【GD32F310开发板试用】DS18B20数字温度传感器的读取
首发极术社区。如对兆易创新GD32F310 MCU感兴趣,欢迎添加微信 aijishu2020 加入GD32技术讨论群。
有幸获得兆易创新的开发板GD32F310的试用机会,这次就用一个GPIO来读取数字温度传感器DS18B20,以“一线总线”数字方式输出,os用的rtthread nano。
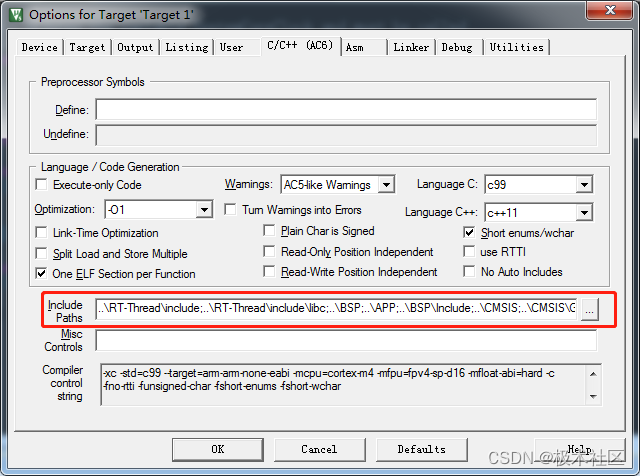
首先移植rtthread nano,我使用的nano版本不是最新的,是3.1.3,建立工程架构以及添加头文件路径

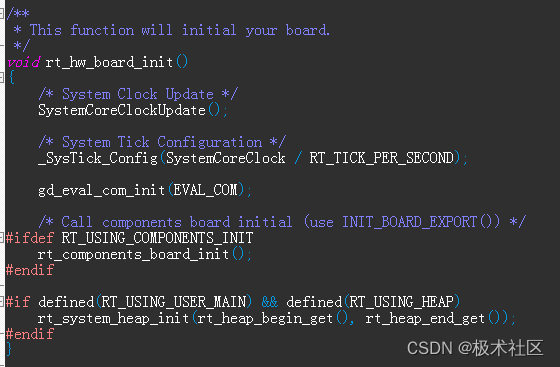
修改一些配置,nvic_vector_table_set的定义和finsh所需要的串口的配置
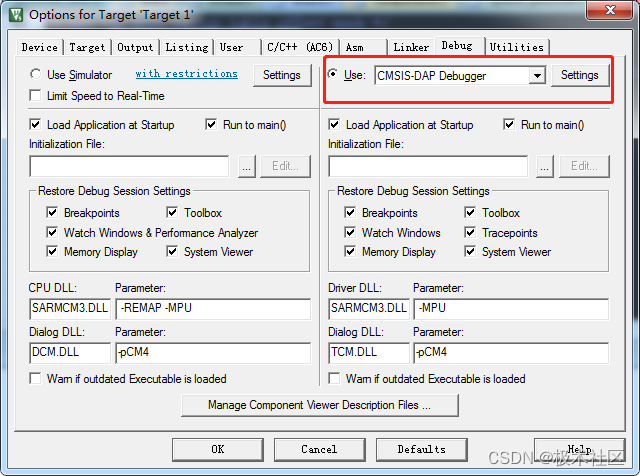
void gd_eval_com_init(uint32_t com){ uint32_t COM_ID = 0U; if(EVAL_COM == com){ COM_ID = 0U; }else{ } /* enable COM GPIO clock */ rcu_periph_clock_enable(EVAL_COM_GPIO_CLK); /* enable USART clock */ rcu_periph_clock_enable(COM_CLK[COM_ID]); /* connect port to USARTx_Tx */ gpio_af_set(EVAL_COM_GPIO_PORT, EVAL_COM_AF, COM_TX_PIN[COM_ID]); /* connect port to USARTx_Rx */ gpio_af_set(EVAL_COM_GPIO_PORT, EVAL_COM_AF, COM_RX_PIN[COM_ID]); /* configure USART Tx as alternate function push-pull */ gpio_mode_set(EVAL_COM_GPIO_PORT, GPIO_MODE_AF, GPIO_PUPD_PULLUP, COM_TX_PIN[COM_ID]); gpio_output_options_set(EVAL_COM_GPIO_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_10MHZ, COM_TX_PIN[COM_ID]); /* configure USART Rx as alternate function push-pull */ gpio_mode_set(EVAL_COM_GPIO_PORT, GPIO_MODE_AF, GPIO_PUPD_PULLUP, COM_RX_PIN[COM_ID]); gpio_output_options_set(EVAL_COM_GPIO_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_10MHZ, COM_RX_PIN[COM_ID]); /* USART configure */ usart_deinit(com); usart_baudrate_set(com, 115200U); usart_receive_config(com, USART_RECEIVE_ENABLE); usart_transmit_config(com, USART_TRANSMIT_ENABLE); usart_enable(com);} //实现该函数,才能使用rt_kprintfvoid rt_hw_console_output(const char *str) { /* 进入临界段 */ rt_enter_critical(); while(*str!='\0') { /* 换行 */ if (*str == '\n')//RT-Thread 系统中已有的打印均以 \n 结尾,而并非 \r\n,所以在字符输出时,需要在输出 \n 之前输出 \r,完成回车与换行,否则系统打印出来的信息将只有换行 { usart_data_transmit(USART0, '\r'); while(usart_flag_get(USART0, USART_FLAG_TC)== RESET); } usart_data_transmit(USART0, *(str++)); while(usart_flag_get(USART0, USART_FLAG_TC)== RESET); } /* 退出临界段 */ rt_exit_critical(); //注意:使用进入临界段语句rt_enter_critical(); 一定要使用退出临界段语句 rt_exit_critical();否则调度器锁住,无法进行调度}//使用Finsh组件三步骤:1.实现该函数及rt_hw_console_output函数;2.rtconfig.h中开启RT_USING_FINSH宏;3.添加Finsh组件(cmd.c、msh.c、shell.c),char rt_hw_console_getchar(void){ //查询方式实现,记得将Usart1初始化中的中断接收配置相关代码注释掉 int ch = -1; /*等待串口1输入数据*/ if(usart_flag_get(USART0, USART_FLAG_RBNE) != RESET) { ch = (int)usart_data_receive(USART0); usart_flag_clear(USART0, USART_FLAG_RBNE); } else { if(usart_flag_get(USART0, USART_FLAG_ORERR) != RESET) { usart_flag_clear(USART0, USART_FLAG_ORERR); } rt_thread_mdelay(10); } return ch;}main函数创建一个led线程#include #include #include "gd32f3x0_rcu.h"#include "gd32f3x0_gpio.h"#include "Uart.h"static rt_thread_t led_thread;void led_init(void){ /* enable the LED GPIO clock */ rcu_periph_clock_enable(RCU_GPIOA); /* configure led GPIO port */ gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_8); gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);}void led_thread_entry(void *parameter){ led_init(); while(1) { /* turn on led */ gpio_bit_write(GPIOA, GPIO_PIN_8, SET); rt_thread_mdelay(2000); /* turn off led */ gpio_bit_write(GPIOA, GPIO_PIN_8, RESET); rt_thread_mdelay(2000); }}void TaskInit(void){ led_thread = rt_thread_create("ledThread", /* 线程名字 */ led_thread_entry, /* 线程入口函数 */ RT_NULL, /* 线程入口函数参数 */ 256, /* 线程栈大小 */ 2, /* 线程的优先级 */ 10 /* 线程时间片 */ ); if(led_thread != RT_NULL) { rt_thread_startup(led_thread); }}int main(){ TaskInit();}用GDlink下载代码,用finsh可查看led线程创建成功。
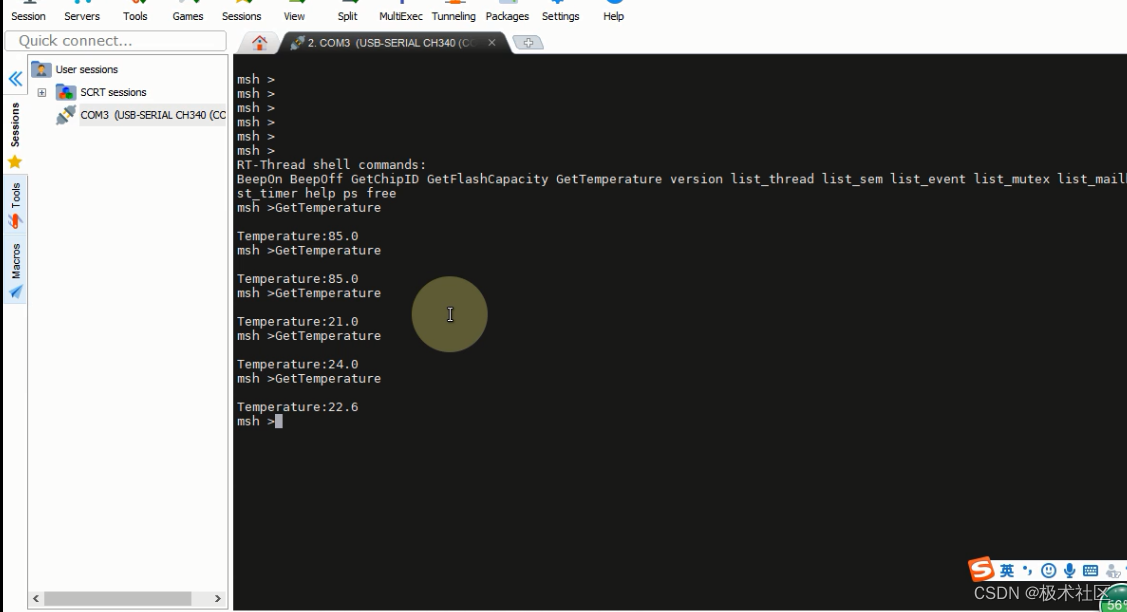
同样地,再创建一个ds18b20的读取任务,ds18b20的温度读取流程:复位->发 SKIP ROM 命令(0XCC)->发开始转换命令(0X44)->延时->复位->发送 SKIP ROM 命令(0XCC)->发读存储器命令(0XBE)->连续读出两个字节数据(即
温度)->结束。
贴出部分关键代码
/* *主机给从机发送复位脉冲 */static void DS18B20_Rst(void){ /* 主机设置为推挽输出 */ DS18B20_Mode_Out_PP(); macDS18B20_DQ_0; /* 主机至少产生480us的低电平复位信号 */ rt_hw_us_delay(750); /* 主机在产生复位信号后,需将总线拉高 */ macDS18B20_DQ_1; /*从机接收到主机的复位信号后,会在15~60us后给主机发一个存在脉冲*/ rt_hw_us_delay(15);}/* * 检测从机给主机返回的存在脉冲 * 0:成功 * 1:失败 */static uint8_t DS18B20_Presence(void){ uint8_t pulse_time = 0; /* 主机设置为上拉输入 */ DS18B20_Mode_IPU(); /* 等待存在脉冲的到来,存在脉冲为一个60~240us的低电平信号 * 如果存在脉冲没有来则做超时处理,从机接收到主机的复位信号后,会在15~60us后给主机发一个存在脉冲 */ while( macDS18B20_DQ_IN() && pulse_time=100 ) return 1; else pulse_time = 0; /* 存在脉冲到来,且存在的时间不能超过240us */ while( !macDS18B20_DQ_IN() && pulse_time=240 ) return 1; else return 0;}/* * 从DS18B20读取一个bit */static uint8_t DS18B20_ReadBit(void){ uint8_t dat; /* 读0和读1的时间至少要大于60us */ DS18B20_Mode_Out_PP(); /* 读时间的起始:必须由主机产生 >1us <15us 的低电平信号 */ macDS18B20_DQ_0; rt_hw_us_delay(10); /* 设置成输入,释放总线,由外部上拉电阻将总线拉高 */ DS18B20_Mode_IPU(); //rt_hw_us_delay(2); if( macDS18B20_DQ_IN() == SET ) dat = 1; else dat = 0; /* 这个延时参数请参考时序图 */ rt_hw_us_delay(45); return dat;}/* * 从DS18B20读一个字节,低位先行 */static uint8_t DS18B20_ReadByte(void){ uint8_t i, j, dat = 0; for(i=0; i<8; i++) { j = DS18B20_ReadBit(); dat = (dat) | (j<<i); } return dat;}/* * 写一个字节到DS18B20,低位先行 */static void DS18B20_WriteByte(uint8_t dat){ uint8_t i, testb; DS18B20_Mode_Out_PP(); for( i=0; i>1; /* 写0和写1的时间至少要大于60us */ if (testb) { macDS18B20_DQ_0; /* 1us < 这个延时 < 15us */ rt_hw_us_delay(8); macDS18B20_DQ_1; rt_hw_us_delay(58); } else { macDS18B20_DQ_0; /* 60us < Tx 0 < 120us */ rt_hw_us_delay(70); macDS18B20_DQ_1; /* 1us < Trec(恢复时间) 正 1->负-------|-----------整数-----------| * 高字节 | s | s | s | s | s | 2^6 | 2^5 | 2^4 | * * * 温度 = 符号位 + 整数 + 小数*0.0625 */ / * @brief 在跳过匹配 ROM 情况下获取 DS18B20 温度值 * @param 无 * @retval 温度值 */float DS18B20_GetTemp_SkipRom ( void ){ uint8_t tpmsb, tplsb; short s_tem; float f_tem; DS18B20_SkipRom (); DS18B20_WriteByte(0X44); /* 开始转换 */ DS18B20_SkipRom (); DS18B20_WriteByte(0XBE); /* 读温度值 */ tplsb = DS18B20_ReadByte(); tpmsb = DS18B20_ReadByte(); s_tem = tpmsb<<8; s_tem = s_tem | tplsb; if( s_tem < 0 ) /* 负温度 */ f_tem = (~s_tem+1) * 0.0625; else f_tem = s_tem * 0.0625; return f_tem; }