OpenHarmony恢复启动子系统init进程之服务管理与发布
配置文件加载
Jobs 实际上是作为参数使用,作为trigger参数使用。
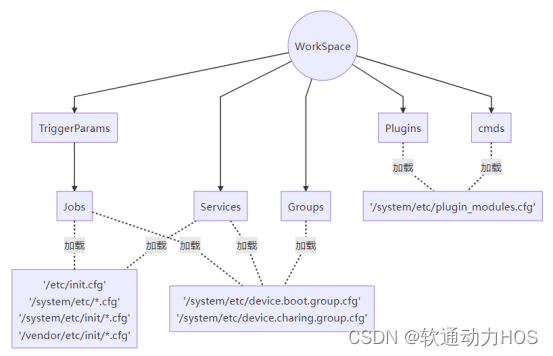
使用HashMap管理,所有结点按类型存储,通过name获取。
|
文件 |
加载类型 |
说明 |
|
/etc/init.cfg |
Jobs,Services |
|
|
/system/etc/*.cfg |
Jobs,Services |
|
|
/system/etc/init/*.cfg |
Jobs,Services |
系统SA服务 |
|
/vendor/etc/init/ *.cfg |
Jobs,Services |
供应商SA服务 |
|
/system/etc/plugin_modules.cfg |
插件信息 |
主要是提供了bootchart 插件,用于统计系统信息。 |
|
/vendor/etc/init/init.{hardware}.cfg |
Jobs,Services |
平台移植时,完成平台相关的初始化设置,如安装ko驱动,设置平台相关的/proc节点信息 |
|
/system/etc/device.boot.group.cfg /system/etc/device.charing.group.cfg |
Jobs,Services,Groups |
|
cfg 配置文件:
cfg 文件是一种json格式的配置文件,由import,jobs,services 三部分构成。
import 表示依赖的cfg配置,格式和语法都一样,也需要解析加载。跟硬件设备相关的可以加载在这里。
jobs 是需要执行的命令集合,执行的是一组命令,可以通过start ,stop命令启动服务,也可以通过trigger命令触发其他job
services 定义的是服务的名称、执行path、触发条件,重启条件等,服务也可以通过调用jobs。具体在服务管理里有详细讲解。
"import":[ "/etc/init.usb.cfg", "/etc/init.usb.configfs.cfg", "/vendor/etc/init.${ohos.boot.hardware}.cfg"],"jobs":[ { "name":"init", "cmds":[ ] }],"services":[ { "name" : "ueventd", "path" : ["/system/bin/ueventd"], "critical" : [ 0, 15, 5], "ondemand" : true, "start-mode" : "condition" }]插件:
{ "modules" : [ { "name": "bootchart", "start-mode" : "static", "lib-name" : "libbootchart.z.so" } ]}bootchart 插件:
bootchart是一个用于linux启动过程性能分析的开源工具软件,在系统中自动收集CPU占用率、磁盘吞吐率、进程等信息,并以图形方式显示分析结果,可用作指导优化系统启动过程
用户态可通过begetctl 启动。
将/data/bootchart/下的log文件导出来。在Ubuntu上通过pybootchartgui.py 工具分析。
服务发布
服务发布是将socket,file 等创建或打开之后,将句柄fd设置到环境变量,并且在当前进程及子进程都可以使用。
#define HOS_SOCKET_DIR "/dev/unix/socket"#define HOS_SOCKET_ENV_PREFIX "OHOS_SOCKET_"static int SetSocketEnv(int fd, const char *name){ INIT_ERROR_CHECK(name != NULL, return SERVICE_FAILURE, "Invalid name"); char pubName[MAX_SOCKET_ENV_PREFIX_LEN] = { 0 }; char val[MAX_SOCKET_FD_LEN] = { 0 }; INIT_CHECK_RETURN_VALUE(snprintf_s(pubName, sizeof(pubName), sizeof(pubName) - 1, HOS_SOCKET_ENV_PREFIX "%s", name) >= 0, -1); INIT_CHECK_RETURN_VALUE(snprintf_s(val, sizeof(val), sizeof(val) - 1, "%d", fd) >= 0, -1); int ret = setenv(pubName, val, 1); INIT_ERROR_CHECK(ret >= 0, return -1, "setenv fail %d ", errno); fcntl(fd, F_SETFD, 0); return 0;}比如fd = 100,name="ueventd" 最终设置了一个环境变量: OHOS_SOCKET_ueventd="100"
执行服务进程之后,在服务进程内部会查找这个环境变量,获取fd的值100,并启动服务循环,收发数据。
如果没找到这个环境变量,服务进程内部按默认参数创建一个socket,并启动循环收发数据。
发布服务的主要目的:
- 能较好使用外部配置的参数来创建服务
- 避免重复创建同一个socket服务,或重复打开同一个文件服务
- 按需启动的情况下,父进程希望控制服务进程的启动和停止
- 服务代持能力
技术关键:
fcntl(fd, F_SETFD, 0);
主要是将SOCKET_CLOEXEC标志清除掉,这样才能在子进程访问,否则无法访问。或者在创建socket的时候,去掉SOCKET_CLOEXEC;如果是文件,这个标志是O_CLOEXEC。
FD代持(仅标准系统以上提供)
FD代持是按需启动的一个辅助扩展机制,按需启动进程可以保持退出前的fd状态句柄不丢失。按需启动进程退出前可将fd发送给init代持,再次启动后再从init获取fd。
init提供了相关接口供服务调用,服务进程退出前调用接口将fd通过支持IPC通信的socket发送给init代持,待该服务重新启动时,init将持有的该服务相关的fd句柄通过同样的方式返回给服务。
服务配置
cfg 的services部分:
"services" : [{ "name" : "ueventd", "path" : ["/system/bin/ueventd"], "socket" : [{ "name" : "ueventd", "family" : "AF_NETLINK", "type" : "SOCK_DGRAM", "protocol" : "NETLINK_KOBJECT_UEVENT", "permissions" : "0660", "uid" : "system", "gid" : "system", "option" : [ "SOCKET_OPTION_PASSCRED", "SOCKET_OPTION_RCVBUFFORCE", "SOCK_CLOEXEC", "SOCK_NONBLOCK" ] }], "critical" : [ 0, 15, 5], "ondemand" : true, "start-mode" : "condition" }, { "name" : "console", "path" : ["/system/bin/sh"], "start-mode" : "condition", "disabled" : 1, "console" : 1, "uid" : "root", "gid" : ["shell", "log", "readproc"], "jobs" : { "on-start" : "services:console" } }, { "name" : "watchdog_service", "start-mode" : "condition", "path" : ["/system/bin/watchdog_service", "10", "2"], "disabled" : 1, "uid" : "root", "gid" : ["shell", "log", "readproc"] }, { "name" : "misc", "path" : ["/system/bin/misc_daemon", "--write_logo", "/vendor/logo.rgb"], "once" : 1 } ]附录表——service字段说明
|
字段名 |
说明 |
|
name |
当前服务的名称,须确保非空且长度≤32字节。 |
|
path |
当前服务的可执行文件全路径和参数,数组形式。须确保第一个数组元素为可执行文件路径、数组元素个数≤20、每个元素为字符串形式以及每个字符串长度≤64字节。 |
|
uid |
当前服务进程的uid值。 |
|
gid |
当前服务进程的gid值。 |
|
secon |
当前服务进程的安全上下文(当前不需要设置该字段)。 |
|
once |
当前服务进程是否为一次性进程: 1:一次性进程,当该进程退出时,init不会重新启动该服务进程 0 : 常驻进程,当该进程退出时,init收到SIGCHLD信号并重新启动该服务进程; 注意:对于常驻进程,若在4分钟之内连续退出5次,第5次退出时init将不会再重新拉起该服务进程。 |
|
importance |
当前服务进程优先级, 取值范围[19, -20] |
|
caps |
当前服务所需的capability值,根据安全子系统已支持的capability,评估所需的capability,遵循最小权限原则配置(当前最多可配置100个值)。 |
|
critical |
服务启动失败后, 需要M秒内重新拉起, 拉起失败N次后, 直接重启系统, N默认为4, M默认20。(仅L2以上提供 "critical" : [0, 2, 10]) 0:不使能; 1:使能; |
|
cpucores |
服务需要的绑定的cpu核心数, 类型为int型数组 |
|
d-caps |
分布式能力 (仅L2以上提供) |
|
apl |
能力特权级别:system_core, normal, system_basic。 默认system_core (仅L2以上提供) |
|
start-mode |
服务的启动模式,具体描述:init服务启动控制(仅L2以上提供)。包括condition,boot,normal |
|
jobs |
当前服务在不同阶段可以执行的job。具体说明可以看:init服务并行控制(仅L2以上提供),类似于: "jobs" : { "on-boot" : "services:console" "on-start" : "services:console" "on-stop" : "services:console" } |
|
ondemand |
,按需启动的服务需要配置的属性,配置有该属性的服务不会被start命令拉起,如果该服务同时配置有socket,init将会在解析服务时创建该socket并将其监听,当socket有消息上报时,init拉起对应服务 |
按需启动:
触发服务启动的事件可能是被init监听的相关socket有消息上报、samgr收到客户端的请求需要拉起SA服务等情况;
- SA进程按需启动
应用请求SA句柄时samgr 需验证sa_profile.xml 是否配置为按需启动
- socket进程按需启动
init进程在fork阶段为socket发布socket
socket上有报文事件后,init进程拉起socket进程进行报文处理,init进程取消socket数据的监听,由socket进程处理。socket进程无报文处理后,可以自动退出,退出后init进程回收该子进程并重新监听socket网络数据。
- 热插拔服务进程按需启动
进程可根据系统参数的变化进行热插拔事件按需启动处理。

