相机校准和3D重建9-计算基本矩阵1
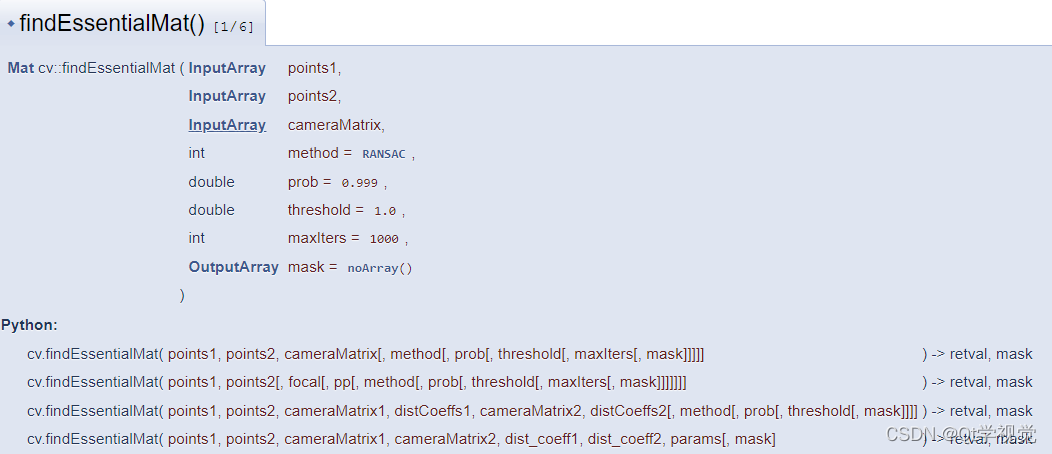
Mat cv::findEssentialMat(InputArray points1, InputArray points2, InputArray cameraMatrix, int method = RANSAC, double prob = 0.999, double threshold = 1.0, int maxIters = 1000, OutputArray mask = noArray() )points1 :来自第一张图像的 N (N >= 5) 个二维点的数组。 点坐标应该是浮点数(单精度或双精度)。
points2 :与 points1 大小和格式相同的第二个图像点的数组。
cameraMatrix:相机内在矩阵 A=

