公式
SARSA作用公式:
Q (St ,At ) ← Q (St ,At ) + α (R t + 1 + γ Q (S t + 1 ,A t + 1 ) − Q (St ,At ) ) Q(S_t,A_t) \gets Q(S_t,A_t) + \alpha (R_{t+1} + \gamma Q(S_{t+1},A_{t+1}) - Q(S_t,A_t)) Q(St,At)←Q(St,At)+α(Rt+1+γQ(St+1,At+1)−Q(St,At))
该公式相比于时序差分的作用公式 -> 只是将 V ( S t ) → Q ( S t , A t ) V(S_t) \to Q(S_t,A_t) V(St)→Q(St,At),但它的执行过程存在一些区别:
4.2 SARSA算法的执行过程
由于SARSA是基于同轨策略的时序差分控制 -> 需要行为策略必须是软策略
软策略 -> 当某行为 a a a在当前状态s s s有意义的前提下,该行为发生的概率 >0恒成立,即该行为必然存在概率会发生。
数学符号表达:
a ∈ A ( s ) → π ( a ∣ s ) > 0 a \in A(s) \to \pi(a \mid s)>0 a∈A(s)→π(a∣s)>0
具体执行过程如下:
- 使用ϵ \epsilon ϵ-贪心方法(针对软策略π ( a ∣ s ) \pi(a \mid s) π(a∣s))在 St S_t St状态下从满足条件的行为集合中选择一个行为 At A_t At ;
- 选择完 At A_t At后,执行 At A_t At,系统必然将状态从 St S_t St状态更新到 S t + 1S_{t+1} St+1状态,并得到回馈结果 R t + 1R_{t+1} Rt+1;
- 再次使用策略π ( a ∣ s ) \pi(a \mid s) π(a∣s)在 S t + 1S_{t+1} St+1状态下选择动作 A t + 1A_{t+1} At+1(该动作的选择方式同样是ϵ \epsilon ϵ-贪心方法),但不执行;而是通过 A t + 1A_{t+1} At+1和 S t + 1S_{t+1} St+1计算Q (S t + 1 ,A t + 1 ) Q(S_{t+1},A_{t+1}) Q(St+1,At+1);
- 将3中的结果对Q (St ,At ) Q(S_t,A_t) Q(St,At)进行迭代: Q( S t , A t )←Q( S t , A t )+α( R t + 1+γQ( S t + 1, A t + 1)−Q( S t , A t )) Q(S_t,A_t) \gets Q(S_t,A_t) + \alpha (R_{t+1} + \gamma Q(S_{t+1},A_{t+1}) - Q(S_t,A_t))Q(St,At)←Q(St,At)+α(Rt+1+γQ(St+1,At+1)−Q(St,At))
- 将更新完的Q (St ,At ) Q(S_t,A_t) Q(St,At)中选出一个最优Action -> A∗ A^* A∗,使得: A∗ = a r g m a x a Q (St ,At ) ⟺ Q (St ,A∗ ) = m a x Q (St ,At ) A^*= \underset {a}{argmax}Q(S_t,A_t)\iff Q(S_t,A^*)=maxQ(S_t,A_t) A∗=aargmaxQ(St,At)⟺Q(St,A∗)=maxQ(St,At)
- 最后将 A∗ A^* A∗使用ϵ \epsilon ϵ-贪心方法对π ( a ∣ s ) \pi(a \mid s) π(a∣s)进行迭代,算法结束;
注意:上述步骤只是更新了t时刻的状态St下各行为对应的概率分布,其他状态行为的概率分布没有变化;
执行过程分析:
- π ( a ∣ s ) \pi(a \mid s) π(a∣s)是如何更新的;
通过Q (St ,A∗ ) Q(S_t,A^*) Q(St,A∗)获取最大值的行为 A∗ A^* A∗通过ϵ \epsilon ϵ-贪心方法对 π ( a ∣ s ) \pi(a \mid s) π(a∣s)进行迭代(程序开始时需要出始化 π ( a ∣ s ) \pi(a \mid s) π(a∣s)) - 状态-动作价值函数是1个2维表格( Q t a b l eQ_{table} Qtable) -> 每走一步,状态-动作价值函数和策略均会更新一次;
5.从代码角度认识SARSA
代码链接
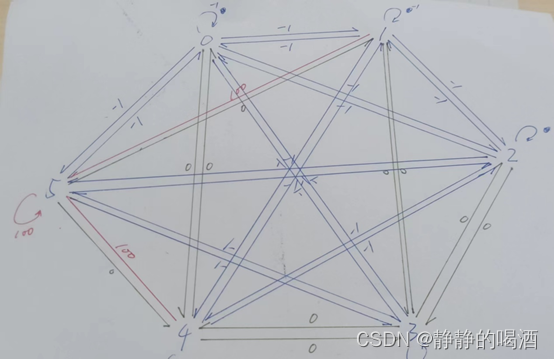
具体了解一下代码任务 -> 机器人在不同位置下的路径选择问题;
共包含6个位置点(6种State)(离散型随机变量) -> 0,1,2,3,4,5;
共包含6种行为(Action)(离散型随机变量) -> 0,1,2,3,4,5(朝着0,1,2,3,4,5位置去)
回馈(Reward)(离散型随机变量) -> 三种情况[-1,0,100]
不同回馈情况表示的信息如下:
-1 表示2个位置之间没有通路;
0 表示2个位置之间存在通路;
100 表示2个位置之间存在通路,并指向终点;
将回馈矩阵进行绘图,如下图所示:
绿色线表示回馈 -> 0
红色线表示回馈 -> 100
蓝色线表示回馈 -> -1
任务是在不同的位置点 -> 走向终点的路径
代码及代码分析如下:
import numpy as npimport random# get Q_table:# 创建并初始化Q_tableQ_table = np.zeros((6,6))Q_table = np.matrix(Q_table)# get reward_table:# 创建回馈矩阵(6*6)r = np.array([[-1, -1, -1, -1, 0, -1], [-1, -1, -1, 0, -1, 100], [-1, -1, -1, 0, -1, -1], [-1, 0, 0, -1, 0, -1], [0, -1, -1, 0, -1, 100], [-1, 0, -1, -1, 0, 100]])r = np.matrix(r)#Q(S_t,A_t )←Q(S_t,A_t )+α(R_(t+1)+γQ(S_(t+1),A_(t+1) )-Q(S_t,A_t ))# γ超参数-> 增量更新的变化量;gamma = 0.8# train_opera:for i in range(2000): # 随机选取其中一个位置(状态): state = random.randint(0,5) if state == 5: # print("The robot is at the end..") pass # 随机到5状态意味着直接到达终点,没有任何操作必要; while state != 5: # 注意该位置 -> 并不是所有的行为Action在该状态的策略中,需要将无效行为剔除(回馈结果=-1的行为属于无效行为),将剩余满足条件行为使用软策略; actions = [] for a in range(6): if r[state,a] >= 0: actions.append(a)# 由于该示例比较简单,并没有使用ε-贪心方法,而是直接将选择概率平均分给所有满足条件的行为;# random.randint -> 服从概率均匀分布策略; action = actions[random.randint(0,len(actions) - 1)] R = r[state,action] # 根据上述选择得到的行为Action -> 从之前的位置走到当前位置; next_state = action# 重复之前的动作-> 剔除无效行为; actions = [] for a in range(6): if r[next_state,a] >= 0: actions.append(a)# 核心操作 -> 依旧使用random.randint概率平均策略(同轨策略)# 该策略和第一次选择Action时的策略完全相同 next_action = actions[random.randint(0,len(actions) - 1)]# 执行SARSA迭代公式 Q_table[state,action] = R + gamma * Q_table[next_state,next_action]# 更新状态 state = next_state # 更新行为 action = next_action print(Q_table) print("---" * 30) # test_opera: for i in range(20): # print("第{}次验证".format(i + 1)) state = random.randint(0,5) # print("机器人处于{}状态".format(state)) count = 0 while state != 5: if count > 20: # print("fail") break # 选择最大的Q: q_max = Q_table[state].max() q_max_action = [] for action in range(6): if Q_table[state,action] == q_max: q_max_action.append(action) next_state = q_max_action[random.randint(0,len(q_max_action) - 1)] # print("机器人将去{}状态".format(str(next_state))) state = next_state count += 1需要注意的点:
该代码中不存在策略更新的部分 -> random.randint在没有其他参数的情况下,就是概率平均分布并从中随机选择一个行为,无论怎么迭代都不会发生变化。

