【OpenHarmony应用开发】分布式相机
分布式相机
简介
分布式相机是多个设备的相机同时协同使用的能力。分布式相机组件是为分布式硬件子系统提供这一能力的组件。本组件不直接对接应用,只向分布式硬件框架子系统提供C++接口。应用可以通过相机框架的接口使用分布式相机组件操作其他设备的Camera,使用方式与本地相机一致。
其系统架构图如下图所示:
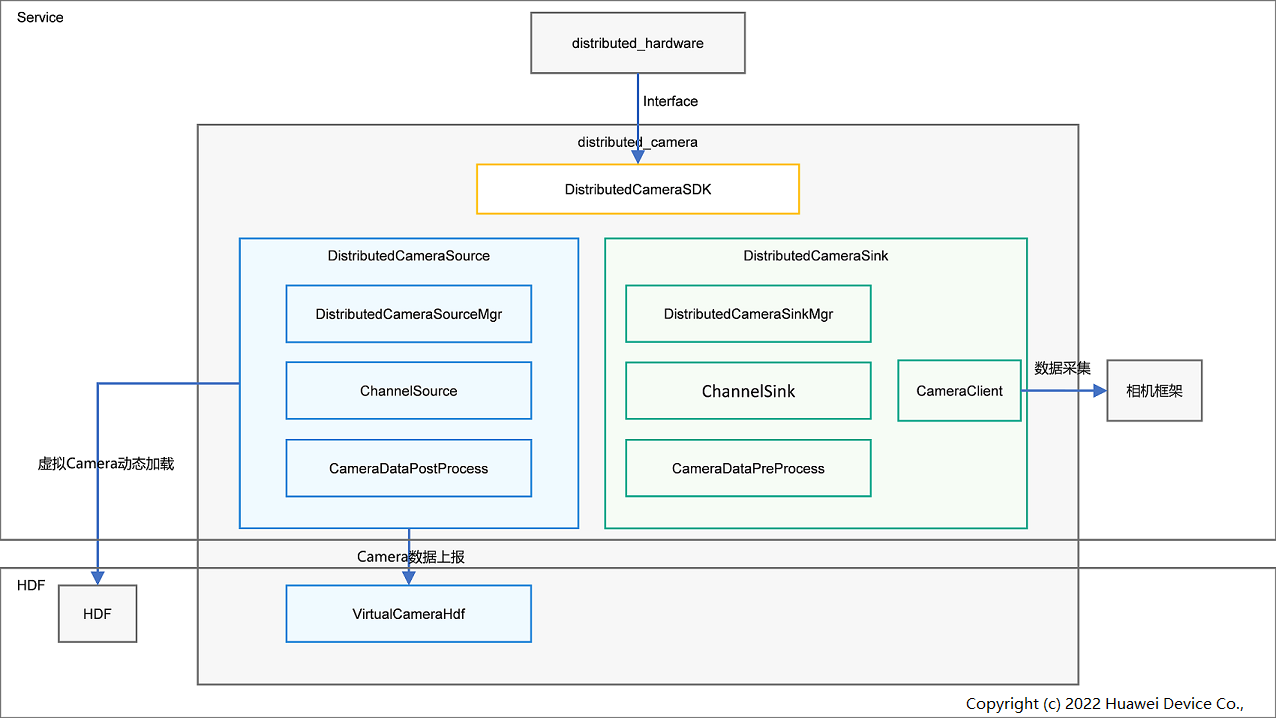
分布式相机接口(DistributedCameraSDK):为分布式硬件管理框架提供超级终端虚拟Camera使能/去使能能力,以及相机状态。
分布式相机主控端生命周期管理(DistributedCameraSourceMgr):通过状态机管理主控端Camera状态,负责主控端相关对象的创建销毁,以及两端的参数协商。
分布式相机被控端生命周期管理(DistributedCameraSinkMgr):管理被控端Camera状态,负责被控端相关对象的创建销毁,以及两端的参数协商。
通道模块(Channel):通过软总线连接主控端与被控端,接收发送主控端的相机指令或被控端的图像信息。
数据处理器(DataProcess):对相机框架返回的图像数据做处理(编解码、色彩空间转换、分辨率缩放、帧率调整,角度调整等)。
分布式相机客户端(CameraClient):被控端调用多媒体接口查询操作本地相机(查询相机数量及相关信息;打开、关闭、获取流等操作)。
虚拟相机HDF层实现(VirtualCameraHdf):在HDF层建立的虚拟Camera硬件,能够被多媒体框架发现和加载,像使用本地的Camera一样被使用
目录
/foundation/distributedhardware/distributedcamera├── camera_hdf # 分布式相机HAL功能├── common # 分布式相机公共模块├── interfaces # 分布式相机对外接口模块├── sa_profile # 分布式相机SA配置模块├── services # 服务模块│ └── cameraservice # 相机服务模块│├── base # 分布式相机两端公共部分│├── cameraoperator # 分布式相机相机操作模块│├── sinkservice # 分布式相机被控端服务模块│└── sourceservice # 分布式相机主控端服务模块│ ├── channel# 分布式相机通道模块│ └── data_process # 分布式相机数据处理模块约束
语言限制:C++语言。
组网环境:必须确保设备在同一个局域网中。
操作系统限制:OpenHarmony操作系统。
说明
概念说明
主控端(source):控制端,通过调用分布式相机能力,使用被控端的摄像头进行预览、拍照、录像等功能。
被控端(sink):被控制端,通过分布式相机接收主控端的命令,使用本地摄像头为主控端提供图像数据。
Metadata:又叫元数据,是用于控制相机各种属性的参数。
接口说明
分布式相机组件实现分布式硬件管理框架提供的接口,分布式硬件管理框架统一调用接口实现虚拟硬件驱动注册等功能。
场景说明
被控端设备上线之后,主控端可以使能该设备相机并像使用本地相机一样使用被控端相机,直到被控端设备下线。
流程说明
1. 设备开机启动
系统拉起分布式相机的SA服务,Source侧被初始化,相关模块被初始化。
2. 设备组网上线
设备上线后,分布式硬件管理框架同步到上线设备的相机硬件信息并使能,使能成功后在系统中会新增分布式相机驱动并通知到相机框架,相机框架统一管理本地相机和分布式相机驱动;上层应用通过相机框架接口可以查询到分布式相机,并按照和本地相机相同的接口使用分布式相机。
3. 设备下线
设备下线后,分布式硬件管理框架去使能下线设备的相机硬件,本地移除分布式相机驱动并通知到相机框架,此时下线设备的分布式相机不可用。

