Far planner 代码系列(18)
TerrainCallBack详解(2)
上回讲到更新temp_obs_ptr和temp_free_ptr ,我们接着往下讲。接着就用到了ExtractNewObsPointCloud函数去更新抽取NewObsPointCloud
函数把temp_obs_ptr_和surround_obs_cloud_输入,把surround_obs_cloud_作为一个参考点列,把其intensity设置为255。temp_obs_ptr_的intensity设为0 然后把这两个都并到一起,得到一个temp_new_cloud 。对temp_new_cloud进行下采样,减少点云的数量,其中intensity也会变化。具体咋变,我也不是很清楚。
根据采样完的temp_new_cloud,我们把每个点提取出来进行判断,判断它的intensity是否小于2,如果小于2,那就往cur_new_cloud里push这个点。
完事以后得到cur_new_cloud
这个结束以后,接着往下走。函数GetSurroundFreeCloud执行,把之前的surround_free_cloud_清空,然后从neighbor_free_indices_重新更新surround_free_cloud_


更新完成后,还要更新TerrainHeightGrid
这个TerrainHeightGrid保存的是一个固定大小的可通行区域。它会随着机器人的移动而改变。但是尺寸一直都是固定的。应该是89*89*1 也就是范围为89*89 高度为1.
而surround_obs_grid和surround_free_grid它们的范围都是200*200*125。如下图展示的分别为free和obs


言归正传,图看够了,我们就来看UpdateTerrainHeightGrid的代码部分。

上半部分的代码主要就是把 surround_free_cloud拷贝一份,复制到copy_free_ptr里。接着把copy_free_ptr通过一次滤波。其滤波的filter大小为terrain_height_grid_->GetResolution(),根据yaml文件可以换算一下就是(0.8,0.8,0.15)。然后往terrain_grid_occupy_list_填0 这个list的大小为7921。
接着就是一顿循环。我们把copy_free_ptr里的点挨个取出来,注意到它变成csub的时候,只用到了点的x和y坐标,z坐标为0。然后作者用了一个Expansion2D函数把csub扩大了一圈。当INFLATE_N为1的时候,从一个点扩展到九个点。

然后我们再把这subs里的每一个sub都取出来,如果当前sub不在terrain_height_grid_的range里,那就什么都不做,取下一个sub继续判断。
如果sub在terrain_height_grid_里,那就把它转成terrain_height_grid_下的ind,如果这些点对应的ind在terrain_grid_occupy_list_[ind]里是0的话,那就是首次扫描到这个点,把这个ind对应的cell给resize成1,并把当前的z坐标push进cell的第一个位置。
如果这些点对应的ind在terrain_grid_occupy_list_[ind]里是1的话,那就接着往cell里push它的z坐标。注意 这个是原始的point点的z坐标。它不是0,只有csub才是拿z=0生成的。最后terrain_grid_occupy_list_[ind]里把0变为1 ind对应的地方为0:不能通行(有障碍物),为1:可以通行(无障碍物)【因为传入的点都是从surround_free_cloud来的】
接着,根据terrain_grid_occupy_list_来得到terrain_grid_traverse_list_
这个函数的内容非常长。我们一步步来看

首先根据robot_pos的x和y坐标(z坐标设为0了)得到一个terrain_height_grid_下的robot_sub点。然后把terrain_height_ptr_清空。并判断robot_sub在不在范围内。
给terrain_grid_traverse_list_填充0,这个terrain_grid_traverse_list_的大小和terrain_grid_occupy_list_的大小是一致的。
auto IsTraversableNeighbor = [&] (const int& cur_id, const int& ref_id) 这是一个lambda匿名函数。待会会用到。它的作用就是:
放入ref_id,判断terrain_grid_occupy_list_[ref_id]是否为0,如果为0就代表ref_id这个点是障碍物,就不处理。如果不是障碍物,就把terrain_height_grid_里的cur_id对应cell存的第一个z值读出来给cur_h赋值。然后我们把terrain_height_grid_里的ref_id对应cell存的每一个z值都取出来,做一个小循环,把ref_id对应的每个z值与cur_h差值小于H_THRED的值都累加起来,当然counter也++。
如果counter大于0,我们就把ref_id对应的cell给resize成1,并且把它的均值放到里面。并且返回true,如果counter为0,那说明ref_id里的每个z值与cur_h的值的差值都超过了H_THRED,就返回false。

我是这么理解的:cur代表现在的点的位置,ref代表参考点的位置,如果两者的高度差的绝对值在H_THRED内,那说明这两个ind对应的没有很大的高度差,那机器人就可以通行过去,如果两者的高度差大于H_THRED 那说明两个ind直接可能是个楼梯,或者矮墙之类的,让高度有骤然变化的点。
从这个角度出发,也就不难理解terrain_height_grid_的作用。它是映射到平面z=0的点,而我们把x和y相同的,z值不同的点,都放到了terrain_height_grid_里的cell,那么这样,一个ind可以对应terrain_height_grid_的点,而这个ind里对应的cell,就是这个x、y确定以后的一系列的空间点的高度值z。可以用图来表示:

上面的匿名函数完事以后,还有匿名函数auto AddTraversePoint = [&] (const int& idx)

这个匿名函数就没有那么复杂了,就是把传入的ind转成terrain_height_grid_下的坐标点cpos,然后用第一次发现该点的z值(cell里的第一个点的z值)去替换掉cpos的z值。接着把它从point3d类型转成pclpoint类型,并存到terrain_height_ptr_里,这个terrain_height_ptr_也是我们这个函数主要输出的东西。最后最后,把terrain_grid_traverse_list_[idx] = 1 代表可以通行。
两个匿名函数讲完,我们接着讲:

这个robot_idx我感觉很奇怪,因为robot_sub一直是固定的(44,44,0)

我们来分析一下,因为在执行这个函数之前都会执行一次UpdateRobotPosition,在这里面,除了更新obs_indices和free_indices以外,还会更新TerrainHeightGridOrigin,也就是更新小车的odom在terrain_height_grid上的位置信息,那么再把它还原回robot_idx的时候,会用到origin信息,所以每次origin信息更新,再用origin信息反解sub,得到的sub都是44,44,0,因此用sub去解ind 得到的都是固定的3960。
下面设置两个局部变量 q 和 visited_set,然后有意思的部分就来了:
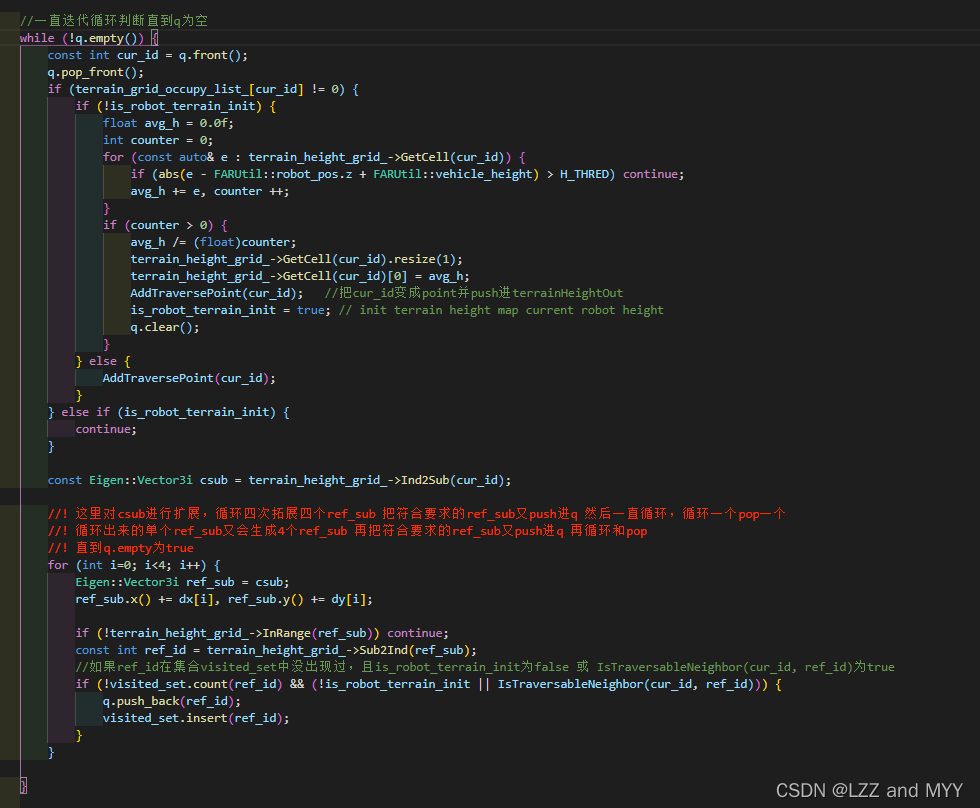
这个while循环是非常有意思的。初始的q一定不为零,因为它存了robot_idx,每次执行都会把q里前面的元素给pop掉。
首先,判断这个从q来的cur_id在terrain_grid_occupy_list_[cur_id]的值是否为0,如果为零,那就判断is_robot_terrain_init是否为true,如果为true,就重新走while循环,不执行下面的步骤。
若terrain_grid_occupy_list_[cur_id]为1,我们同样要判断is_robot_terrain_init,首次应该为fasle,那么!is_robot_terrain_init就为true。他就开始循环对应cur_id里的cell的z值,然后我们把terrain_height_grid_里的ref_id对应cell存的每一个z值都取出来,做一个小循环,把ref_id对应的每个z值与cur_h差值小于H_THRED的值都累加起来,当然counter也++。如果counter大于0,取均值,然后把cur_id对应的cell长度重置为1,把均值填进去,这个部分看过前面内容的应该都理解。接着我们就把cur_id放到匿名函数AddTraversePoint里,也就是把cur_id变成point并push进terrainHeightOut,并设置terrain_grid_traverse_list_里的cur_id位置为1 代表可以通行。接着把标志位is_robot_terrain_init = true,并清空q。如果is_robot_terrain_init为true,那么!is_robot_terrain_init就为false,就只执行AddTraversePoint(cur_id)。
我们分析一下第一次走这个程序的时候,当我们的robot_idx也就是3960输入的时候,它对应的terrain_grid_occupy_list_[3960]为0,且第一次输入,is_robot_terrain_init也为false。
那么它就会往下执行:

这个部分就是把cur_id转换成terrain_height_grid_下的csub,然后对csub进行扩展,循环四次拓展四个ref_sub,再把符合要求的ref_sub的ref_ind给它push进q,然后接着进行while循环。
比如 初始sub为(44,44,0),对应ind为3960。第一次循环完了为(43,44,0),对应的ind为3959;第二次循环为(44,45,0),对应4049,以此类推。
以ref_sub为(43,44,0)为例,那么就要先判断ref_sub在不在terrain_height_grid_的范围内,如果在,就算出terrain_height_grid_下对应的ind。之前说了,是3959,然后我们要判断这个ind有没有在visited_set里出现过,并且is_robot_terrain_init为false或IsTraversableNeighbor(cur_id, ref_id)为true,首次来说,is_robot_terrain_init肯定为false,所以我们就把这个3959给push进q里。然后在visited_set里加入这个3539。
visited_set就是用来怕我们重复包含同一个ref_id的,如果之后满足is_robot_terrain_init,那么就只能判断IsTraversableNeighbor(cur_id, ref_id)是否为true了。
举一个输出的terrain_height_ptr_点为例(-0.8,0,0.239169 - 0) pos2sub以后为(43,44,0),sub2ind以后为3959

到目前位置,UpdateTerrainHeightGrid的部分结束了。我们回到TerrainCallBack继续说:

这个红框是我们刚讲完的部分,接着往下就是更新obscloud,这部分也很简单,就是根据neighbour_obs_indices来更新,往surround_obs_cloud_对应(neighbor_ind)的地方里追加cloud就完事了。
动态障碍物的部分暂时不讲了。我们跳过去接着看。
StackCloudByTime这部分的函数把原有的stack_new_cloud_和之前刚刚生成的cur_new_cloud_进行合并,并获取系统当前时间,把合并后的stack_new_cloud_里与当前系统时间差距1s以上的点全部去除掉。输出新的stack_new_cloud_。

