【GD32F427开发板试用】-04-MPU6050在GD32F427上的移植(开源)
本篇文章来自极术社区与兆易创新组织的GD32F427开发板评测活动,更多开发板试用活动请关注极术社区网站。作者:申小林
前言
首先说一下,代码是根据正点原子的代码来移植的,先声明一个版权,然后上位机软件是用的匿名的四轴上位机,非常感谢他们贡献以及开源。
好了,首先说一下MPU6050是三轴陀螺仪+加速度的传感器,大家可以根据自己的需求和爱好来做移植或者更改,移植过程中出现了问题,也有试用群的给出主意。
效果图
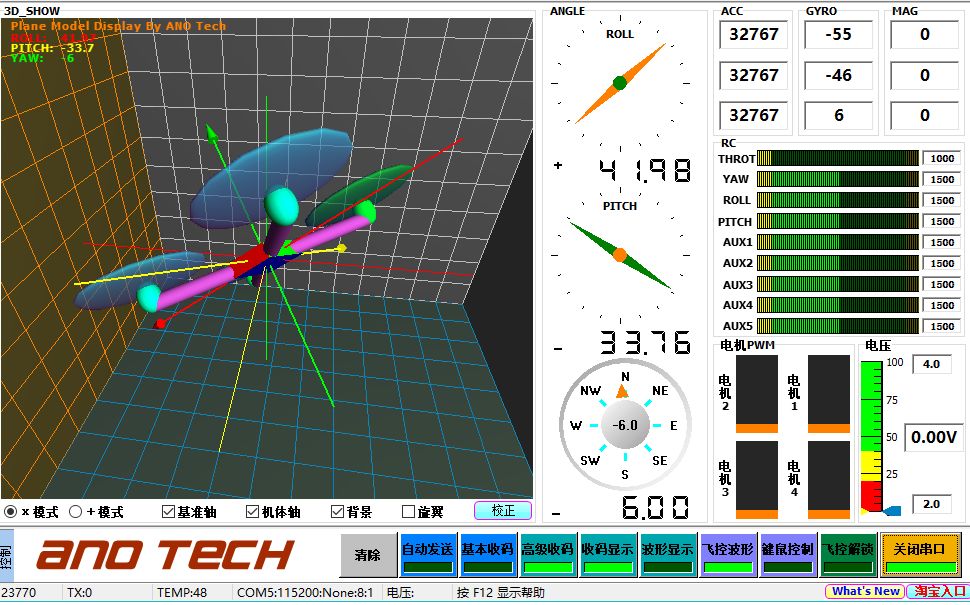
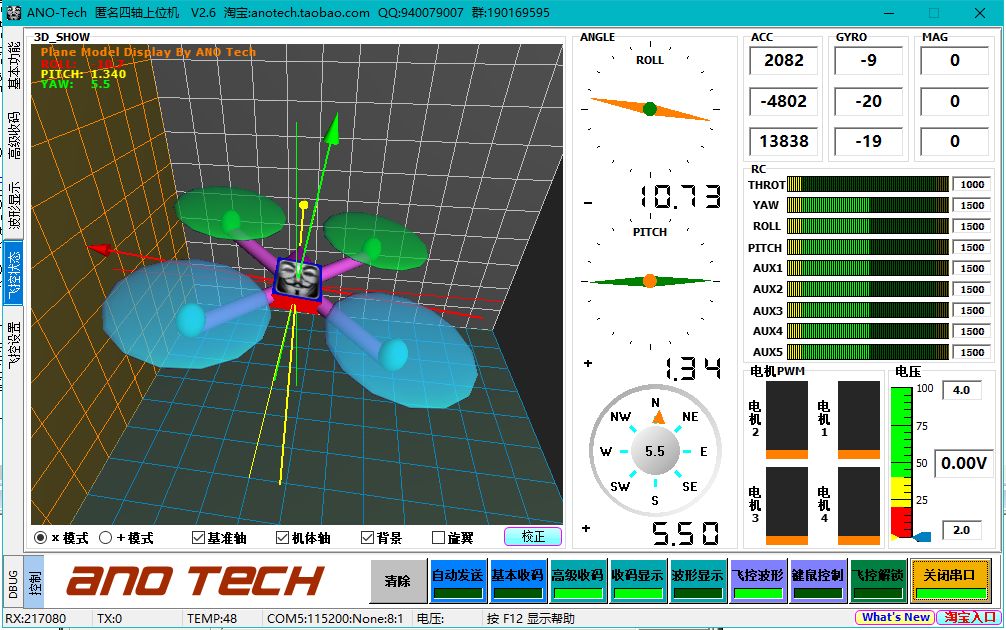
代码移植过程中需要避坑的是printf,需要可以直接注释掉。但是代码不是每次都会初始化成功,不是那么稳定,大佬有时间可以自己找一下原因。
代码
#include "gd32f4xx.h"#include "DRV_LED.h"#include "systick.h"#include "DRV_UART.h"#include "DRV_TIM1.h"//#include "mpu6050.h"#include "inv_mpu.h"#include "inv_mpu_dmp_motion_driver.h" /*! \brief main function \param[in] none \param[out] none \retval none*/ float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; //加速度传感器原始数据 short gyrox,gyroy,gyroz; //陀螺仪原始数据 short temp; //温度 //发送加速度传感器数据和陀螺仪数据//aacx,aacy,aacz:x,y,z三个方向上面的加速度值//gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值void usart1_send_char(unsigned char c){ usart_data_transmit(USART0,c); while(RESET == usart_flag_get(USART0, USART_FLAG_TC)); } //传送数据给匿名四轴上位机软件(V2.6版本)//fun:功能字. 0XA0~0XAF//data:数据缓存区,最多28字节!!//len:data区有效数据个数void usart1_niming_report(unsigned char fun,unsigned char*data,unsigned char len){ unsigned char send_buf[32]; unsigned char i; if(len>28) return; //最多28字节数据 send_buf[len+3]=0; //校验数置零 send_buf[0]=0X88; //帧头 send_buf[1]=fun; //功能字 send_buf[2]=len; //数据长度 for(i=0;i<len;i++)send_buf[3+i]=data[i]; //复制数据 for(i=0;i<len+3;i++) send_buf[len+3]+=send_buf[i]; //计算校验和 for(i=0;i>8)&0XFF; tbuf[1]=aacx&0XFF; tbuf[2]=(aacy>>8)&0XFF; tbuf[3]=aacy&0XFF; tbuf[4]=(aacz>>8)&0XFF; tbuf[5]=aacz&0XFF; tbuf[6]=(gyrox>>8)&0XFF; tbuf[7]=gyrox&0XFF; tbuf[8]=(gyroy>>8)&0XFF; tbuf[9]=gyroy&0XFF; tbuf[10]=(gyroz>>8)&0XFF; tbuf[11]=gyroz&0XFF; usart1_niming_report(0XA1,tbuf,12);//自定义帧,0XA1} //通过串口1上报结算后的姿态数据给电脑//aacx,aacy,aacz:x,y,z三个方向上面的加速度值//gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值//roll:横滚角.单位0.01度。 -18000 -> 18000 对应 -180.00 -> 180.00度//pitch:俯仰角.单位 0.01度。-9000 - 9000 对应 -90.00 -> 90.00 度//yaw:航向角.单位为0.1度 0 -> 3600 对应 0 -> 360.0度void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw){ unsigned char tbuf[28]; unsigned char i; for(i=0;i>8)&0XFF; tbuf[1]=aacx&0XFF; tbuf[2]=(aacy>>8)&0XFF; tbuf[3]=aacy&0XFF; tbuf[4]=(aacz>>8)&0XFF; tbuf[5]=aacz&0XFF; tbuf[6]=(gyrox>>8)&0XFF; tbuf[7]=gyrox&0XFF; tbuf[8]=(gyroy>>8)&0XFF; tbuf[9]=gyroy&0XFF; tbuf[10]=(gyroz>>8)&0XFF; tbuf[11]=gyroz&0XFF; tbuf[18]=(roll>>8)&0XFF; tbuf[19]=roll&0XFF; tbuf[20]=(pitch>>8)&0XFF; tbuf[21]=pitch&0XFF; tbuf[22]=(yaw>>8)&0XFF; tbuf[23]=yaw&0XFF; usart1_niming_report(0XAF,tbuf,28);//飞控显示帧,0XAF} int main(void){ unsigned char Data[]={"this is a UART0 Test Demo! " }; systick_config(); LED_Init(); UART_Init(); Time1_Init(); UART0_Transmit(Data,sizeof(Data)); //---- MPU_Init(); //初始化MPU6050 mpu_dmp_init(); while(1) { if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0) { MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据 mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定义帧发送加速度和陀螺仪原始数据 usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10)); } delay_1ms(20); }}网站没法上传代码,不然我就把工程打包好,传上来了。
驱动修改过的代码也发上来吧,做个参考
#include "mpuiic.h"// //本程序只供学习使用,未经作者许可,不得用于其它任何用途//ALIENTEK精英STM32开发板V3//MPU6050 IIC驱动 代码//正点原子@ALIENTEK//技术论坛:www.openedv.com//创建日期:2015/1/17//版本:V1.0//版权所有,盗版必究。//Copyright(C) 广州市星翼电子科技有限公司 2009-2019//All rights reserved // //MPU IIC 延时函数void MPU_IIC_Delay(void){ int i=0; for(i=0;i250) { MPU_IIC_Stop(); return 1; } } MPU_IIC_SCL_L;//时钟输出0 return 0; } //产生ACK应答void MPU_IIC_Ack(void){ MPU_IIC_SCL_L; MPU_SDA_OUT(); MPU_IIC_SDA_L; MPU_IIC_Delay(); MPU_IIC_SCL_H; MPU_IIC_Delay(); MPU_IIC_SCL_L;}//不产生ACK应答 void MPU_IIC_NAck(void){ MPU_IIC_SCL_L; MPU_SDA_OUT(); MPU_IIC_SDA_H; MPU_IIC_Delay(); MPU_IIC_SCL_H; MPU_IIC_Delay(); MPU_IIC_SCL_L;}//IIC发送一个字节//返回从机有无应答//1,有应答//0,无应答void MPU_IIC_Send_Byte(unsigned char txd){unsigned char t;MPU_SDA_OUT(); MPU_IIC_SCL_L;//拉低时钟开始数据传输 for(t=0;t>7; if((txd&0x80)>>7) { MPU_IIC_SDA_H; } else { MPU_IIC_SDA_L; } txd<<=1; MPU_IIC_SCL_H; MPU_IIC_Delay(); MPU_IIC_SCL_L; MPU_IIC_Delay(); } } //读1个字节,ack=1时,发送ACK,ack=0,发送nACK unsigned char MPU_IIC_Read_Byte(unsigned char ack){ unsigned char i,receive=0; MPU_SDA_IN();//SDA设置为输入 for(i=0;i<8;i++ ) { MPU_IIC_SCL_L; MPU_IIC_Delay(); MPU_IIC_SCL_H; receive<<=1; if(MPU_READ_SDA)receive++; MPU_IIC_Delay(); } if (!ack) MPU_IIC_NAck();//发送nACK else MPU_IIC_Ack(); //发送ACKreturn receive;}视频演示
https://www.bilibili.com/video/BV1m14y1J7Xrwww.bilibili.com/video/BV1m14y1J7Xr
好啦,先分享到这里。

