【MM32F5270开发板试用】RT-Thread SPI 驱动适配指南
本篇文章来自极术社区与灵动组织的MM32F5270开发板评测活动,更多开发板试用活动请关注极术社区网站。作者:xusiwei1236
本文记录了我在社区“Rice我叫加饭?”大佬移植的RT-Thread系统源码基础上,为MM32F5370开发板添加SPI驱动支持的过程。适配完成后,我使用W25Q128模组对SPI驱动的正确性进行了验证。这是我第一次给RT-Thread添加芯片SPI驱动,本文试图尽可能详细的描述整个适配过程。希望初学者通过阅读本文,能够复现本文描述的整个过程,或者参考本文可以为其他芯片添加RT-Thread SPI驱动支持。
drv_spi.h
目前RT-Thread的bsp中,STM32驱动貌似是最为完整的。因此,决定开始MM32F5270的RT-Thread SPI驱动适配后,我首先参考了RT-Thread主仓STM32 BSP下面的drv_spi.c和drv_spi.h文件。
rt_hw_spi_device_attach接口声明
首先是drv_spi.h文件,它需要向外部提供一个rt_hw_spi_device_attach接口。该用于附加一个SPI设备到SPI总线上,并将SPI设备的片选GPIO端口和pin脚编号传入。函数声明如下:
rt_err_t rt_hw_spi_device_attach(const char *bus_name, const char *device_name, GPIO_Type *cs_gpio, uint16_t cs_pin);这里的GPIO_Type,是MindSDK中的类型,不同于STM32。
STM32的drv_spi.h文件中还有其他类型的定义,仔细查看发现仅在drv_spi.c中使用,别的文件并没有用到。因此,另外的那些类型定义,放到.c文件中更合适。
从这个接口这里可以看出来,RT-Thread的多个SPI设备是可以公用一个SPI总线的。具体使用 放肆可以参考官方文档:SPI设备 (rt-thread.org)
drv_spi.c
通过总结STM32的drv_spi.c文件,可以知道在drv_spi.c文件中,我们需要实现如下内容:
- rt_hw_spi_device_attach 接口
- rt_spi_ops 接口,包括configure和xfer两个接口
- SPI总线设备注册,并将rt_spi_ops 实例绑定到SPI总线设备
好了,接下来就可以动手实现这些内容了。
SPI总线配置
SPI总线配置类型定义:
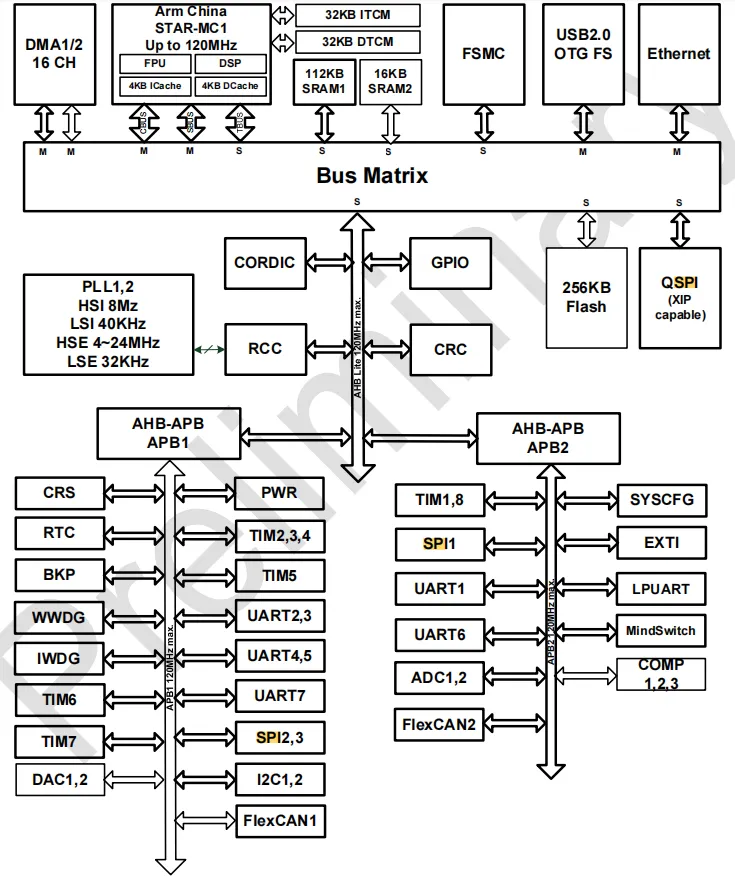
struct mm32_spi_config{ SPI_Type *spi_handle; const char *bus_name; rt_uint32_t clock_freq; // 主模式才会用到,将传给 SPI_Master_Init_Type.ClockFreqHz};查阅MM32F5270 SDK的hal_spi.h文件,可以知道MM32F5270一共有三个SPI。其中,SPI1在片内的APB2总线上,SPI2和SPI3在片内的APB1总线上。当然,查看数据手册的系统框图也可以知道:
因此,SPI总线基础配置数组,定义如下:
static struct mm32_spi_config spi_config[] = { {SPI1, "spi1", CLOCK_APB2_FREQ}, {SPI2, "spi2", CLOCK_APB1_FREQ}, {SPI3, "spi3", CLOCK_APB1_FREQ},};类似的,可以定义用于索引数组的枚举:
enum{ SPI1_INDEX, SPI2_INDEX, SPI3_INDEX, SPI_MAX};这里为了代码清晰,暂时没有添加每个SPI的配置项。后期调通之后,可以通过Kconfig为每个SPI添加配置项;只在配置打开后,才编译相关代码。
SPI总线对象
SPI总线对象类型定义,如下:
struct mm32_spi{ SPI_Type *spi_handle; struct mm32_spi_config *soc_cfg; // SPI总线配置,用于给底层接口传参数 const struct rt_spi_configuration *drv_cfg; // RT-Thread SPI驱动框架配置,由上层传下来 struct rt_spi_bus spi_bus;};static struct mm32_spi spi_bus_obj[SPI_MAX] = {0}; // rt_hw_spi_bus_init 中会用到SPI总线设备注册
有了前面的类型定义,就可以实现SPI总线设备注册了。模仿STM32,编写rt_hw_spi_bus_init函数,并让其在启动时自动执行:
static int rt_hw_spi_bus_init(void){ rt_err_t result = RT_EOK; for (rt_size_t i = 0; i < SPI_MAX; i++) { spi_bus_obj[i].soc_cfg = &spi_config[i]; spi_bus_obj[i].spi_bus.parent.user_data = &spi_config[i]; spi_bus_obj[i].spi_handle = spi_config[i].spi_handle; result = rt_spi_bus_register(&spi_bus_obj[i].spi_bus, spi_config[i].bus_name, &mm32_spi_ops); RT_ASSERT(result == RT_EOK); LOG_D("SPI bus device %s register done!", spi_config[i].bus_name); } return result;}INIT_BOARD_EXPORT(rt_hw_spi_bus_init);rt_hw_spi_bus_init函数中,调用了rt_spi_bus_register函数,向系统注册了spi1、spi2、spi3设备;同时,将SPI总线对象数组(spi_bus_obj)中的部分指针成员指向spi_config数组中的成员,方便后续其他接口中进行操作。
这里的mm32_spi_ops,定义如下:
static const struct rt_spi_ops mm32_spi_ops = { .configure = mm32_spi_configure, .xfer = mm32_spi_xfer,};rt_hw_spi_device_attach接口实现
类似的,可以实现rt_hw_spi_device_attach函数:
static const struct{ GPIO_Type *gpio; rt_uint32_t rcc;} gpio_rcc_table[] = { // 用于初始化对应的GPIO AHB时钟 {GPIOA, RCC_AHB1_PERIPH_GPIOA}, {GPIOB, RCC_AHB1_PERIPH_GPIOB}, {GPIOC, RCC_AHB1_PERIPH_GPIOC}, {GPIOD, RCC_AHB1_PERIPH_GPIOD}, {GPIOE, RCC_AHB1_PERIPH_GPIOE}, {GPIOF, RCC_AHB1_PERIPH_GPIOF}, {GPIOG, RCC_AHB1_PERIPH_GPIOG}, {GPIOH, RCC_AHB1_PERIPH_GPIOH}, {GPIOI, RCC_AHB1_PERIPH_GPIOI},};rt_err_t rt_hw_spi_device_attach(const char *bus_name, const char *device_name, GPIO_Type *cs_gpio, uint16_t cs_pin){ RT_ASSERT(bus_name != RT_NULL); RT_ASSERT(device_name != RT_NULL); RT_ASSERT(cs_gpio != RT_NULL); rt_err_t result = RT_EOK; struct rt_spi_device *spi_device = RT_NULL; struct mm32_spi_cs *spi_cs_pin = RT_NULL; // enable and reset cs GPIO clock for (rt_size_t i = 0; i < sizeof(gpio_rcc_table) / sizeof(gpio_rcc_table[0]); i++) { if (gpio_rcc_table[i].gpio == cs_gpio) { RCC_EnableAHB1Periphs(gpio_rcc_table[i].rcc, true); RCC_ResetAHB1Periphs(gpio_rcc_table[i].rcc); break; } } // prepare and init GPIO GPIO_Init_Type gpio_init; gpio_init.Pins = cs_pin; gpio_init.Speed = GPIO_Speed_50MHz; gpio_init.PinMode = GPIO_PinMode_Out_PushPull; GPIO_Init(cs_gpio, &gpio_init); // create mm32_spi_cs object spi_cs_pin = (struct mm32_spi_cs *)rt_calloc(sizeof(struct mm32_spi_cs), 1); spi_cs_pin->gpio = cs_gpio; spi_cs_pin->pin = cs_pin; // create spi_device object spi_device = (struct rt_spi_device *)rt_calloc(sizeof(struct rt_spi_device), 1); RT_ASSERT(spi_device != RT_NULL); // attach spi_device to spi bus result = rt_spi_bus_attach_device(spi_device, device_name, bus_name, (void *)spi_cs_pin); if (result != RT_EOK) { LOG_E("%s attach to bus %s faild, %d\n", device_name, bus_name, result); return result; } LOG_D("%s attach to bus %s done", device_name, bus_name); return RT_EOK;}rt_hw_spi_device_attach函数中,首先初始化了cs_gpio的时钟和功能,然后创建mm32_spi_cs和rt_spi_device对象,最后调用rt_spi_bus_attach_device,将SPI设备关联到SPI总线上,并将mm32_spi_cs对象指针作为额外参数(填充在rt_spi_device.parent.user_data上)。
rt_spi_ops接口定义
rt_hw_spi_bus_init函数中引用的mm32_spi_ops变量,其中记录了RT-Thread SPI驱动框架预留给芯片平台的两个SPI操作接口。struct rt_spi_ops类型定义如下:
struct rt_spi_ops{ rt_err_t (*configure)(struct rt_spi_device *device, struct rt_spi_configuration *configuration); rt_uint32_t (*xfer)(struct rt_spi_device *device, struct rt_spi_message *message);};我们实现的mm32_spi_configure和mm32_spi_xfer函数,它们的参数和返回值需要和rt_spi_ops里面的一致。
rt_spi_ops.configure接口实现
rt_spi_ops.configure接口的职责是——将上层rt_spi_configure接口的配置参数传递给底层,完成SPI相关参数设置。MM32F5270的具体实现如下:
static rt_err_t mm32_spi_configure(struct rt_spi_device *device,struct rt_spi_configuration *configuration){ RT_ASSERT(device != RT_NULL); RT_ASSERT(configuration != RT_NULL); struct mm32_spi *spi_bus = rt_container_of(device->bus, struct mm32_spi, spi_bus); spi_bus->drv_cfg = configuration; struct mm32_spi_cs *cs_pin = (struct mm32_spi_cs *)device->parent.user_data; return mm32_spi_init(spi_bus, cs_pin);}void mm32_gpio_pin_init(GPIO_Type *gpiox, uint16_t pin, uint8_t afn, GPIO_PinMode_Type mode, GPIO_Speed_Type speed){ GPIO_Init_Type gpio_init; gpio_init.Pins = pin; gpio_init.PinMode = mode; gpio_init.Speed = speed; GPIO_Init(gpiox, &gpio_init); GPIO_PinAFConf(gpiox, pin, afn);}// 这里配置SPI实际引脚和外设时钟,可能需要根据实际情况修改static void mm32_spi_bus_pin_init(SPI_Type *spi_handle, rt_bool_t master_mode){ if (spi_handle == SPI3) { // SPI3, enable and reset clock RCC_EnableAPB1Periphs(RCC_APB1_PERIPH_SPI3, true); RCC_ResetAPB1Periphs(RCC_APB1_PERIPH_SPI3); // GPIOC. for PC10, PC11, PC12 RCC_EnableAHB1Periphs(RCC_AHB1_PERIPH_GPIOC, true); RCC_ResetAHB1Periphs(RCC_AHB1_PERIPH_GPIOC); // PC12 GPIO_AF_6: SPI3_MOSI mm32_gpio_pin_init(GPIOC, GPIO_PIN_12, GPIO_AF_6, GPIO_PinMode_AF_PushPull, GPIO_Speed_50MHz); // PC11 GPIO_AF_6: SPI3_MISO mm32_gpio_pin_init(GPIOC, GPIO_PIN_11, GPIO_AF_6, GPIO_PinMode_In_Floating, GPIO_Speed_50MHz); if (master_mode) { // PC10 GPIO_AF_6: SPI3_SCK mm32_gpio_pin_init(GPIOC, GPIO_PIN_10, GPIO_AF_6, GPIO_PinMode_AF_PushPull, GPIO_Speed_50MHz); } } else { LOG_E("%s: invalid spi_handle, no SPI1 and SPI2 configurations!", __func__); }}// typedef enum// {// SPI_PolPha_Alt0 = 0u, /*!< CPOL = 0, CPHA = 1, Clock line is low when idle, Data valid when at falling edge */// SPI_PolPha_Alt1 = 1u, /*!< CPOL = 0, CPHA = 0, Clock line is low when idle, Data valid when at rising edge */// SPI_PolPha_Alt2 = 2u, /*!< CPOL = 1, CPHA = 1, Clock line is high when idle, Data valid when at rising edge */// SPI_PolPha_Alt3 = 3u, /*!< CPOL = 1, CPHA = 0, Clock line is high when idle, Data valid when at falling edge */// } SPI_PolPha_Type;static SPI_PolPha_Type mm32_polpha_from_mode(rt_uint8_t mode){ rt_bool_t cpol = (mode & RT_SPI_CPOL) ? RT_TRUE : RT_FALSE; rt_bool_t cpha = (mode & RT_SPI_CPHA) ? RT_TRUE : RT_FALSE; if (cpol && cpha) { return SPI_PolPha_Alt2; // CPOL = 1, CPHA = 1 } if (cpol) { return SPI_PolPha_Alt3; // CPOL = 1, CPHA = 0 } if (cpha) { return SPI_PolPha_Alt0; // CPOL = 0, CPHA = 1 } return SPI_PolPha_Alt1; // CPOL = 0, CPHA = 0}static rt_err_t mm32_spi_init(struct mm32_spi *spi_bus, struct mm32_spi_cs *cs_pin){ struct mm32_spi_config *soc_cfg = spi_bus->soc_cfg; const struct rt_spi_configuration *drv_cfg = spi_bus->drv_cfg; RT_ASSERT(spi_bus != RT_NULL); RT_ASSERT((drv_cfg->data_width % 8) == 0); // check is master mode or not rt_bool_t master_mode = (drv_cfg->mode & RT_SPI_SLAVE) ? RT_FALSE : RT_TRUE; LOG_D("master_mode=%d, peed=%d, data_width=%d", master_mode, drv_cfg->max_hz, drv_cfg->data_width); // set SPI bus pins as SPI function mm32_spi_bus_pin_init(soc_cfg->spi_handle, master_mode); // prepare SPI config, setup SPI master/slave if (master_mode) { SPI_Master_Init_Type master_cfg; master_cfg.ClockFreqHz = soc_cfg->clock_freq; master_cfg.BaudRate = drv_cfg->max_hz; master_cfg.PolPha = mm32_polpha_from_mode(drv_cfg->mode); master_cfg.DataWidth = drv_cfg->data_width; master_cfg.XferMode = SPI_XferMode_TxRx; master_cfg.AutoCS = cs_pin ? false : true; master_cfg.LSB = (drv_cfg->mode & RT_SPI_MSB) ? false : true; SPI_InitMaster(soc_cfg->spi_handle, &master_cfg); } else { SPI_Slave_Init_Type slave_cfg; slave_cfg.PolPha = mm32_polpha_from_mode(drv_cfg->mode); slave_cfg.DataWidth = drv_cfg->data_width; slave_cfg.XferMode = SPI_XferMode_TxRx; slave_cfg.AutoCS = false; slave_cfg.LSB = (drv_cfg->mode & RT_SPI_MSB) ? false : true; SPI_InitSlave(soc_cfg->spi_handle, &slave_cfg); } // eanble SPI master/slave SPI_Enable(soc_cfg->spi_handle, true); LOG_I("%s done!", __func__); return RT_EOK;}这段代码中,mm32_spi_bus_pin_init函数类似于STM32的HAL_SPI_MspInit,用于初始化SPI的实际引脚及其时钟。看了一下开发板原理图,整个板子很多引脚几乎全都被占用了。最终选了PC10、PC11、PC12引脚作为SPI3功能进行后续测试,所以这里暂时只有PC10、PC11、PC12引脚初始化为SPI3的代码。
rt_spi_ops.xfer接口实现
rt_spi_ops.xfer接口的职责是——和上层rt_spi_transfer/rt_spi_send/rt_spi_recv之类的发送、接收接口对接,实现SPI发送或接收功能。MM32F5270的具体实现如下:
static rt_uint32_t mm32_spi_xfer(struct rt_spi_device *device, struct rt_spi_message *message){ rt_size_t xfer_len; rt_uint8_t *recv_buf; rt_uint8_t *send_buf; SPI_Type *spi = RT_NULL; rt_err_t stat = RT_EOK; RT_ASSERT(device != RT_NULL); RT_ASSERT(message != RT_NULL); RT_ASSERT(device->parent.user_data != RT_NULL); struct mm32_spi *spi_bus = rt_container_of(device->bus, struct mm32_spi, spi_bus); struct mm32_spi_cs *cs = (struct mm32_spi_cs *)device->parent.user_data; if (message->cs_take && !(device->config.mode & RT_SPI_NO_CS)) { LOG_D("%s: cs_take, mode=%d", __func__, device->config.mode); if (device->config.mode & RT_SPI_CS_HIGH) { GPIO_SetBits(cs->gpio, cs->pin); } else { GPIO_ClearBits(cs->gpio, cs->pin); } } spi = spi_bus->spi_handle; xfer_len = message->length; recv_buf = (rt_uint8_t *)message->recv_buf; send_buf = (rt_uint8_t *)message->send_buf; LOG_D("%s: xfer_len=%d, %s", __func__, xfer_len, recv_buf ? "recv" : "send"); if (message->send_buf && message->recv_buf) { // 同时发送、接收,上层需要保证 send_buf、recv_buf 可访问长度 不小于 xfer_len stat = _spi_xfer(spi, send_buf, recv_buf, xfer_len, SPI_TIME_OUT); } else if (message->send_buf) { // 只发送 stat = _spi_xfer(spi, send_buf, RT_NULL, xfer_len, SPI_TIME_OUT); } else if (message->recv_buf) { rt_memset(recv_buf, 0xff, xfer_len); stat = _spi_xfer(spi, recv_buf, // 生成足够的时钟信号 recv_buf, xfer_len, SPI_TIME_OUT); } else { LOG_E("%s: both send_buf and recv_buf is null!", __FUNCTION__); stat = RT_EIO; } if (message->cs_release && !(device->config.mode & RT_SPI_NO_CS)) { LOG_D("%s: cs_release, mode=%d", __func__, device->config.mode); if (device->config.mode & RT_SPI_CS_HIGH) { GPIO_ClearBits(cs->gpio, cs->pin); } else { GPIO_SetBits(cs->gpio, cs->pin); } } if (stat != RT_EOK) { xfer_len = 0; } return xfer_len;}static rt_err_t _spi_xfer(SPI_Type *spi, const rt_uint8_t *tx_buff, rt_uint8_t *rx_buff, rt_uint32_t length, rt_uint32_t timeout){ rt_uint32_t start = rt_tick_get(); rt_uint8_t dat = 0; if ((tx_buff == RT_NULL) || (length == 0)) { return RT_EIO; } while (length--) { // wait for tx not full while (SPI_GetStatus(spi) & SPI_STATUS_TX_FULL) { if ((rt_tick_get() - start) > timeout) { return RT_ETIMEOUT; } } // send a byte SPI_PutData(spi, *tx_buff++); // wait for rx done while (!(SPI_GetStatus(spi) & SPI_STATUS_RX_DONE)) { if ((rt_tick_get() - start) > timeout) { return RT_ETIMEOUT; } } // recv a byte dat = SPI_GetData(spi); if (rx_buff) { *rx_buff++ = dat; } } return RT_EOK;}_spi_xfer代码参考了SDK里面的部分代码,实现了SPI上的数据首发。
SPI功能测试
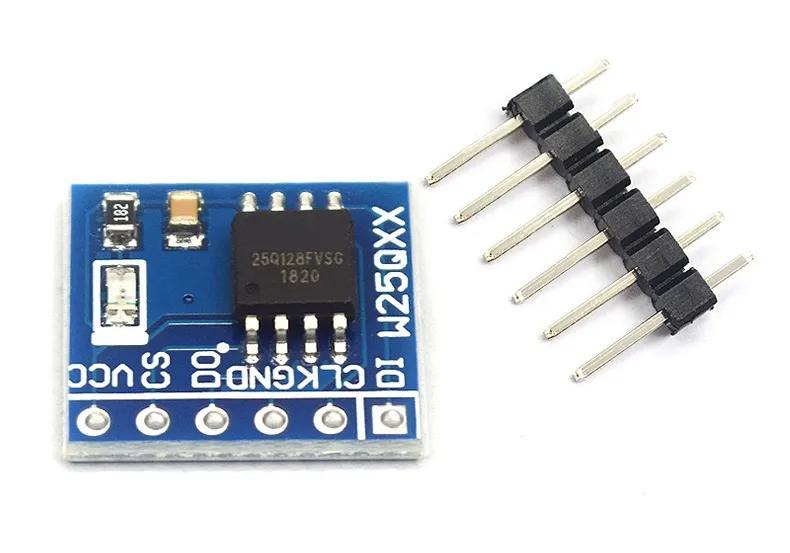
测试外设——W25Q128
为了能够同时测试SPI的发送和接收功能,这里选用了SPI Flash模组,芯片为华邦的W25Q128(16MB)。模组外观(图片来自某宝):
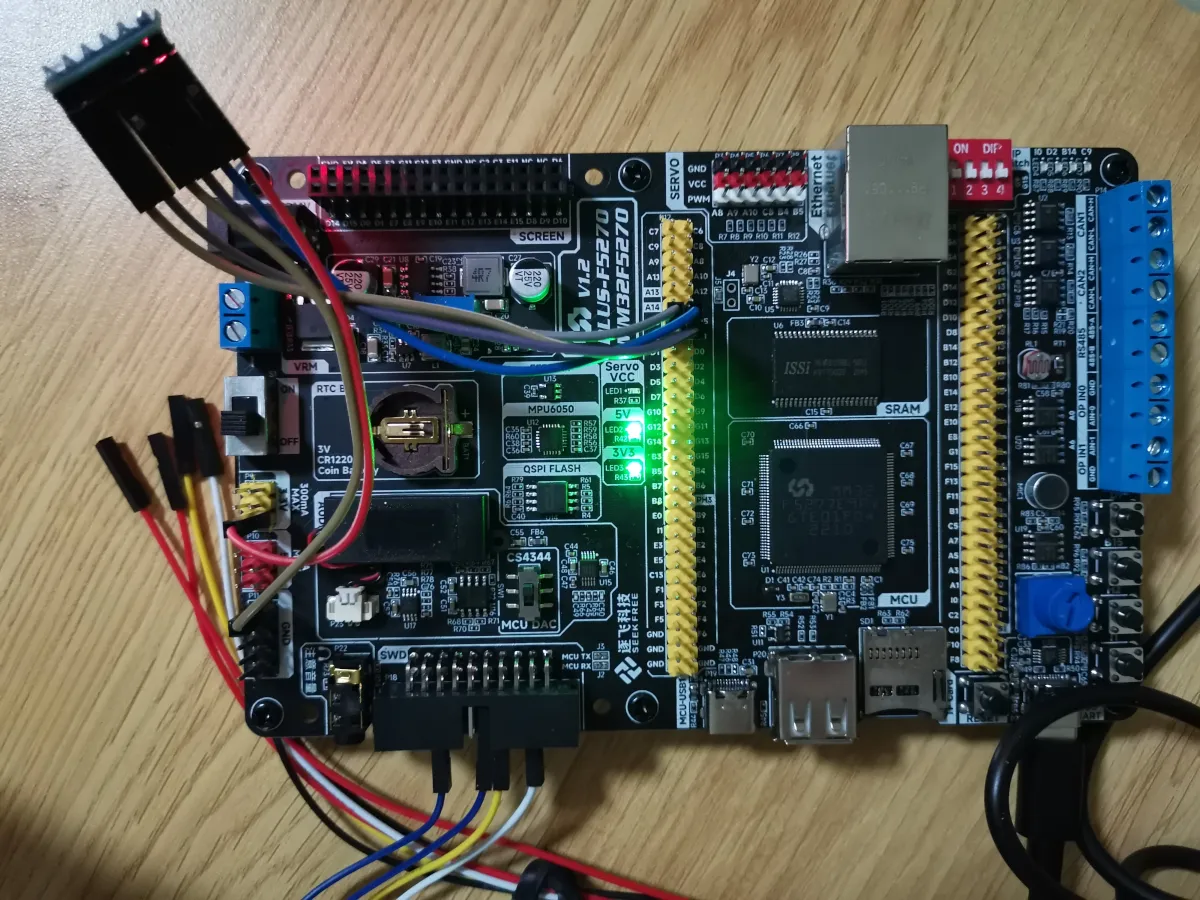
板子和模块的连接关系如下图:
SFUD和FAL组件配置
由于RT-Thread系统本身带有SFUD(Serial Flash Universal Driver)组件、FAL(Flash Abstract Layer)组件,以及FlashDB软件包。因此,通过简单的配置就可以驱动SPI Flash模组,并使用FAL组件附带的命令对Flash芯片进行读取、写入、擦除等操作,以及使用FlashDB实现键值存储(KVDB)。
通过使用env工具的menuconfig命令,进行配置的具体操作这里不再描述。
使用SFUD、FAL组件,所需的具体配置项如下(menuconfig界面中可以使用键“/”进行搜索):
CONFIG_RT_USING_FAL=yCONFIG_FAL_DEBUG_CONFIG=yCONFIG_FAL_DEBUG=1CONFIG_FAL_PART_HAS_TABLE_CFG=yCONFIG_FAL_USING_SFUD_PORT=yCONFIG_FAL_USING_NOR_FLASH_DEV_NAME="norflash0"CONFIG_RT_USING_SPI=yCONFIG_RT_USING_SFUD=yCONFIG_RT_SFUD_USING_SFDP=yCONFIG_RT_SFUD_USING_FLASH_INFO_TABLE=yCONFIG_RT_SFUD_SPI_MAX_HZ=1000000配置完成后,使用如下命令重新生成mdk项目:
scons --target=mdk5这个命令本身也会编译项目,但是需要保证rtconfig.py中的配置正确。
MDK项目生成完成后,使用Keil编译、烧录。
板子再次启动时,看到SFUD、FAL初始化成功的日志,则表示SPI功能正常了。
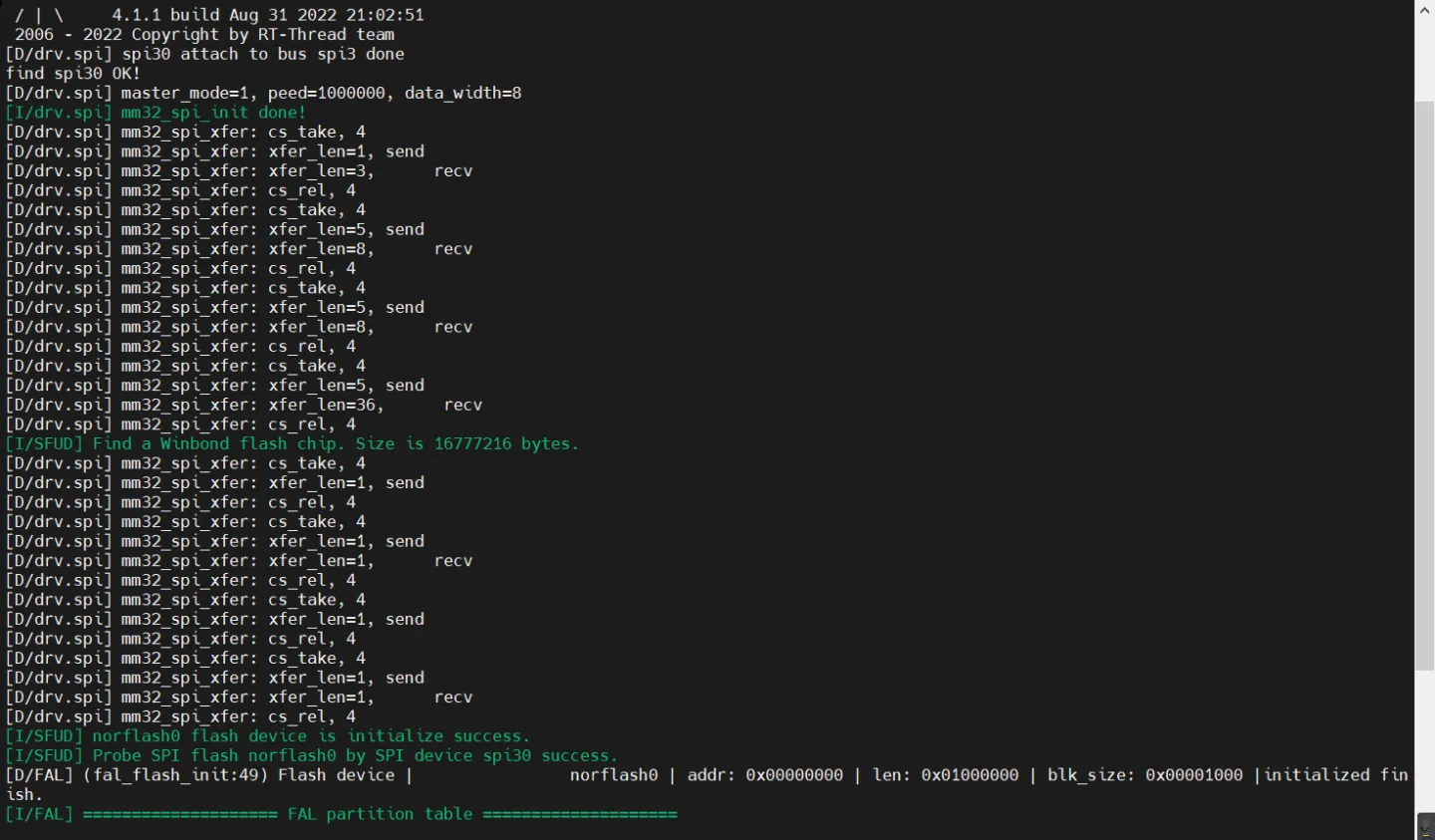
正常的话,启动日志如下图:
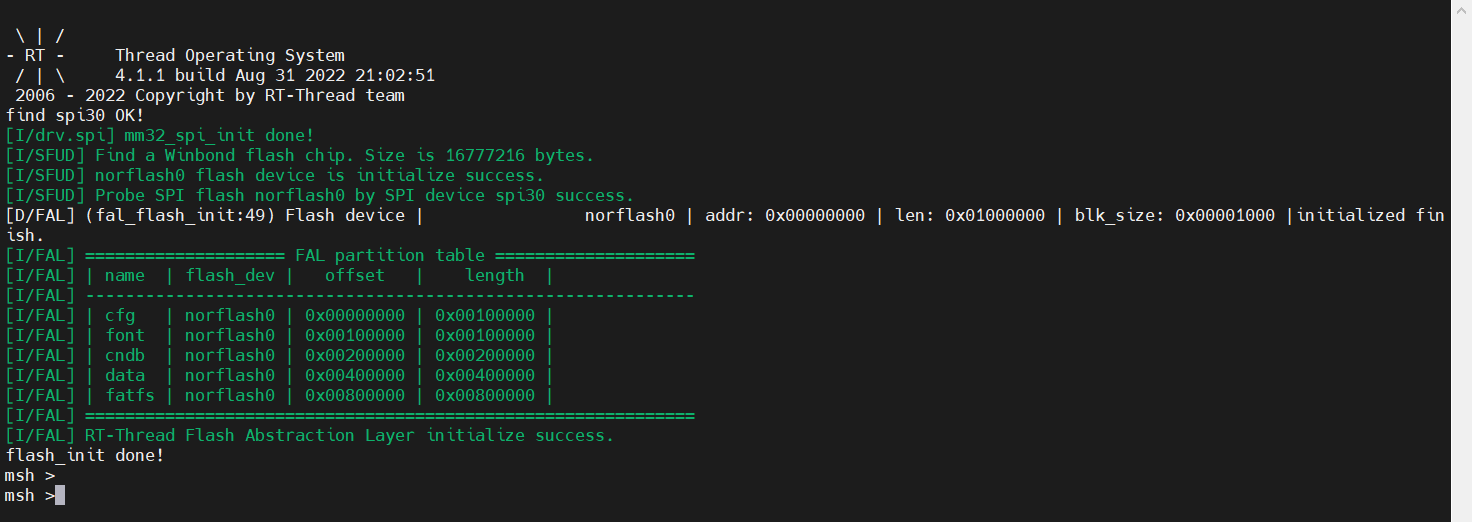
可以看到,成功识别到。
也可以取消drv_spi.c中的#define DEBUG注释,打开调试日志,可以看到SPI发送和接收的日志信息:
FlashDB软件包测试
首先在menuconfig界面中启用FlashDB软件包:
RT-Thread online packages → system packages → FlashDB
然后,进入FlashDB组件配置项,关闭暂时用不到的TSDB;
重新生成mdk项目:
scons --target=mdk5编译、烧录、运行。
测试运行如下:
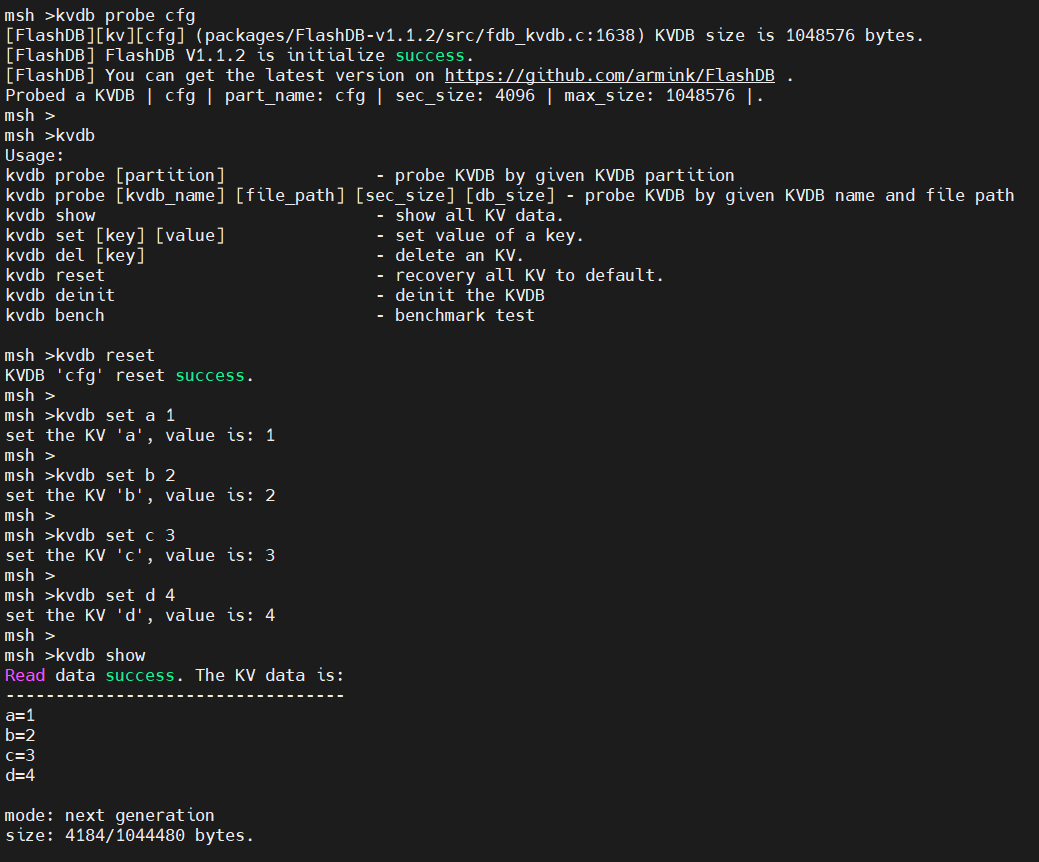
测试正常!
代码仓
文中贴出来的只是代码片段,完整代码请参考码云代码仓:https://gitee.com/MM32F5270/mm32f5270_rtt
问题解决
关于配置和生成项目
这里我配置使用的是RT-Thread的env命令行工具(env.exe),跳转到项目目录后,执行menuconfig命令,进行配置的。
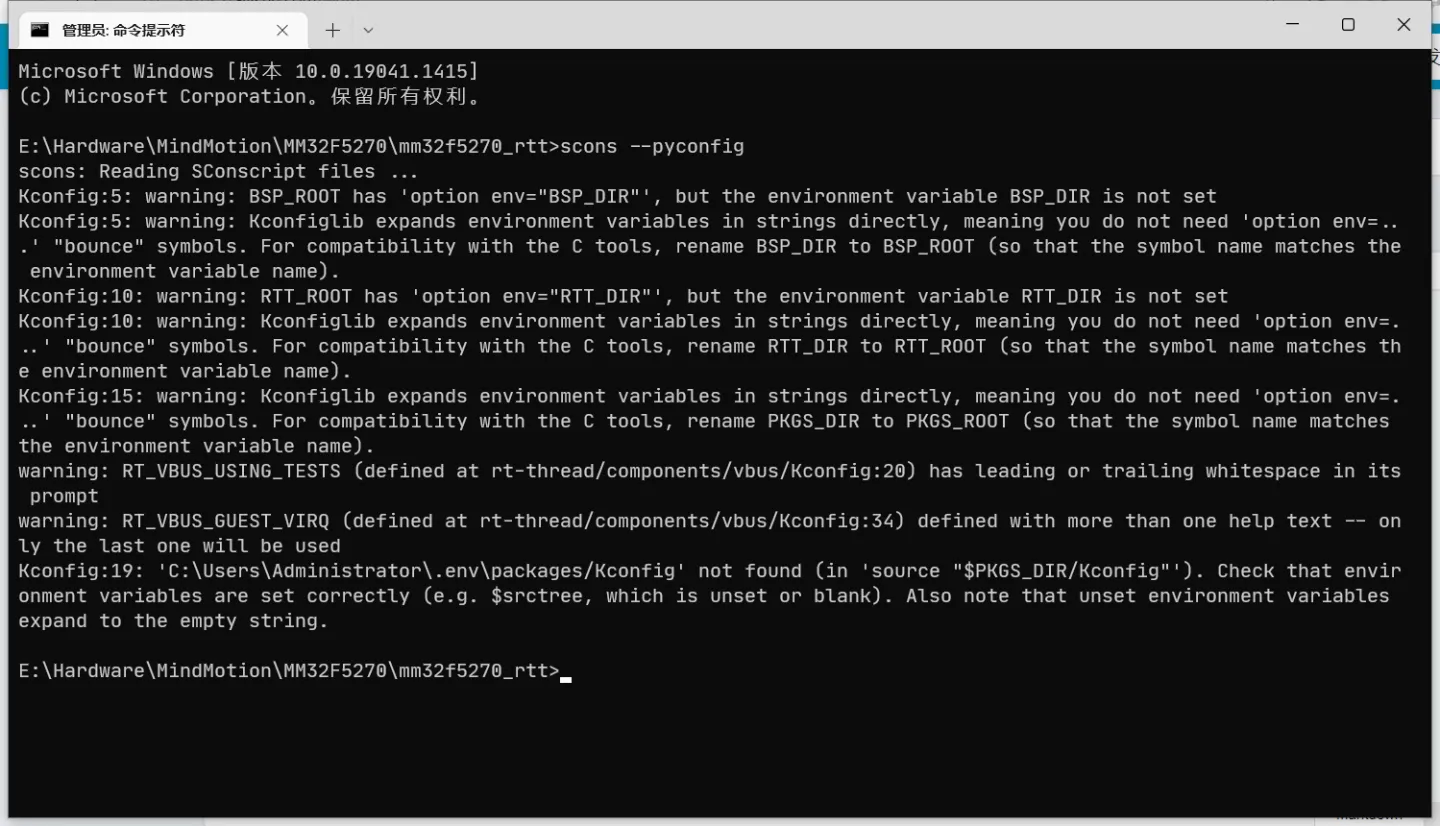
除此之外,也可以在git bash中使用scons --pyconfig命令,对项目进行配置;但执行该命令之前,需要先设置ENV_ROOT环境变量,并将其设置为你的env工具所在目录,例如:
export ENV_ROOT=/d/RT-ThreadStudio/platform/env_released/env# cmd 中使用如下命令设置:# set ENV_ROOT=D:\RT-ThreadStudio\platform\env_released\env没有设置ENV_ROOT环境变量的话,scons --pyconfig命令会有如下报错:
参考链接
- 【极术社区】【MM32F5270开发板试用】RT-Thread的移植:https://aijishu.com/a/1060000000347637
- 【RT-Thread文档中心】SPI 设备:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/spi/spi

