HarmonyOS系统内核中消息队列的实现
大家好,今天主要来聊一聊,如何使用HarmonyOS开发实现消息队列。

目录
第一:消息队列基本简介
第二:消息队列API分析
osMessageQueueNew()
osMessageQueuePut()
osMessageQueueGet()
第三:软件设计
第四:编译调试
第五:运行结果
第一:消息队列基本简介
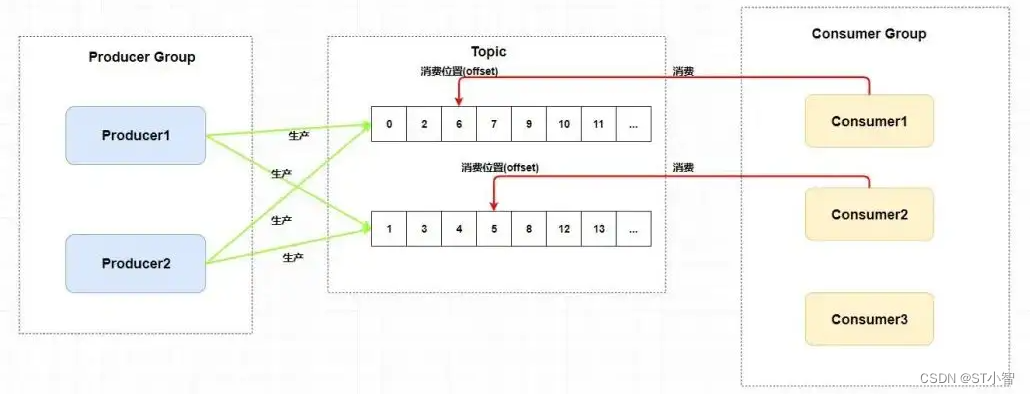
每个消息都被发送到一个特定的队列,接收者从队列中获取消息。队列保留着消息,直到他们被消费或超时。
第二:消息队列API分析
osMessageQueueNew()
osMessageQueueId_t osMessageQueueNew(uint32_t msg_count,uint32_t msg_size,const osMessageQueueAttr_t *attr)功能描述:
函数osMessageQueueNew创建并初始化一个消息队列对象。该函数返回消息队列对象标识符,如果出现错误则返回NULL,可以在RTOS启动(调用 osKernelStart)之前安全地调用该函数,也可以在内核初始化 (调用 osKernelInitialize)之前调用该函数。
参数:
| 名字 | 描述 |
|---|---|
| msg_count | 队列中的最大消息数. |
| msg_size | 最大消息大小(以字节为单位). |
| attr | 消息队列属性;空:默认值. |
osMessageQueuePut()
osStatus_t osMessageQueuePut(osMessageQueueId_t mq_id,const void *msg_ptr,uint8_t msg_prio,uint32_t timeout)功能描述:
函数osMessageQueuePut将msg_ptr指向的消息放入参数mq_id指定的消息队列中。
参数:
| 名字 | 描述 |
|---|---|
| mq_id | 由osMessageQueueNew获得的消息队列ID. |
| msg_ptr | 要发送的消息. |
| msg_prio | 指优先级. |
| timeout | 超时值. |
osMessageQueueGet()
osStatus_t osMessageQueueGet(osMessageQueueId_t mq_id,void *msg_ptr,uint8_t *msg_prio,uint32_t timeout)功能描述:
函数osMessageQueueGet从参数mq_id指定的消息队列中检索消息,并将其保存到参数msg_ptr所指向的缓冲区中。
参数:
| 名字 | 描述 |
|---|---|
| mq_id | 由osMessageQueueNew获得的消息队列ID. |
| msg_ptr | 指针指向队列中获取消息的缓冲区指针. |
| msg_prio | 指优先级. |
| timeout | 超时值. |
第三:软件设计
主要代码分析
在Message_example函数中,通过osMessageQueueNew()函数创建了消息队列ID,Thread_MsgQueue1()函数中通过osMessageQueuePut()函数向消息队列中发送消息。在Thread_MsgQueue2()函数中通过osMessageQueueGet()函数读取消息队列中的消息比打印出来。
void Thread_MsgQueue1 (void *argument) { (void)argument; msg.Buf = "Hello BearPi-HM_Nano!"; // do some work... msg.Idx = 0U; while (1) { osMessageQueuePut(mid_MsgQueue, &msg, 0U, 0U); osThreadYield(); // suspend threadosDelay(100); }} void Thread_MsgQueue2 (void *argument) { (void)argument; osStatus_t status; while (1) { // Insert thread code here... status = osMessageQueueGet(mid_MsgQueue, &msg, NULL, 0U); // wait for message if (status == osOK) { printf("Message Queue Get msg:%s\n",msg.Buf); } }}static void Message_example (void) { mid_MsgQueue = osMessageQueueNew(MSGQUEUE_OBJECTS, 100, NULL); if (mid_MsgQueue == NULL) { printf("Falied to create Message Queue!\n"); } osThreadAttr_t attr; attr.attr_bits = 0U; attr.cb_mem = NULL; attr.cb_size = 0U; attr.stack_mem = NULL; attr.stack_size = 1024*10; attr.priority = 25; attr.name = "Thread_MsgQueue1"; if (osThreadNew(Thread_MsgQueue1, NULL, &attr) == NULL) { printf("Falied to create Thread_MsgQueue1!\n"); } attr.name = "Thread_MsgQueue2"; if (osThreadNew(Thread_MsgQueue2, NULL, &attr) == NULL) { printf("Falied to create Thread_MsgQueue2!\n"); }}第四:编译调试
修改BUILD.gn文件
修改 applications\BearPi\BearPi-HM_Nano\sample路径下 BUILD.gn 文件,指定 message_example 参与编译。
#"A1_kernal_thread:thread_example",#"A2_kernel_timer:timer_example",#"A3_kernel_event:event_example",#"A4_kernel_mutex:mutex_example",#"A5_kernel_semaphore:semaphore_example","A6_kernel_message:message_example",第五:运行结果
示例代码编译烧录代码后,按下开发板的RESET按键,通过串口助手查看日志,会打印从消息队列中获取的消息。
Message Queue Get msg:Hello BearPi-HM_Nano!Message Queue Get msg:Hello BearPi-HM_Nano!Message Queue Get msg:Hello BearPi-HM_Nano!Message Queue Get msg:Hello BearPi-HM_Nano!Message Queue Get msg:Hello BearPi-HM_Nano!
