Far planner 代码系列 (34)路径规划(一)
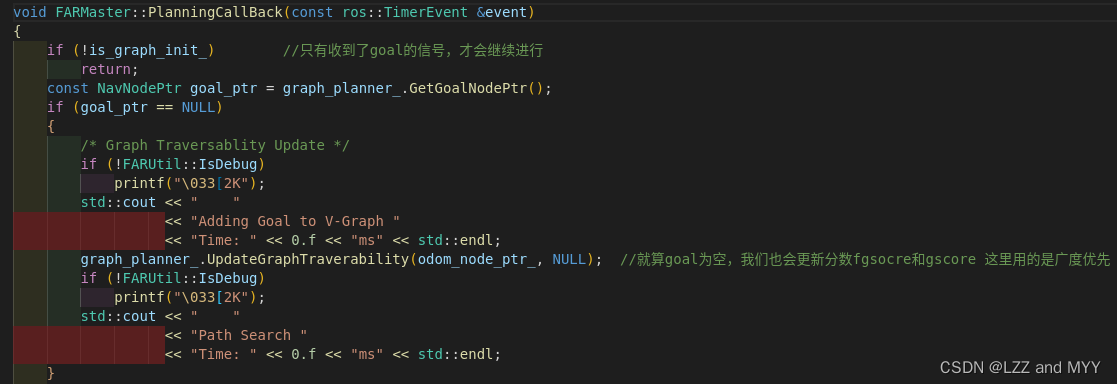
当系统正在运行的时候,每次进行ros spinonce 它都会调用PlanningCallBack函数,在这个函数没有接收到goal目标的时候,它会先进行通行区域的更新,也就是计算fgscore和gscore
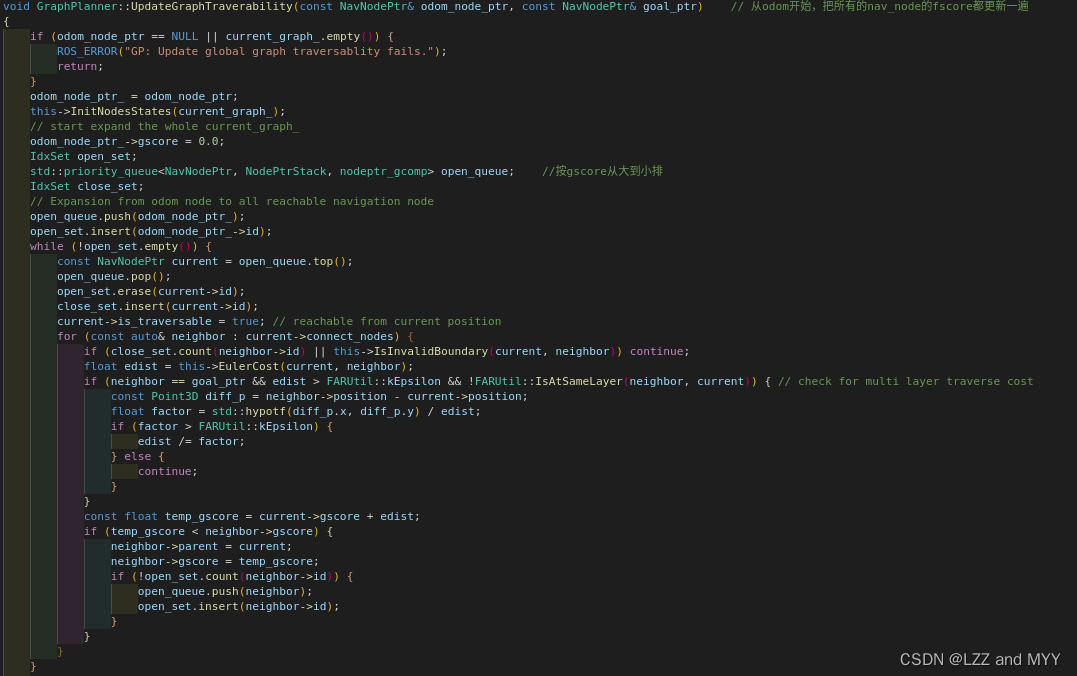
我们进入UpdateGraphTraverability函数,它主要分为两个部分:
第一个是针对odom,拓展到所有的nav_node,我们计算gscore,并更新当前cur_graph的gscore值和nav_node的父节点parent,这里用到的是广度优先算法,正如作者论文里提到的,我们先选择odom,然后遍历它的所有connect_nodes,更新open_set,在取出connect_nodes的connect_nodes,一直遍历直到所有点都进入close_set即完成。
第二部分是更新fgscore,这个只针对node属性里is_covered为true的nav_node,所以并不是所有的nav_node都有fgscore。对于有fgscore的nav_node,我们称它的父节点为free_parent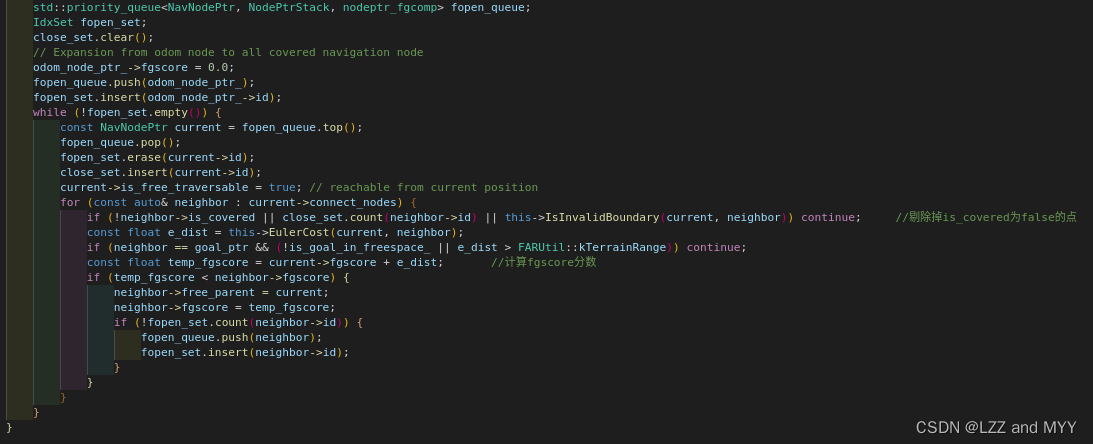
当我们发送goal命令的时候,ros接收到槽信号,进行ros spinonce的时候,就会跳转到WaypointCallBack函数。
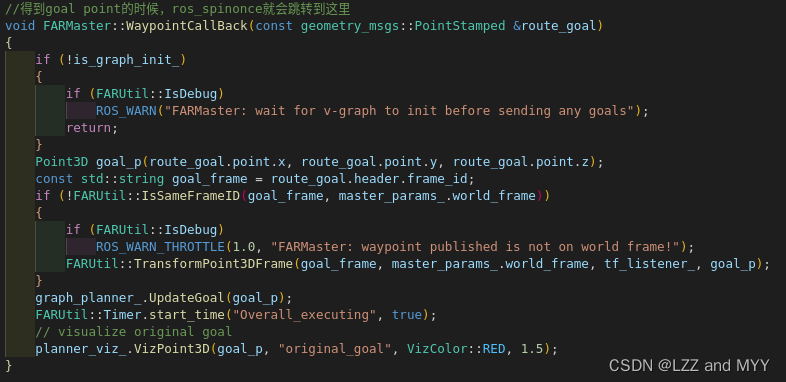
函数最主要的部分就是UpdateGoal,它将更新我们的goal点。
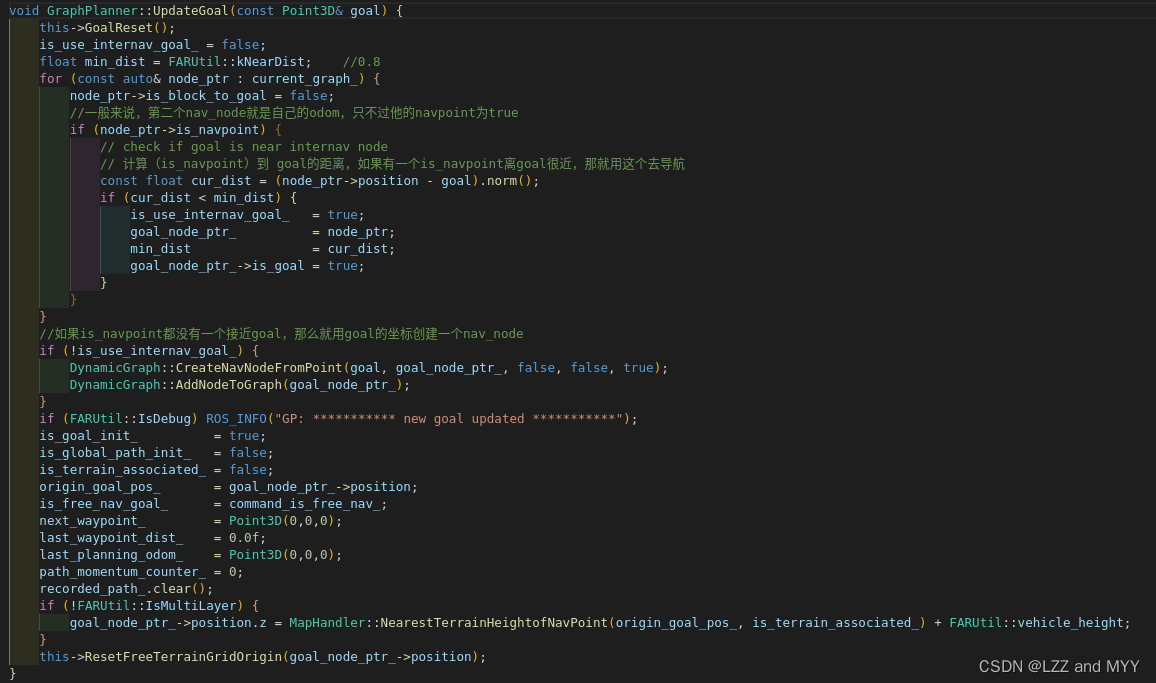
我们可以看到,首先遍历现有的graph,判断traj里的node是否有离goal非常近的(这个一般都没有用到~)如果有,那么我们就用该traj_node来进行导航(设为终点),如果没有,我们就新建立一个goal_node,并把该node加入graph中。
在经过一个ros spinonce,我们再次进入PlanningCallBack函数,这回我们就会往下进行了:
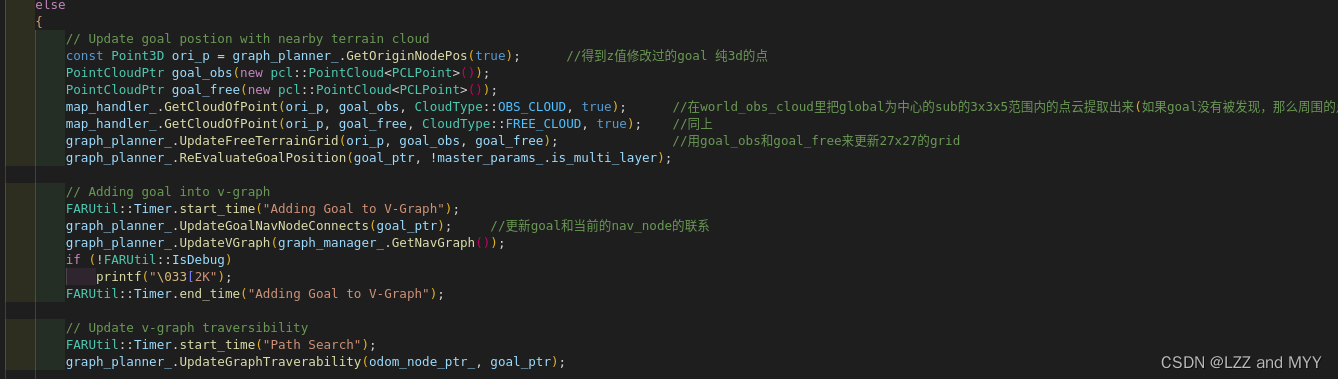
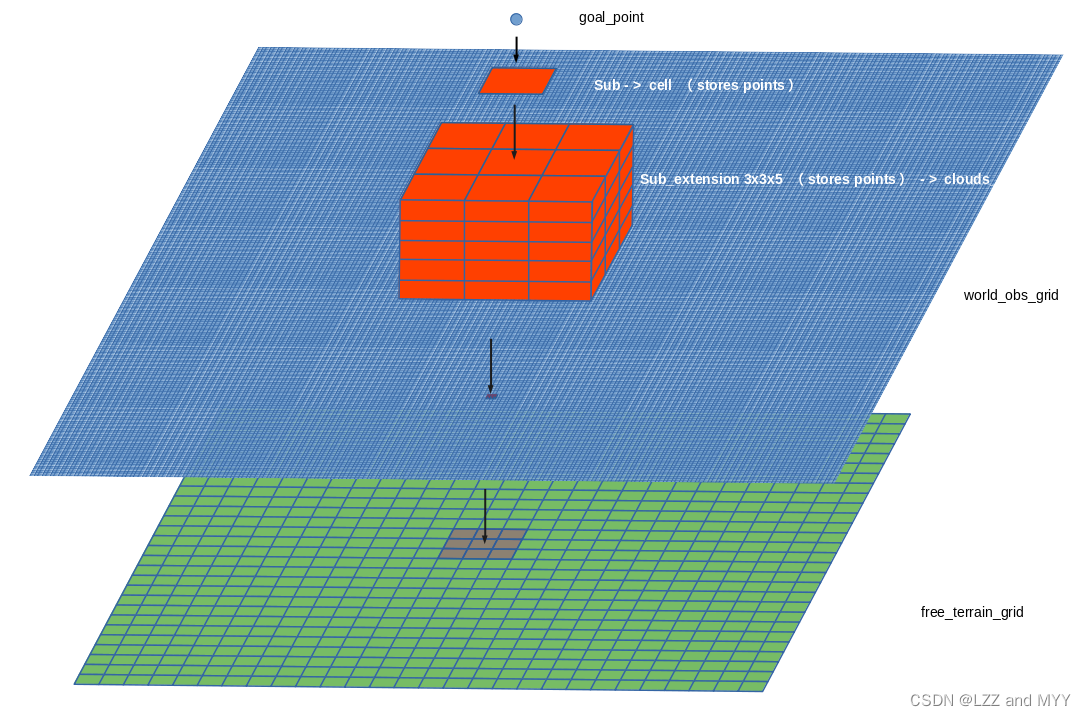
我们把goal在world_obs_grid下的sub取出,并以该sub为中心建立一个3x3x5的sub体块,将该体块内部的点云提取出来。如下图所示:
至于为什么是3x3x5的体块,我想原本单个sub就已经足够了,原因如下:
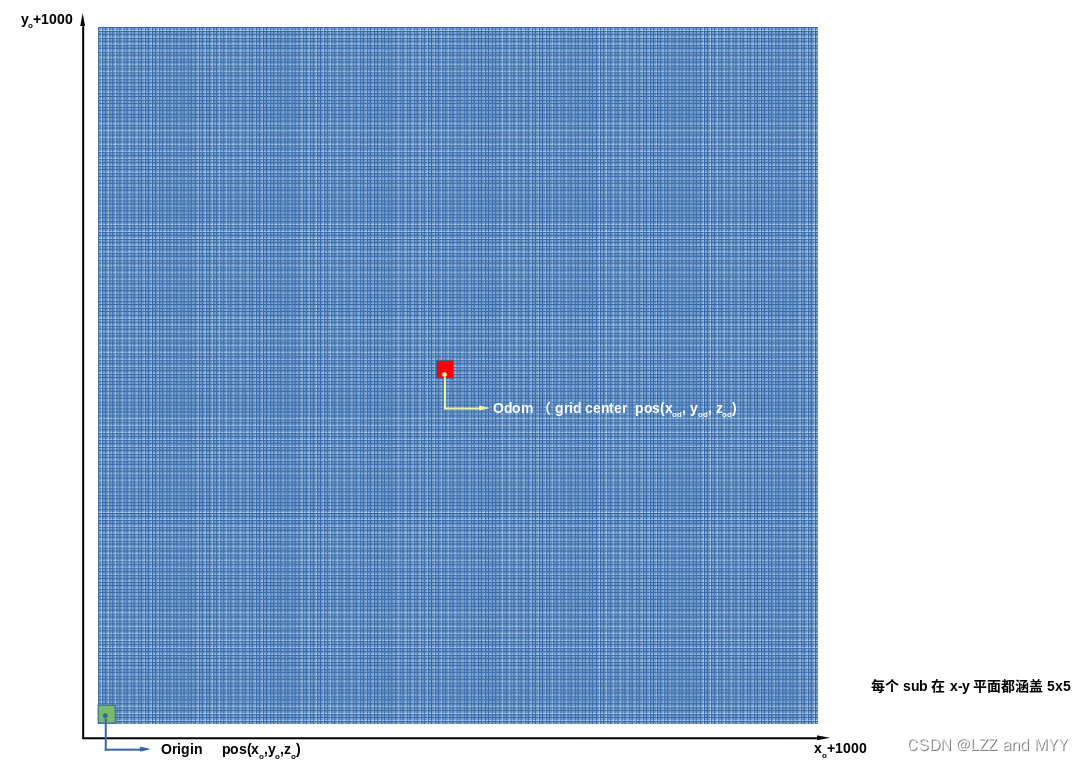
在建立world_obs_cloud_grid的时候,我们是按200x200x125这个来建立的,而它的缩放系数为(5,5,0.8),如果以odom(,
,
)为准,它建立的一个grid就如下图所示,其中心为odom,起点为Origin,每个sub占5x5x0.8的距离。
在建立free_terrain_grid的时候,如下图所示,由于该grid大小为27x27x1,缩放比率为(0.15,0.15,0.15),其实总长度也就4x4,对于world_obs_cloud_grid下的一个sub就有5x5应该是绰绰有余了。
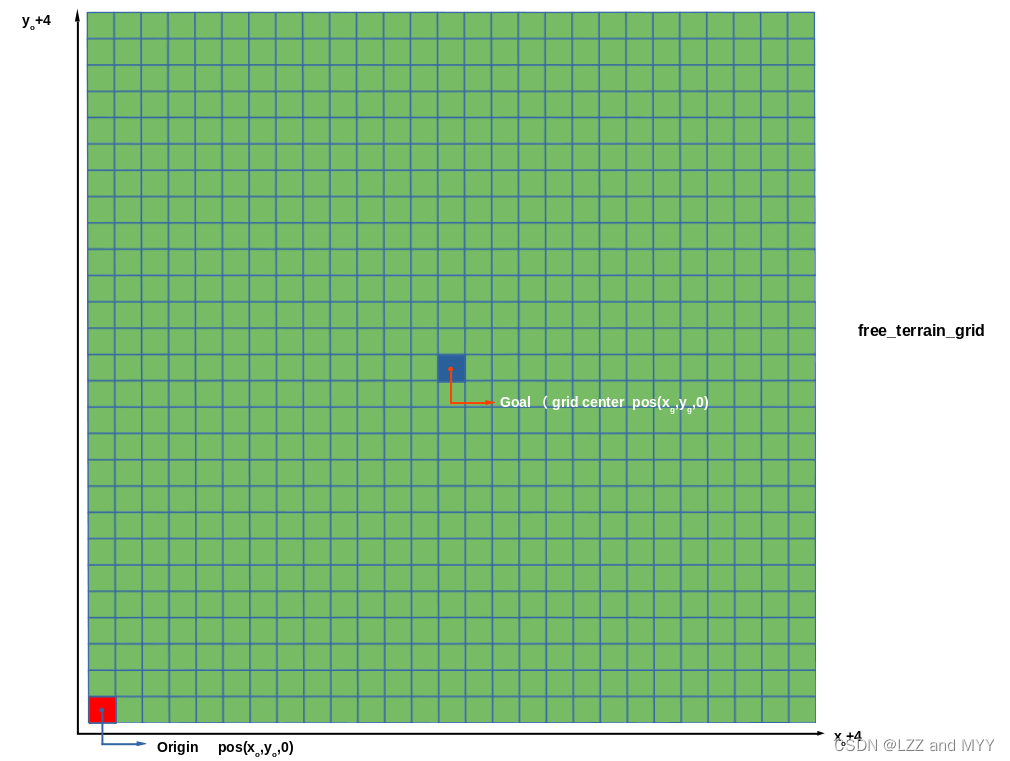
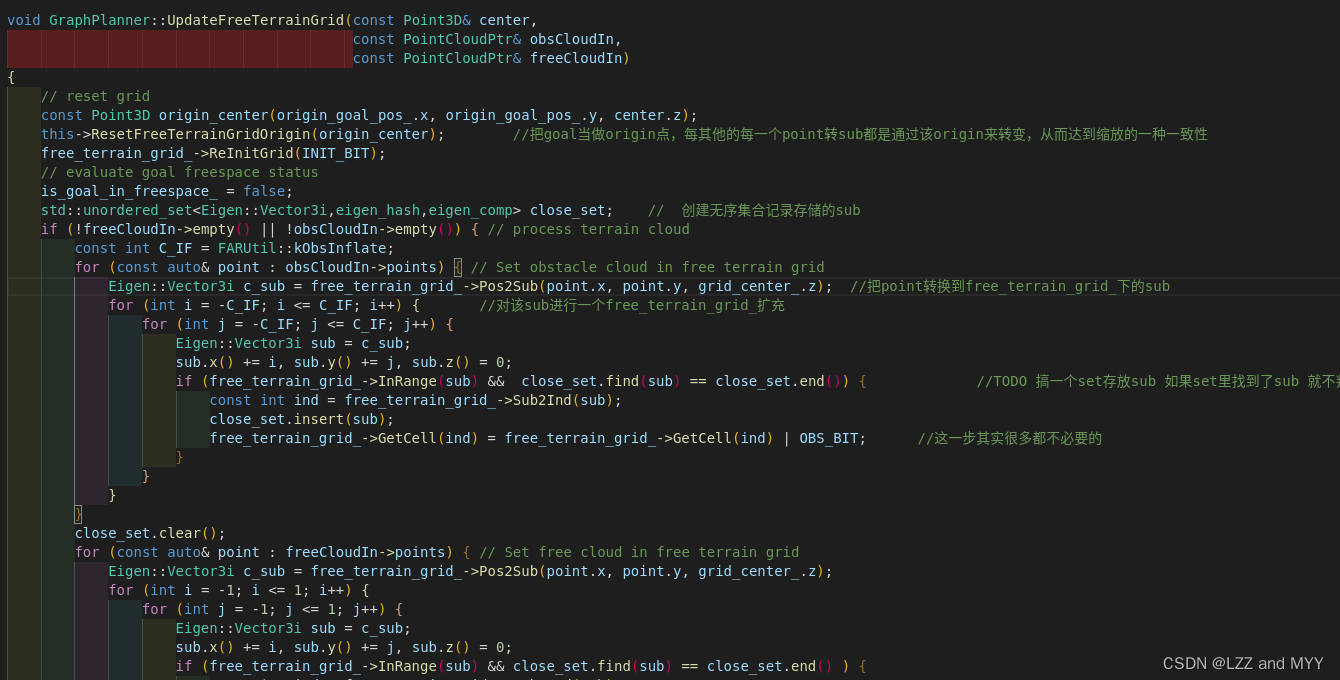
言归正传,我们获取到了goal_node周围的free和obs点云信息后,就用来更新我们的free_terrain_grid。我们把goal_node当做该grid的中心点,用该中心点去重置grid的origin
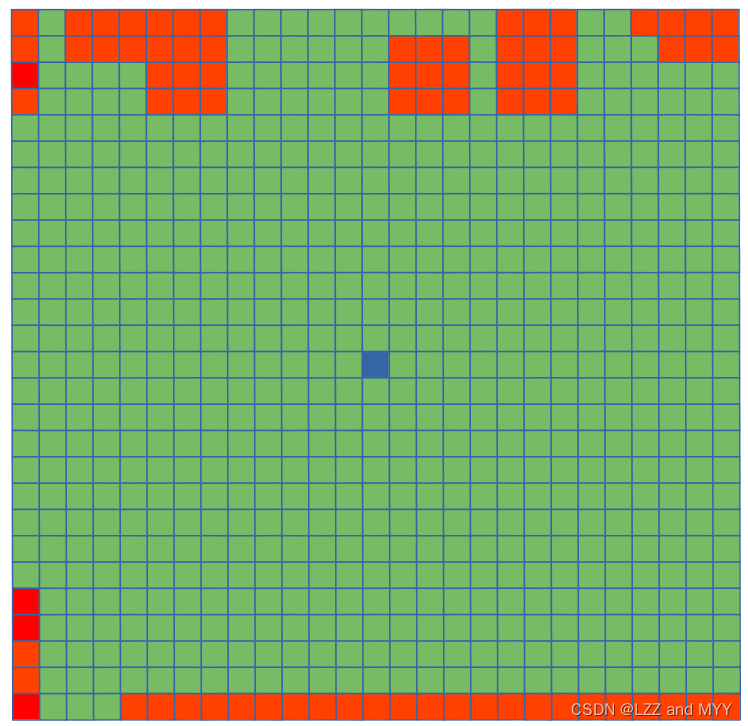
更新完后,示意图如下图所示,其中红色为障碍物的sub,蓝色为goal目标点的sub:
未完待续~