【2022研电赛】兆易创新杯全国二等奖:自动驾驶汽车路面目标智能检测系统
本文为2022年第十七届中国研究生电子设计竞赛兆易创新杯全国二等奖作品分享,参加极术社区的【有奖活动】分享2022研电赛作品扩大影响力,更有丰富电子礼品等你来领!
团队介绍
参赛单位:Guangxi University of Science and Technology
参赛队伍:great rivers
参赛队员:Taylor,Rawat,Miracle
1. 作品简介
随着人工智能与计算机通信技术的不断发展,自动驾驶技术也越来越成熟。就目前的发展而言,自动驾驶技术仍然存在着一些技术性以及非技术性的问题。虽然自动驾驶汽车在正常环境下已经达到了不错的效果,但是在恶劣环境与恶劣天气中仍然对自动驾驶汽车的发展造成了挑战。为了提高自动驾驶汽车在恶劣环境下的识别能力,我们开发这套自动驾驶汽车智能检测系统,该系统主要针对自动驾驶汽车在恶劣环境下对路面目标的识别。
由于在恶劣环境中(比如雨、雾、雪、沙尘暴等天气)存在着能见度低、目标模糊等问题,导致误检、漏检等问题严重。因此我们设计了一种基于偏执补偿模型的自适应色阶算法来提升恶劣天气下图像的清晰度,同时我们通过对YOLOv5算法进行改进,通过消融实验对比,改进后的算法一定程度上提升了对目标的识别率,mAP达到了94.7%,FPS为199.86。最后为适应真实的应用场景,进一步提高对目标的检测率,建立了多源数据融合的决策模型,通过融合视觉相机和毫米波融合的方式进一步提高对目标的检测率,减轻恶劣天气对目标检测的影响。
实践证明,该技术在恶劣环境下能准确检测出目标车辆和行人,并且速度达到了实时的要求,在实际应用中减轻了恶劣天气对自动驾驶汽车的影响,从而保护了车辆人员的生命健康安全,减少了事故的发生。
2. 研究内容
(1)建立基于深度学习算法的数据识别训练系统平台。包括数据预处理和识别模型的生成。我们采用裁剪、平移、改变亮度、增加高斯噪声、调整旋转角度、镜像、与cutout的方法增强数据集。
(2)设计针对恶劣天气的基于偏执补偿模型的自适应色阶处理算法。
(3)在YOLOv5原始算法上进行改进,进一步提高对目标的识别率。
(4)对毫米波雷达与视觉相机进行标定,使坐标统一在世界坐标系下。建立多源数据融合的决策系统,通过结合毫米波雷达和视觉信息来提升恶劣天气下的路面目标识别能力。
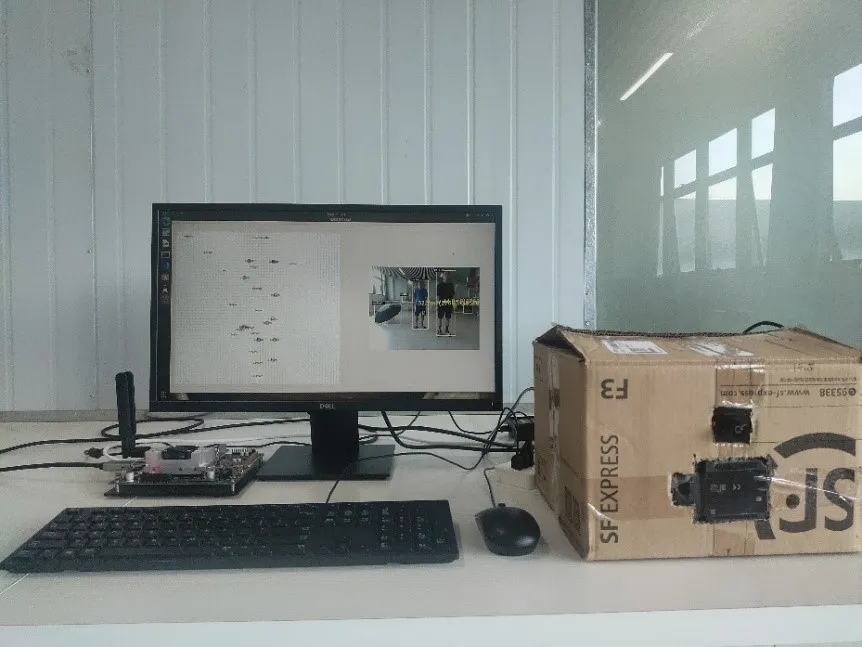
(5)开发基于 NVIDIA GPU 工控机的车载实时识别一体化平台,模拟自动驾驶汽车,将数据训练系统平台获得的模型导入工控机后,通过车载摄像头和毫米波雷达处理的融合信息,可实时识别路面信息,并在屏幕上实时显示。
3. 作品创新点
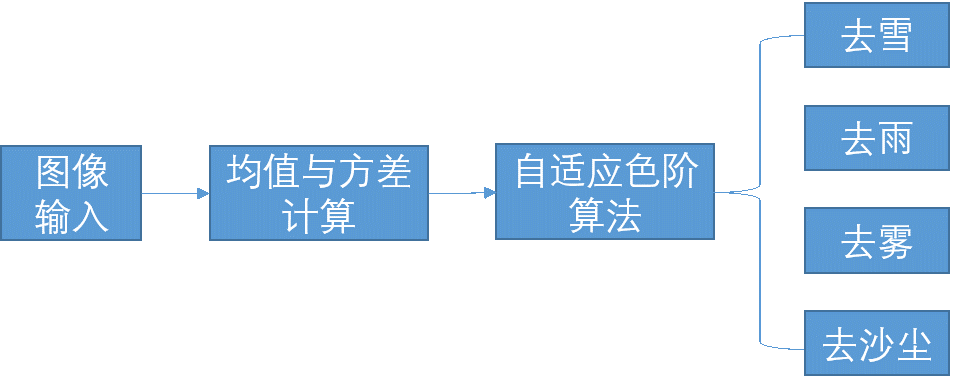
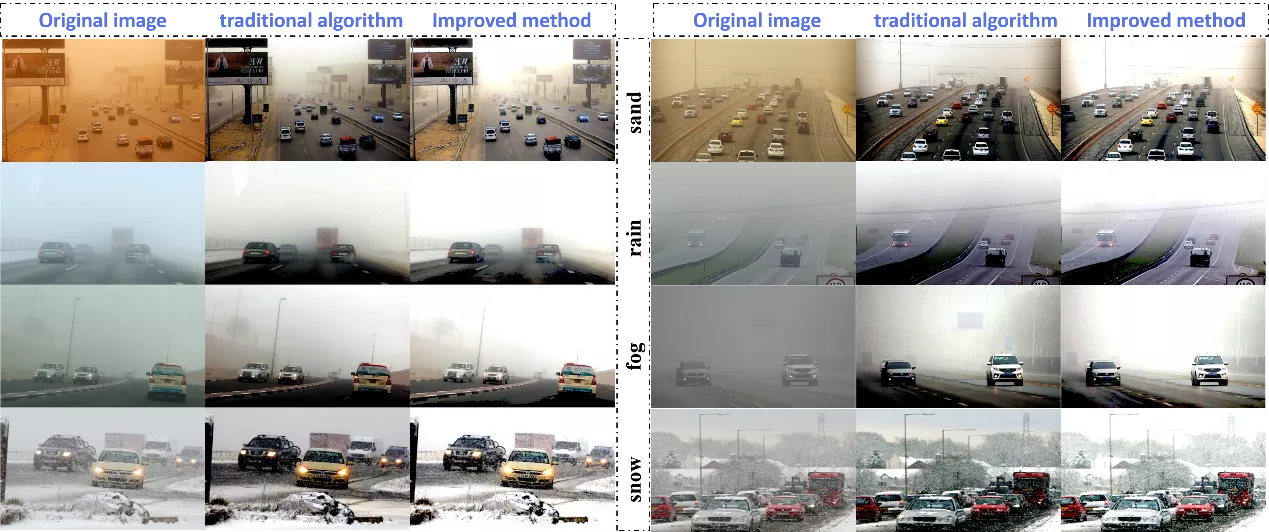
(1)设计了一种针对恶劣天气的基于偏执补偿模型的自适应色阶处理算法,该算法可以根据不同的天气情况(沙尘暴、雨、雪、雾)分别建立不同的处理通道对图像进行滤波,使输入图像更加清晰,有利于识别率的提升。
(2)设计了一种基于注意力机制与Transformer改进的YOLOv5目标检测算法,构建适用于恶劣天气下的智能识别模型,提高目标检测算法针对恶劣天气下目标的识别率。
(3)建立多源数据融合的决策模型,通过融合视觉相机和毫米波雷达接收到的外部信息,利用不同传感器的优点进行综合评判,有利于提升在恶劣天气下路面目标的识别能力。
4. 结果图展示
滤波算法实现流程
滤波算法改进前后对比图
传感器融合平台搭建
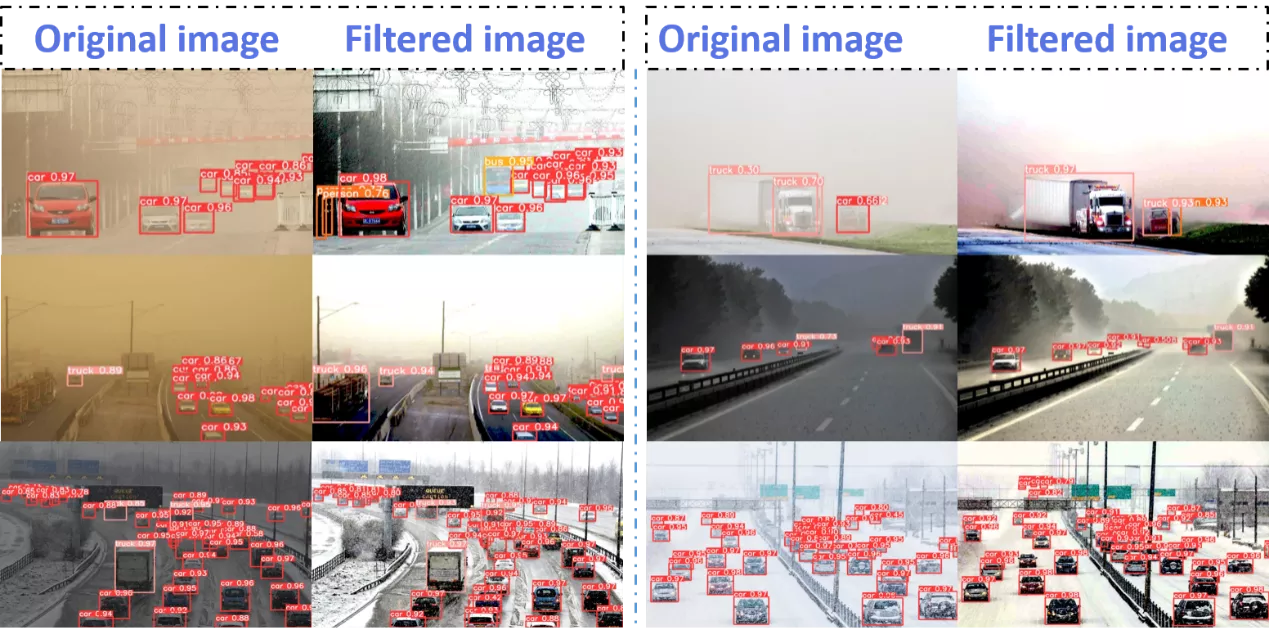
算法改进前后结果对比图
5. 总结
综上所述,我们主要研究如何提升自动驾驶汽车在恶劣环境下对路面目标的的识别率问题。本文首先使用增加高斯噪声、调整旋转角度、镜像与cutout等方式对数据集进行预处理操作,增加数据集的数量及多样性,提升检测效果同时避免过拟合。接着设计了一种基于偏执补偿模型的自适应色阶算法,该算法可以根据输入图像不同的均值和方差,自动分配预处理通道,对图像进行去雨、去雾、去雪和去沙尘等操作。并通过在YOLOv5原始算法上进行改进提高识别率。最后结合毫米波雷达和视觉相机的多源信息进行融合。在实验结果图中可以清楚的看到改进后的算法在恶劣环境下的识别能力有所提升。总体而言,本文的研究内容一定程度上提高了自动驾驶汽车在恶劣环境下的识别能力,达到了研究目的。
赶紧来参加极术社区组织的【有奖活动】分享2022研电赛作品扩大影响力,更有丰富电子礼品等你来领!,更多推广和礼品等你来领哦~

