针对车载系统相关的功能分析(车载OS、芯片、导航、DC、总线系统等)
关于车载显示系统相关的功能分析
- 前言
- 1 基本介绍
- 2 关于车载操作系统
-
- 2.1 华为鸿蒙车载OS
- 2.2 阿里AliOS
- 2.3 Microsoft WinCE
- 2.4 BlackBerry QNX
- 2.5 Android
- 2.6 Linux
- 3 车载芯片分类
- 4 车载导航系统
- 5 车载显控系统
- 6 车载娱乐系统举例
- 7 车载总线网络系统
-
- 7.1 传统车载网络系统
- 7.2 车载以太网
Author: Nirvana Of Phoenixl Proverbs
For you:There is no doubt that good things will always come, and when it comes late, it can be a surprise.
Tips: 本文内容个人总结分享参考仅供大家参考学习,文中图片部分来自互联网查询。
前言
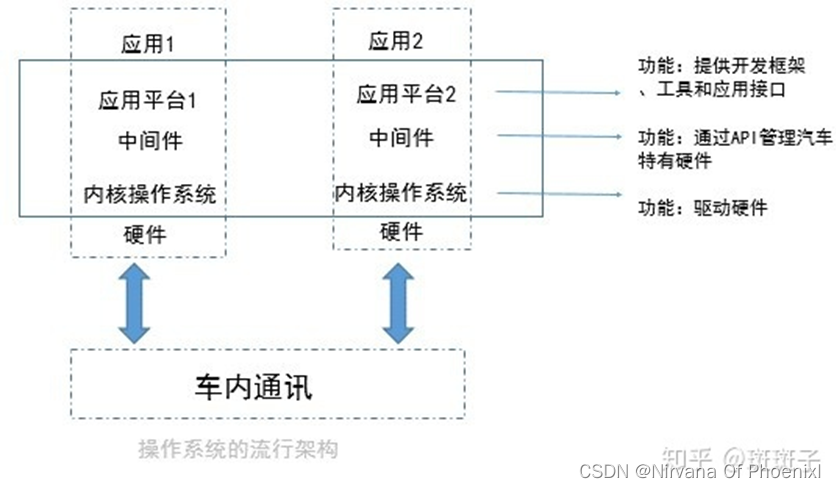
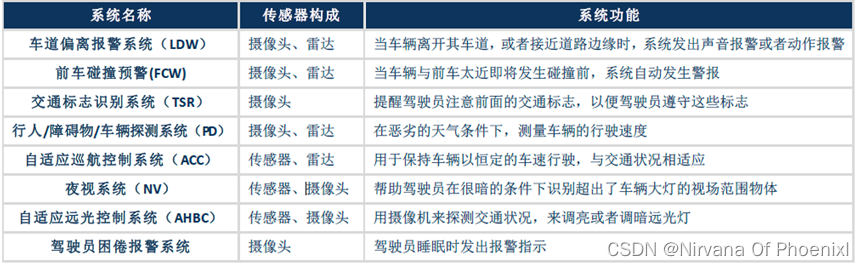
目前车载系统正在向着智能化发展,智慧车载系统成为了车载系统的主流。面向不同的应用场景,针对性的分析车载系统,包括其控制系统、信息交互系统、显示控制系统等。本文简要分析车载系统的功能点,从而分不同的类型点进行分类总结,资料拙见仅参。随着车载功能的逐渐丰富及软件交互接口标准的种类增加,基于微控制芯片的嵌入式操纵系统逐渐被引入,有效的分配CPU资源,对各种任务功能进行协同管理,合理控制优先级,如下图所示:
1 基本介绍
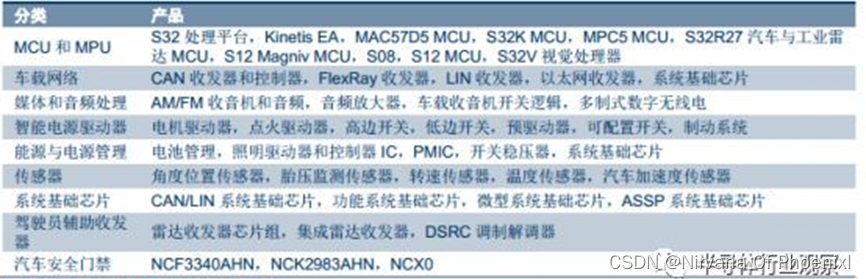
汽车电子布局:恩智浦汽车半导体产品覆盖 MCU 和 MPU、车载网络、媒体和音频处理、智能电源驱动器、能源与电源管理、传感器、系统基础芯片、驾驶员辅助收发器、汽车安全等。
自动驾驶平台:恩智浦 BlueBox 是一款自动驾驶开发平台,集成了 S32V234 汽车视觉和传感器融合处理器、 S2084A 嵌入式计算处理器、 S32R27 雷达微控制器。BlueBox 可完成多传感器融合(毫米波雷达、视觉、激光雷达、车联网),支撑 L4级自动驾驶,功耗小于 40W,算力达 90,000 DMIPS(Dhrystone Million Instructionsexecuted Per Second,百万条指令每秒)。
视觉芯片:S32V234 视觉处理器, 拥有 CPU(4 颗 ARM CortexA53 和 1 颗 M4)、3D GPU(Vivante GC3000)和视觉加速单元(2 颗 APEX-2vision accelerator), 支持4 路摄像头。 可用于前视摄像头、后视摄像头、环视系统、传感器融合系统等, 能实时 3D 建模,计算能力为 50GFLOPs。 同时, S32V234 芯片预留了支持毫米波雷达、激光雷达、超声波的接口,可实现多传感器数据融合,最高可支持 ISO26262ASIL-C 标准。
雷达芯片:S32R27 雷达处理器,采用两个 e200z7 32 位 CPU 和两个 32 位锁步模式 e200z4, 能够支持自适应巡航控制、智能大灯控制、车道偏离警告和盲点探测等功能。
2 关于车载操作系统
由于新基建、5G应用、智慧交通、汽车“新四化”等热词的席卷,汽车车载操作系统已成为汽车产业链路上各大企业的必争之环。整车厂、集成供应商、互联网科技巨头纷纷下场布局,试图抢占核心控制。
车载操作系统(Automotive Operating System ,简称车载OS)与车控操作系统同属于汽车操作系统,但并不管理车辆动力、底盘、车身等基础硬件,而是一个管理和控制车载软件、硬件资源的程序系统,支撑了汽车的上层软件开发、数据连接、HMI。车载OS具体可以实现的功能有:
(1)管理车载系统的数据资源、硬软件,并且控制应用程序的运行。(2)提供多形式的人机界面,支持上层软件的运行。
目前车载操作系统领域存在着差异化的解决方案。各大企业切入车载OS领域的途径不同,具体分为平台层和应用层。平台层的解决方案是基于QNX、Linux及Andriod等底层操作系统进行不同策略的定制化开发。一类是基于Linux等底层系统框架进行深度定制化开发,包括了系统内核修改,称为独立的操作系统,如AliOS,华为鸿蒙OS。另一类则是基于安卓(或Unux)进行定制化开发,但不涉及到系统内核更改,一般称为基于ROM定制,如奥迪、蔚来、比亚迪、吉利等车企半自主研发。而应用层,比较常规的是搭建手机映射系统去整合地图、音乐、语音、社交等功能来满足车主的需求,如腾讯TAI,CarPlay等。
下面介绍几大在汽车领域应用比较大的操作系统。OS,英文全称operating system,即操作系统,意思是指用于管理计算机硬件和软件资源,并提供通用服务的计算机程序。对于我们日常接触的OS而言,操作系统就是Windows、Macos、Android,基于工程师们比较钟爱的Linux等。但是对于车载OS而言,一般就比较陌生了,车载OS,顾名思义,就是在汽车上使用的OS,与普通电脑、移动终端的OS不同,这类OS使用在汽车上。但是车载OS也有很多的分类和用途。未来,汽车将演变为移动智能终端,软件将定义汽车,OS是传统车企实现数字转型的关键,成为各企业必争的战略要地。在汽车领域,OS包括与安全相关的控制系统OS和与用户体验相关的IVI(信息娱乐系统)OS两大部分。至于各个操作系统之间有什么区别,有什么重要性,一般人是不关心的,但是随着智能网联汽车技术的发展,自动驾驶距离推广应用越来越近,车载操作系统很快进入汽车行业巨头的视线,并且纷纷布局,智能网联汽车发展大背景下的车载OS。 进入2019年,车载OS领域的竞争急剧升温,QNX由于其安全性优势成为智能网联汽车行业的新宠,Linux基于自身开源特性和广大的工程师基础在低调中默默吸取市场份额,Google充分发挥Android开源优势并向第三方开发者开放Android Automotive OS,大众提出要自研vw.OS,斑马网络也进行重组并开放三大融合模式,华为鸿蒙同样剑指汽车。主机厂、谷歌、阿里以及华为等开始上演新一轮智能网联汽车入口争夺战。
2.1 华为鸿蒙车载OS
鸿蒙OS(英文:HarmonyOS)。在2019年8月9日,华为在东莞举行华HDC2019开发者大会,正式发布操作系统鸿蒙OS。华为称鸿蒙OS是一款“面向未来”的操作系统,一款基于微内核的面向全场景的分布式操作系统,它将适配手机、平板、电视、智能汽车、可穿戴设备等多终端设备。

鸿蒙系统(HarmonyOS)是基于微内核的全场景分布式OS,可按需扩展,实现更广泛的系统安全,主要用于物联网,特点是低时延,甚至可到毫秒级乃至亚毫秒级。鸿蒙OS实现了模块化耦合,有三层架构,第一层是内核,第二层是基础服务,第三层是程序框架,对应不同设备可弹性部署。可用于大屏、PC、汽车等各种不同的设备上。
鸿蒙OS的“分布式OS架构”和“分布式软总线技术”通过公共通信平台,分布式数据管理,分布式能力调度和虚拟外设四大能力,将相应分布式应用的底层技术实现难度对应用开发者屏蔽,使开发者能够聚焦自身业务逻辑,像开发同一终端一样开发跨终端分布式应用,也使最终消费者享受到强大的跨终端业务协同能力为各使用场景带来的无缝体验。
鸿蒙OS通过使用确定时延引擎和高性能IPC两大技术解决现有系统性能不足的问题。确定时延引擎可在任务执行前分配系统中任务执行优先级及时限进行调度处理,优先级高的任务资源将优先保障调度,应用响应时延降低25.7%。鸿蒙微内核结构小巧的特性使IPC(进程间通信)性能大大提高,进程通信效率较现有系统提升5倍。
鸿蒙OS采用全新的微内核设计,拥有更强的安全特性和低时延等特点。微内核设计的基本思想是简化内核功能,在内核之外的用户态尽可能多地实现系统服务,同时加入相互之间的安全保护。微内核只提供最基础的服务,比如多进程调度和多进程通信等。鸿蒙OS将微内核技术应用于可信执行环境(TEE),通过形式化方法,重塑可信安全。鸿蒙OS通过统一IDE支撑一次开发,多端部署,实现跨终端生态共享。鸿蒙OS凭借多终端开发IDE,多语言统一编译,分布式架构Kit提供屏幕布局控件以及交互的自动适配,支持控件拖拽,面向预览的可视化编程,从而使开发者可以基于同一工程高效构建多端自动运行App,实现真正的一次开发,多端部署,在跨设备之间实现共享生态。
HarmonyOS预计将从2020年8月开始开源,这一事实可能会加快操作系统的开发速度。相对于Android,华为OS还具有一些固有的设计优势,
首先是鸿蒙OS的分布式体系结构,华为称它将使鸿蒙OS比Android更快。Android包含许多不必要的代码行和遗留问题,而分布式体系结构则提供了更为简洁的代码结构。
其次,鸿蒙OS的微内核设计可以提供更高的安全性和更低的延迟。相比之下,Android使用其基于Linux的内核执行的代码大约多出1000倍。
第三,华为的ARK编译器和专用的IDE(应用程序套件)将简化应用程序向鸿蒙OS的迁移,因为它简化了Android开发人员对应用程序进行调整的过程。这将消除为多个设备重新开发应用程序的需要。
华为此前已经宣称这款操作系统经过多年时间的打磨,已经成功解决不少系统底层的难题,目前还在持续投入并鼓励全球应用开发者共同丰富软件生态。
2.2 阿里AliOS
2017年9月27日,阿里巴巴发布全新的AliOS品牌及口号,面向汽车、IoT终端、IoT芯片和工业领域研发物联网操作系统,并整合原YunOS移动端业务。
AliOS 是基于 Linux Kernel 研发的驱动万物智能的操作系统,适用于多种设备类型,如物联网设备、手机、平板电脑、电视、车载系统等。
2018年09月22日AliOS发布新版操作系统AliOS 2.0,斑马则公布了MARS(即斑马智行的3.0版本)。AliOS 2.0系统在感知、交互、应用、平台、安全五个领域实现了突破。在感知上,AliOS将从车内的感知扩展到全车感知,覆盖车机、胎压等方面;此外还支持人脸识别、路况感知以及车路协同。
在交互上,增加了多模态的智能交互方式,用户可以进行语音、手势、触摸相组合的操作;AliOS 2.0也支持多屏显示和操作,屏幕可独立控制也可共享显示。
在应用上,AliOS 2.0可以通过AR技术,在液晶仪表盘反馈路况,并提供导航提醒;对驾驶行为与车辆状况实时监测、为企业和个人提供驾驶风险管理服务。
在平台上,新版AliOS推出面向车的应用开发框架和端上机器学习推理框架;应用开放框架包含智能交互、车应用开发模型、AI与车辆数据;端上推理框架无需联网,针对这点,AliOS将与芯片厂商进行合作。在安全方面,AliOS通过建立授权、鉴权机制和访问控制,以及基于芯片硬件安全架构来保证数据的安全。
作为基于AliOS 开发的解决方案,MARS在应用场景上则更具体一些。相比起斑马智行2.0,MARS全面融合了AI技术。MARS的十项亮点功能分别是:AI场景引擎、车载K歌系统、跨端组队、全天候地图、我的快递、沉浸式音乐、AR辅助驾驶、首个车内AI萌宠、专属个人通勤地图以及疯狂答题。AliOS和斑马,都公布了开放平台。AliOS开放平台开放了包括云应用开发、场景智能感知等6大类60余项底层系统级别能力,并同步提供车载开发工具和测试环境,开发者可对驾驶舱、 车灯、故障等100多种实车信号进行快速模拟。
此次发布的AliOS,在应用上,首次提出了端上机器学习的框架,让操作系统在端上也可以进行深度学习,不需要联网就能应用人工智能。而基于AliOS的斑马也非常强调人工智能,其AI场景引擎功能就是人工智能在汽车使用场景中将会涉及到的应用。
在车载操作系统中,阿里和斑马以及步入了更为智能化的阶段。在2016年,阿里与上汽合资成立的斑马智行推出了首款互联网汽车——荣威RX5,到目前为止,上汽的互联网汽车累计销量已经超过70万辆。目前,阿里和斑马都希望将这一数字扩大,因此也不难理解为何今日两家公司都推出了开放平台。
2.3 Microsoft WinCE
2004年,比尔.盖茨在一次演讲会上宣称:如果通用汽车公司象计算机行业那样紧跟技术的发展,我们今天早就可以用一加仑汽油跑100英里了。通用汽车公司总裁对此回应道:如果通用汽车公司象微软那样发展技术,那么我们今天驾驶的汽车就会有如下特点:汽车每天会无缘无故重启、哑火,有时还必须同时搬门柄,转钥匙,抓紧收音机天线,完成重启。
通用汽车总裁,在用这些比喻来暗指Windows系统的问题,但从另外一个方面,也反映了车载OS对于出错的容忍度低,可靠性要求高,远非消费品可比。那么被嘲笑的微软在车载OS领域是否真的一无建树?不然,微软在车载OS领域的尝试,从WinCE开始,Windows CE操作系统是在PC Windows操作系统基础上研发而来的,用法、功能上相近。Windows CE系统对RAM的主流配置都在256MB左右,处理器主频500MHz左右即可。对硬件要求不高,在传统车载导航领域应用广泛但,WinCE 并没有像在电脑端一样统治OS。根本原因在于,车载OS的应用,一方面有赖于车身电气化,OS能有更多用武之地,另一方面安全性要有保障。而这两点,都是WinCE发展的时代不曾具备的。后随着车联网发展,衍生出了手机互联的过度产品,但很快在自动驾驶发展的浪潮下,被真正的车载OS取代了。
2.4 BlackBerry QNX
QNX是一种商用的遵从POSIX规范的类Unix实时操作系统,目标市场主要是面向嵌入式系统。它可能是最成功的微内核操作系统之一。以目前的情况看,车载OS分两个方向发展,一条是管理车载信息娱乐的系统,一条是负责车身电子元器件的OS。这种OS分离的方式,主要是为了安全。而提到车载OS的安全,就跨不过QNX。

QNX软件已广泛用于汽车行业的远程信息处理系统。自Harman购买以来,QNX软件已被应用到200多种不同的汽车品牌和型号中不仅在远程信息处理系统中,而且在信息娱乐和导航单元中也是如此。用于信息娱乐的QNX CAR平台采用了一系列QNX中间件技术,可处理媒体,网页浏览,语音集成,智能手机连接,无线(OTA)软件升级,手持蓝牙和免费电话。QNX系统支持第三方应用程序和第三方产品,比如导航,语音识别等。该平台支持所有主要的汽车级硬件,并采用模块化和可扩展的架构构建。可灵活应用到高中低级信息娱乐系统。用于汽车电控单元嵌入式软件的QNX OS for Safety 2.0是QNX 7.0产品系列中第一个经过安全认证的产品。它基于QNX SDP 7.0,目前是最先进,最安全的嵌入式操作系统,适用于所有安全和关键任务应用QNX OS for Safety 2.0通过了ASIL D(汽车行业最高安全等级标准)的ISO 26262和TVRheinland的IEC 61508 SIL3认证。
QNX在车载OS领域绝对是垄断性的存在,全球100%的OEM商都和QNX合作,而一些新晋OEM车企包括蔚来、拜腾等同样也选择了QNX作为其合作伙伴。而对于Tier1来说,前八家Tier1都是QNX的客户。目前全球共有1.2亿辆汽车在使用QNX技术。QNX参与到超过290个整车生产中,成功率是100%。
QNX在汽车安全件系统部分,几无挑战者,从奔驰到比亚迪,鲜有不用QNX做仪表、辅助驾驶之用的,QNX在车载信息娱乐系统或车联网系统占据超过60%的市场份额,通用Onstar、宝马ConnectedDrive、奥迪MMI、丰田/雷克萨斯Entune都使用了QNX技术。
2.5 Android
虽然QNX在车载OS领域中一家独大,但是由于OEM定制化难,开发费高昂等因素制约了QNX在普通汽车部件供应商行业的推广,与此同时更具灵活性和易用性的Android获得了市场机遇。
Android本是Google为移动端打造的操作系统,它基于Linux内核和其他开源软件的修改版本,主要用于智能手机和平板电脑等触摸屏移动设备,因免费开源而行销世界。Android本未涉足车载OS,但部分供应商为了低成本应用将Android搬上了汽车,用作信息娱乐、导航,无关安全,免费易用。在大部分汽车电气化不足,自动驾驶尚处于概念之时,各色Android车载OS驾着车联网的东风,悄无声息的在车载信息娱乐OS市场攻城拔寨。Google发现车载OS的巨大市场潜力之后,投入精力开发了Android Auto,专门服务车载领域。为了加快进程,Google也建立了一个联盟OAA,不仅有芯片厂商NVIDIA,还有全球OEM大佬奥迪、通用、现代等。势要在车载OS领域打出一片天下。Android的买家,不仅包括绝大部分后装供应商,同时也有新兴造车势力,研发实力平平的传统OEM,也有愿意尝鲜者,备下第三选择的OEM。OEM不乐见QNX一家独大,有意无意在扶持着竞争对手,Android便是一个选择。
因此同样一家OEM,会在不同的车型上,应用不同的系统。但是,由于Android的开源特性,绝大部分Android拥趸,都将之用于信息娱乐、导航使用,此为非安全件,安全性要求较低,车规要求宽松,个性化需求多,Android正符合要求。但对漏洞、安全低容忍的仪表、辅助驾驶相关系统,则不是Android的法外之地。
吉利推出的GKUI智能车载系统,使用的就是基于安卓平台打造的汽车智能生态系统,吉利车载OS经历了三代的发展,最初的G-Netlink采用的是Linux系统。奇瑞的Cloudrive、东风的windlink 3.0、长安的in-call基于安卓架构进行深度开发。上汽通用在Linux系统的基础上,2017年引入了Android系统。比亚迪搭载的也是安卓车载系统,充当信息娱乐功用。新造车势力蔚来、小鹏、威马、拜腾、爱驰、奇点也都是基于Android开发了自身的车载系统。此外,站在车企背后的相关核心公司,也均在Android领域进行深耕,例如博泰推出的擎OS基于Android深度定制版。
由于Android的开放,让非常多的OEM进入了自研公开、定制化开发的道路,Android广泛的应用到了车载信息娱乐系统当中。但随着仪表系统被液晶显示取代,液晶仪表以及其它涉及安全功能的部分需要可靠的系统来驱动,供应商以及OEM的做法是使用两套软件隔离甚至硬件隔离的方案,QNX或Linux系统用来驱动仪表系统,信息娱乐系统则Android身影出现的较多。
2.6 Linux
用不起QNX,用得起Android的,或者二者都不愿用的,还有没有其他选择?当然有,Linux便是。
Linux是一个发展多年,成熟稳定的OS,广泛应用于服务器、云计算、超级计算机、银行等地方,全世界的开发者基于Linux内核,不断开发完善,成为当下非常安全、稳定的操作系统之一。最重要的,Linux还是开源免费的。
因此,虽然以前Linux并未在汽车领域使用,但Linux已经使用过的领域,安全性、可靠性要求并不比之低。因此,汽车行业对Linux的信任度很高。这也就给了OEM、供应商QNX、Android之外的另一种选择。

基于Linux成熟版本开发的定制化系统,既可以用作驱动安全件的ADAS、仪表显示系统,也可以用于信息娱乐系统。不过由于Linux应用生态不完善,大多数信息娱乐系统还会倾向于使用Android。
Linux组织看到了车载OS巨大的前景,于是又成立了一个公益性的受欢迎的组织——AGL(Automotive Grade Linux)。Automotive Grade Linux是一个协作开源项目,它将汽车制造商,供应商和技术公司聚集在一起,以加速开发和采用完全开放的联网汽车软件堆栈。以Linux为核心,AGL正在开发一个开放式平台,可以作为事实上的行业标准,以实现新功能和技术的快速开发。AGL目前已经吸引了超过一百家的全球合伙人,这其中不乏丰田、戴姆勒、本田、三菱、福特等国际OEM巨头,电装、大陆等Tier1,瑞萨、IntelNVIDIA、三星、NXP、ARM、高通等芯片巨擘,也有中国厂商的身影,如中国移动、东软、德赛西威等。
AGL统一代码库(UCB)是一个Linux分销商,UCB信息娱乐平台的目标是为生产项目提供70-80%的起点。这使汽车制造商和供应商能够将其资源集中在定制其他20-30%以满足其独特的产品需求上。主要功能包括:AGL申请框架、用于配对多个设备的ConnMan网络管理、具有内置安全性的车辆总线消息传递,以防止不必要的入侵、音频路由和混音、多种显示功能(前后座椅)、具有WiFi和LTE的IP网络管理器、Linux安全模块、使用Yocto Project进行基于Linux的分发、远程信息处理,IC,ADAS的设备配置文件。
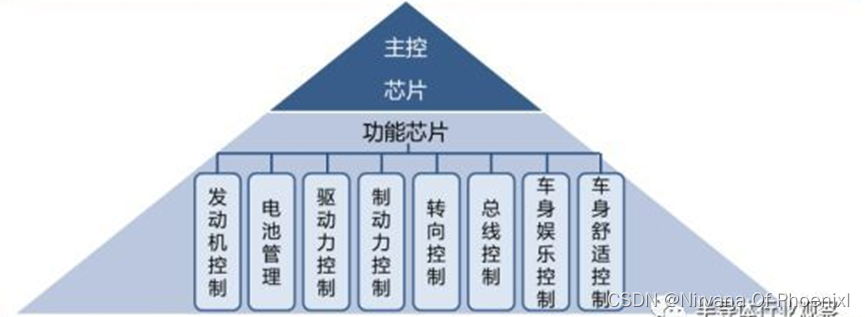
3 车载芯片分类
车载芯片大致可以分为三类:
第一类:主要负责算力和处理能力
比如用于自动驾驶感知和融合AI的芯片,用于发动机、底盘、车身控制的传统MCU;
第二类:负责功率转换
主要完成对于汽车控制的功率转换,如IGBT等功率器件组成的大功率器件;
第三类:传感器芯片
用于自动驾驶各种雷达、导航、以及视频信息处理,安全气囊、轮胎监测等。针对车载系统需要考虑一下方面,对于不同侧重点需要,满足芯片的接口,从而表达实现出具体的功能。
4 车载导航系统
车载导航系统主要由主机、显示屏、操作键盘(遥控器)和天线组成。它实现了野外踏勘、出游旅行的数字化智能导航。它具有准确的地图、地理信息,清晰的行进路线。举例说明车载24GHZ雷达系统,以下内容图片(https://www.yongxinhezi.com/scheme/toSchemePage参考)
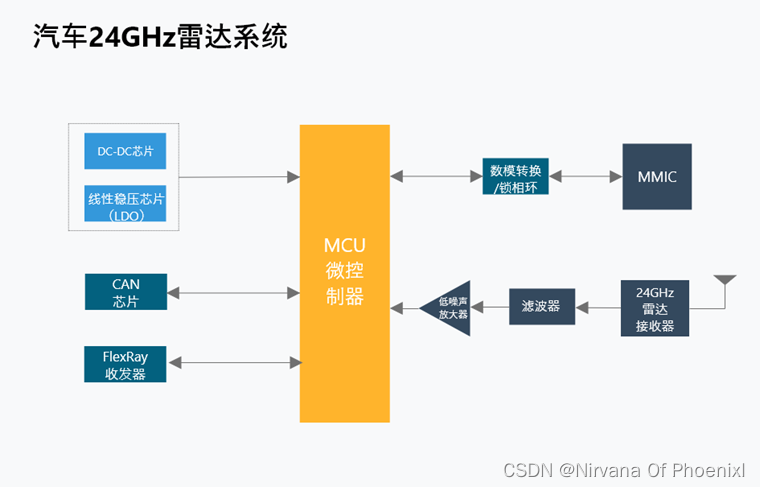
24GHz毫米微波雷达系统主要硬件构造有MMIC、天线、无线收发模块、信号处理模块等;工作频段在24GHz毫米波频段的雷达,利用目标对电磁波反射来发现目标并测定其位置的。全球全天候适时性的应用,永无盲区,免费的卫星资源更使用户随心所欲,畅心使用。多种的数据信息,位置坐标,航行路程、航行时间、方位、偏航方位角、偏航距离、预设报警。
GPS模块:安装到车辆上的小型装置,是GPS车载单元的一部分,用来接收卫星所传递的信息。
无线通信模块:通常采用车载无线电话、电台或移动数据终端(MDT)以完成信息交互功能。
报警控制模块:向监控中心网络发出报警讯号,通报车辆异常信息。
语音控制模块:完成声音控制及服务等功能。
显示模块:用来显示位置路况等视频图象信息,可选用LCD、CRT或TV显示。
车载PC:整合处理各功能模块,配合相应的软件,完成指定功能,如进行数据处理,计算出所在位置的经度,纬度,海拔,速度和时间等。
由于使用环境的特殊性,作为系统核心的车载PC的必须体积小,集成度高,功耗低,处理能力强,操作简单便捷。车载PC较多的使用嵌入式操作系统,如WINDOWSCE和嵌入式LINUX等。根据车辆使用的频繁性以及道路的复杂性的要求,它必须可靠性要高,且扩展性和兼容性要好。GPS车辆应用系统一般分为两大类:车辆跟踪系统和车辆导航系统。它们在功能上截然不同,一种是用于车辆的防盗,一种则是用于车辆的自主导航。由于“只接受,不发射”信号是GPS是接收系统的一大特点,所以用于防盗的GPS跟踪系统就是要借助通信网络以及政府配套系统给GPS车载防盗仪,提供收取使用费用的解决方案。
GPS技术是利用GPS卫星信号接收的,可以24小时不间断地接收卫星发送的数据参数结算出接收的三维位置、三维方向以及运动速度和时间信息。车载导航仪是通过接受卫星信号,配合电子地图数据,适时掌握自己的方位与目的地。
5 车载显控系统
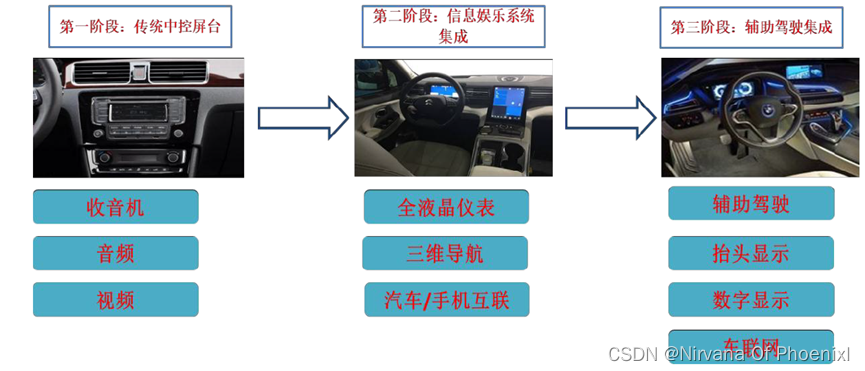
目前车载系统最为重要的就是向着智能化的方向转变,而人机交互最为直接的方式就是显示系统,因此面向智慧化的车载系统正在向着显示控制液晶转换。针对一些辅助驾驶功能、高效显示等交互方式,并在智能物联网、自动驾驶的发展趋势下,车载显示控制系统是十分重要的。如图下图所示,车载显示控制系统发展趋势。智能汽车可以分为数字座舱、车联网和无人驾驶三大发展方向,三者相互融合、相互渗透、互为补充。
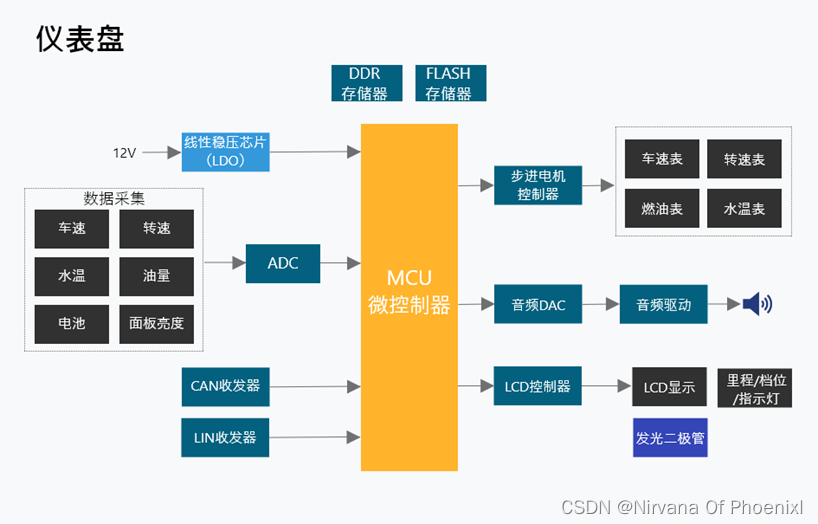
车载显控最为重要的就是关于高效的显示系统,因此对于显控系统而言最为重要的包含两个大的方面:第一方面,对于传统显示功能的体现,主要用于显示满足日常应用显示需求;第二方面,主要针对智慧座舱,面向高性能信息融合显示。下图展示简易汽车显示仪表系统级方案举例。
显控系统作为一种辅助驾驶最直接方式,需要满足各方面的视频或显示需求,因此在显示控制方面,高级辅助功能对于无论是芯片和视频图像处理功能有着较高的需求。如下图所示,高级辅助功能在显示控制方面的体现。
6 车载娱乐系统举例
车载娱乐系统包括传统入门级音响系统、广播系统等,在到高级座舱系统的复杂语音、AI智能功能等。下图举例展示车载娱乐系统级互连图。
车载信息娱乐系统主要包括VIP,AP,T-Box三个部分。
VIP :主要负责电源管理、网络、启动Application Processor、监控系统是否稳定运行(包括温度监测、电压监测)、故障诊断信息、下线检测等。
AP :主要负责娱乐系统部分、车身部分功能控制、车身信息显示、行车安全监控等。
T-BOX:是一个远程信息处理器。车载T-BOX与主机通过canbus通信,实现指令与信息的传递,包括车辆状态信息、按键状态信息、控制指令等;通过音频连接,实现双方共用麦克与喇叭输出。
下面以恩智浦解决方案图示为例
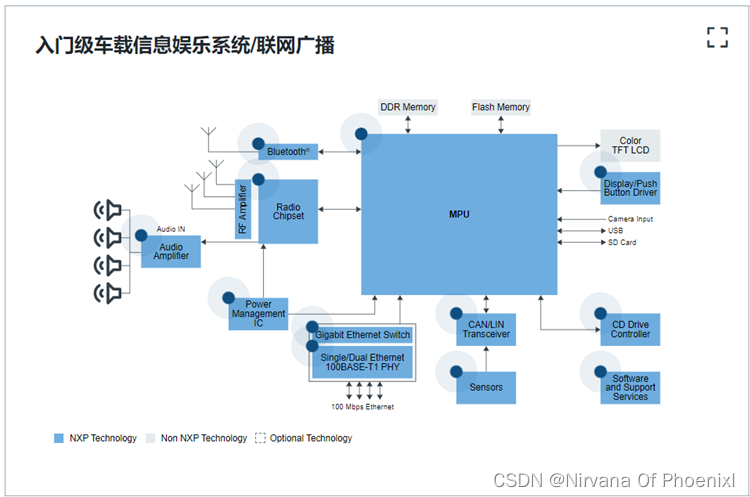
(1)传统入门级解决方案
当今的车内音频系统已从传统的广播和CD系统发展为可以从各种来源播放内容的联网系统。即使在低端市场,客户也希望能够插入USB接口、SD卡或连接Bluetooth®设备。
恩智浦的综合AM/FM调谐器和放大器解决方案和基于Arm®的微处理器组合提供了一套可扩展的产品系列,可帮助您设计入门级互连无线电和车载信息娱乐系统,带USB接口、AM/FM和蓝牙连接,具有更高的音频和用户界面能力。
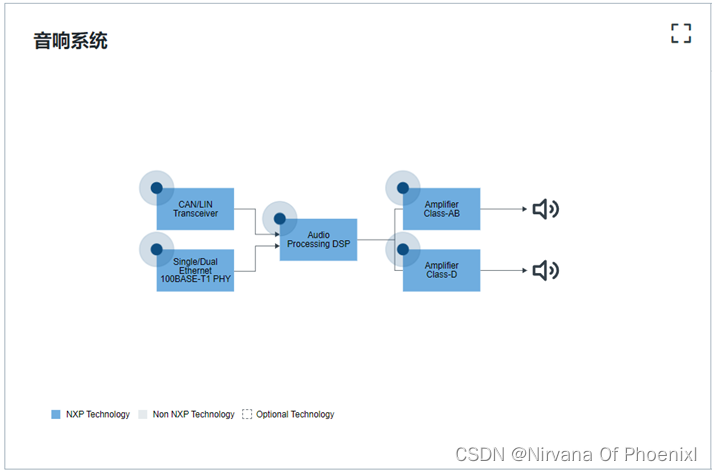
(2)音响系统解决方案
音响可以影响旅程的舒适感。交通噪声,音乐的大小或甚至空调的声音往好了说可以带来刺激,往坏了说,可以带来极大的破坏性。高级音响系统可将不受欢迎的外界声音抵消掉,根据你的要求调整音乐;使车内环境可以随心所欲或充满活力或平和舒缓。借助广泛的接收和处理音频、广播和噪声的器件组合,恩智浦还为汽车音响系统提供AB类和D类放大器。它们可以提供更多的频道、高输出功率和高电压,为客户的设计带来最大的灵活性。
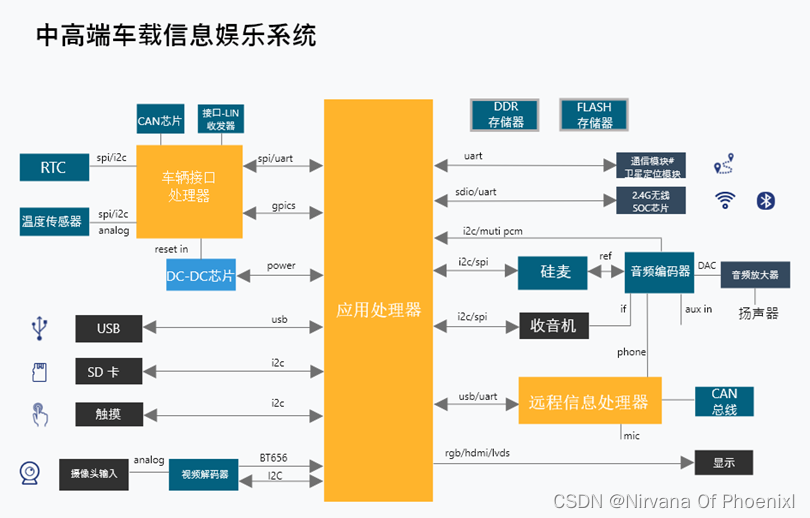
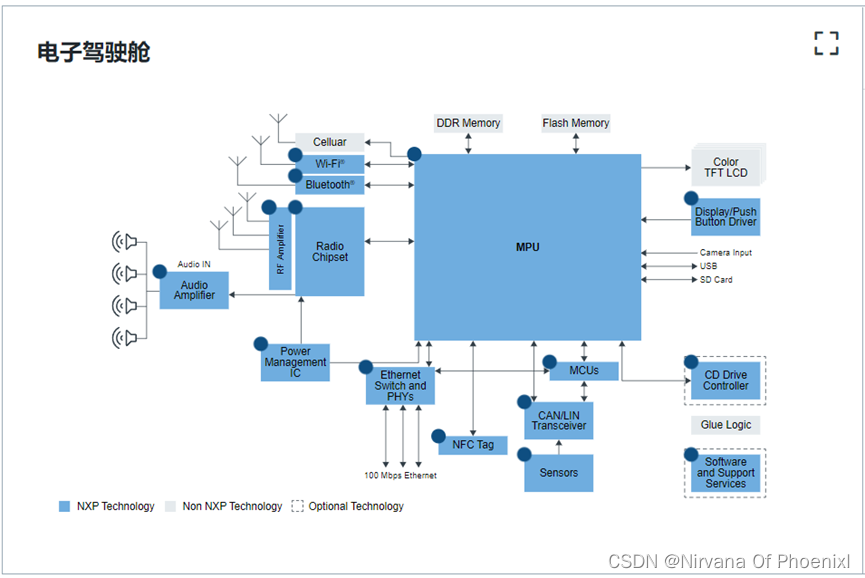
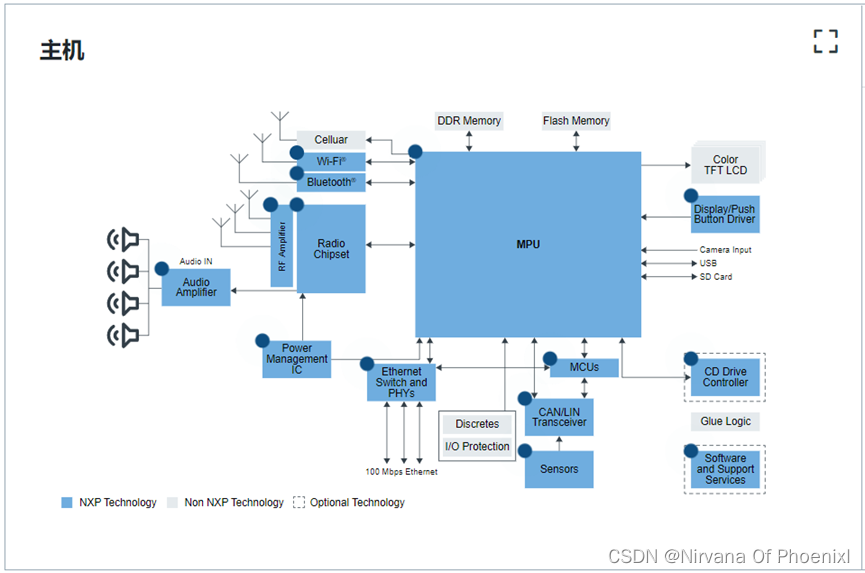
(3)中端到高端车载信息娱乐系统/电子驾驶舱
近年来,我们可以看到,车载信息娱乐系统的复杂度与日俱增。需要以实用方式处理和显示的信息量也在不断增加,这就需要强大而灵活的硬件解决方案,配以高性能图形功能和丰富接口。
恩智浦提供汽车专用微处理器、软件定义无线电(SDR)解决方案和音频放大器,满足所有OEM的要求和规范。恩智浦广泛的汽车分立和网络产品选择,改进的无线电性能和先进的音频算法实现了完整的车载信息娱乐系统解决方案。
7 车载总线网络系统
7.1 传统车载网络系统
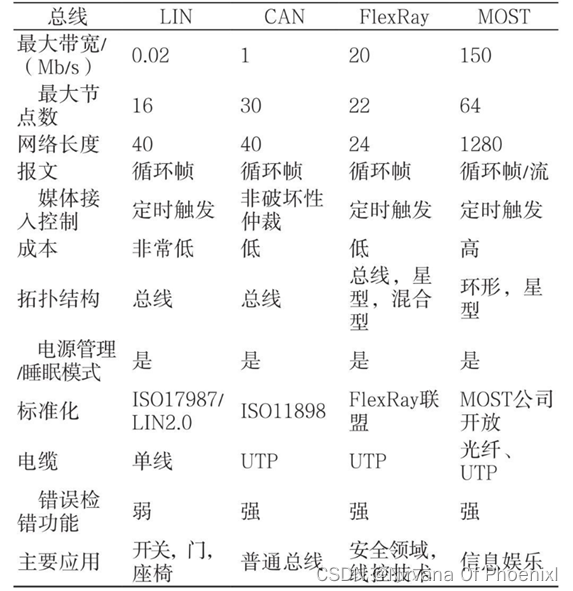
车用总线就是车载网络中底层的车用设备或车用仪表互联的通信网络。目前,有四种主流的车用总线:CAN总线、LIN总线、FlexRay总线和MOST总线。下图表示个总线的区别
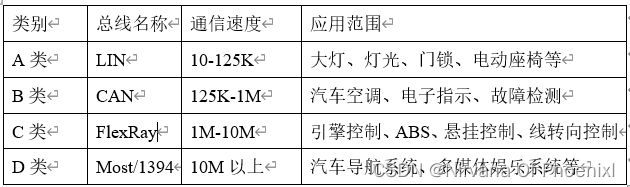
LIN 总线适合用于汽车车窗、天窗、座椅、车内照明等通信速度较低的应用场景,在满足通信速度需求与无需 CAN 总线性能的同时可进一步降低网络成本,因此在现代汽车应用中通常作为 CAN 总线的补充网络。
CAN 总线是一个性能稳健并久经车辆实践应用的网络,具备成本低与高可靠性特点,已成为各汽车制造商车载网络设计应用的首选网络。
FlexRay 提供两个独立信道,采用双信道冗余结构,基于时间发送报文,所有节点共享高准确时基,实现最高级别的可靠性,该总线用于满足汽车环境下独特的网络需求,支持重要的安全线控技术应用,如线控转向、线控制动等。
MOST 用于满足车载信息娱乐应用的特殊需求,内置流媒体数据信道,高数据带宽,支持多种光纤电缆布线方式,EMC 性能良好,主要应用于汽车音频、视频数据传输。
7.2 车载以太网
伴随着车联网、智慧驾驶、自动驾驶等新兴技术的不断深入,驾乘者对智能汽车(含信息娱乐和通信)期待越来越高,采用满足需求的新型车载总线迫在眉睫。通过 Ethernet 的高带宽,可实现快速程序刷新、音频、视频等流媒体传输以及车辆的主干网。
随着汽车科技化、智能化、网络化的不断发展,汽车 ADAS 系统、高清车载娱乐系统、车联网系统、云服务及大数据等新兴技术在车辆上的应用,现有车载总线无法满足当前需求,亟需一种高带宽、可开放、可扩展、兼容性强及网络聚合便捷的车载网络,同时满足车载严格法规要求、车载电气环境、高可靠性要求。因此,一种新型车载网络(车载以太网)应运而生。车载以太网是一种连接车内电子单元的新型局域网技术,与普通民用以太网使用 4 对非屏蔽双绞线电缆不同,车载以太网在单对非屏蔽双绞线上可实现 100 Mbit/s 甚至 1 Gbit/s 的数据传输速率,同时满足汽车行业高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求。
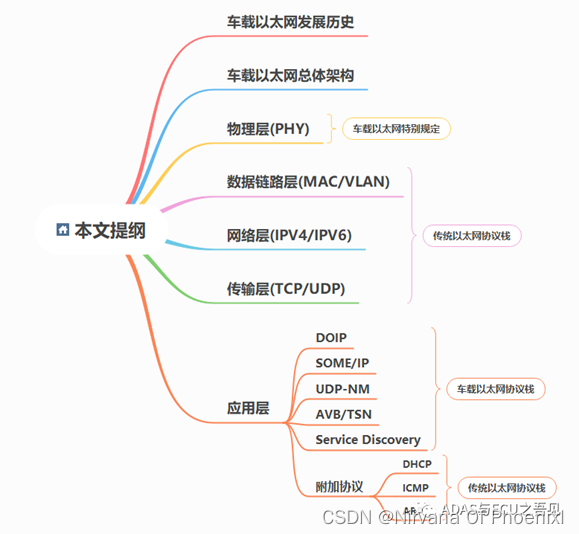
自1980至今,Ethernet1.0发布在到如今的发展到车载以太网技术,基于IEEE组织(电气与电子工程师协会)、Open Aliance SIG(非盈利性汽车行业技术联盟)组织、AVNU(致力于以太网实时性的组织)组织、AUTOSAR(汽车开放式系统架构)等共同发展合作规范了车载以太网的OSI模型整体架构如下图
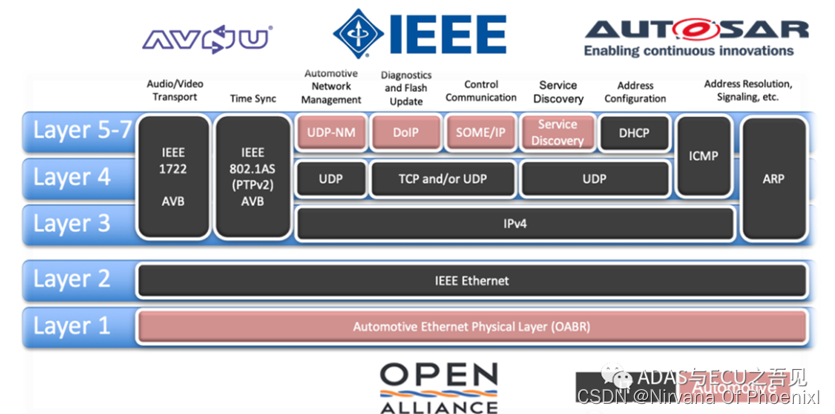
车载以太网和传统意义上的以太网相比,车载以太网的约束条件比较少,传统意义上的以太网一般采用RJ45连接,而车载以太网并未制定特定的连接器,连接方式更为灵活小巧,此外车载以太网物理层需要满足车载环境更为严格的EMC要求。车载以太网的各个参考模型与传统以太网也有一些不同,详细自查。
车载以太网被定义为下一代车载局域网络技术,短期内无法全部取代现有车载网络,其在汽车行业上的应用需要一个循序渐进的过程。依据车载以太网在汽车网络上的应用过程,大致可分为 3 个阶段:局部网络阶段、子网络阶段、多子网络阶段。(1)局部网络阶段,可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于 DoIP 协议的 OBD 诊断、使用 IP 协议的摄像头等;(2)子网络阶段,可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于 AVB 协议的多媒体娱乐及显示系统、ADAS 系统等;(3)多子网络阶段,将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用。

