Far planner 之 Matterport3d环境的导入
我们知道Far planner里有自带的Autonomous Exploration Development Environment实验室的环境,但是有的时候我们还是想在更真实的世界里进行仿真,那么就需要用到Matterport3d
首先我们要把原本的autonomous_exploration_development_environment的分支切换到matterport下,其中的distribution是我们ros的版本 我用的是noetic:
cd autonomous_exploration_development_environment
git checkout distribution-matterport && catkin_makegit checkout noetic-matterport && catkin_make
提示:我们需要做点云转换,所以需要MeshlabMeshLab https://www.meshlab.net
https://www.meshlab.net
Matterport3D: Learning from RGB-D Data in Indoor Environments (niessner.github.io)![]() https://niessner.github.io/Matterport/ 上面是连接,我们要使用它的资源,必须要给该实验室发送一份agreement信件,按照上面所要求的信息填写。PI我写的是自己导师的联系方式和email
https://niessner.github.io/Matterport/ 上面是连接,我们要使用它的资源,必须要给该实验室发送一份agreement信件,按照上面所要求的信息填写。PI我写的是自己导师的联系方式和email
发送过去后可能7天之内回给你回复信息,会发送一个带有下载地图的一个python文件,它主要是用python2编写的,python3运行会报错,所以我们最好用conda建立一个新环境
conda create -n python2 python=2.7
然后我们就可以按要求愉快的下载啦
主要是下载几个文件,以ID:17DRP5sb8fy为例,我们需要下载它的house_segmentations.zip和matterport_mesh.zip
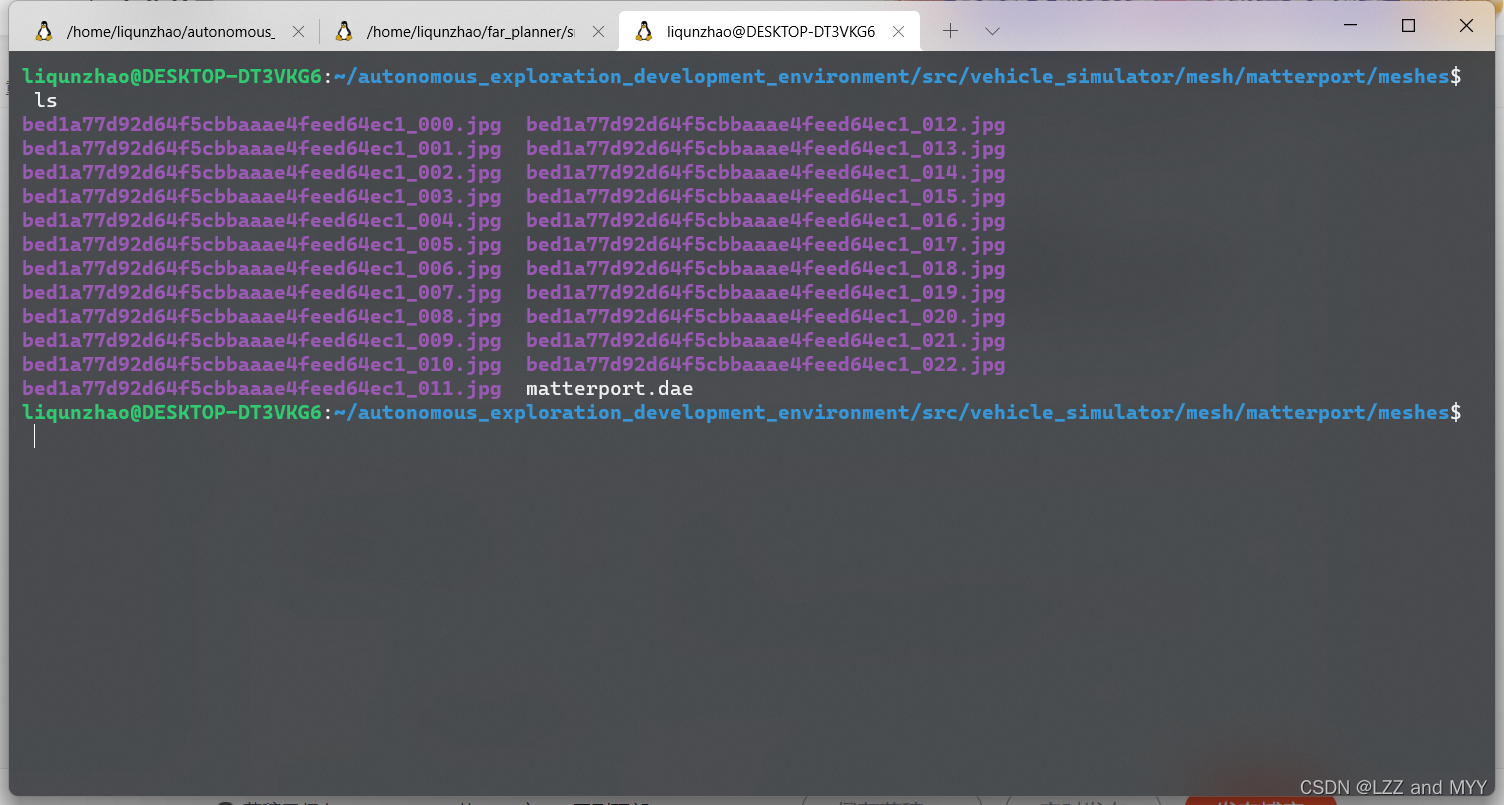
对于matterport_mesh里的.obj文件,我们需要用meshlab把它打开,并选择file->export_mesh_as 保存格式选择dae,重命名为matterport.dae,将贴图质量拉满100,点击导出以后会有一堆文件,将这些文件一起copy到'src/vehicle_simulator/mesh/matterport/meshes'
然后解压house_segmentations.zip,把里面的.ply文件重命名为pointcloud.ply,放到'src/vehicle_simulator/mesh/matterport/preview'下。把里面的.house文件重命名为matterport.house,并放在 'src/vehicle_simulator/mesh/matterport/
segmentations'
最后我们cd进autonomous_exploration_development_environment
source /devel/setup.bash
roslaunch vehicle_simulator system_matterport.launch
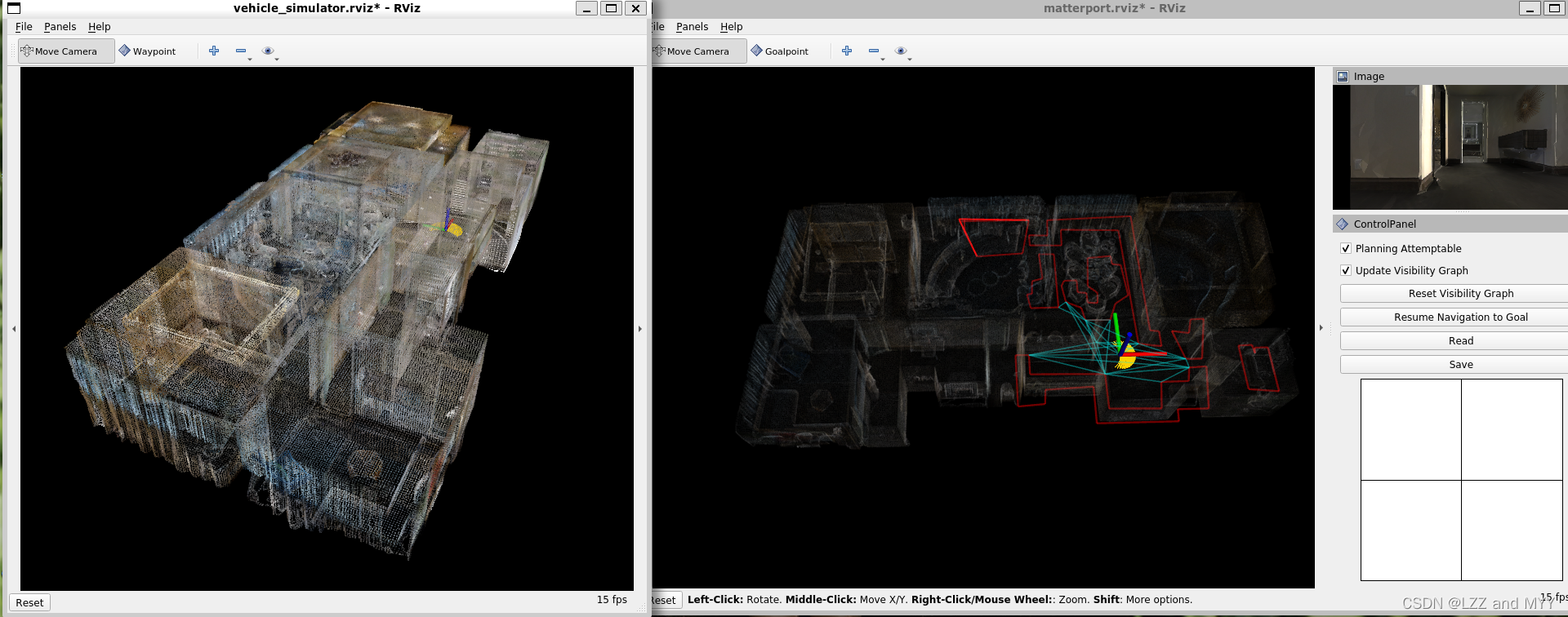
我们就可以看到如下图所示的场景啦~
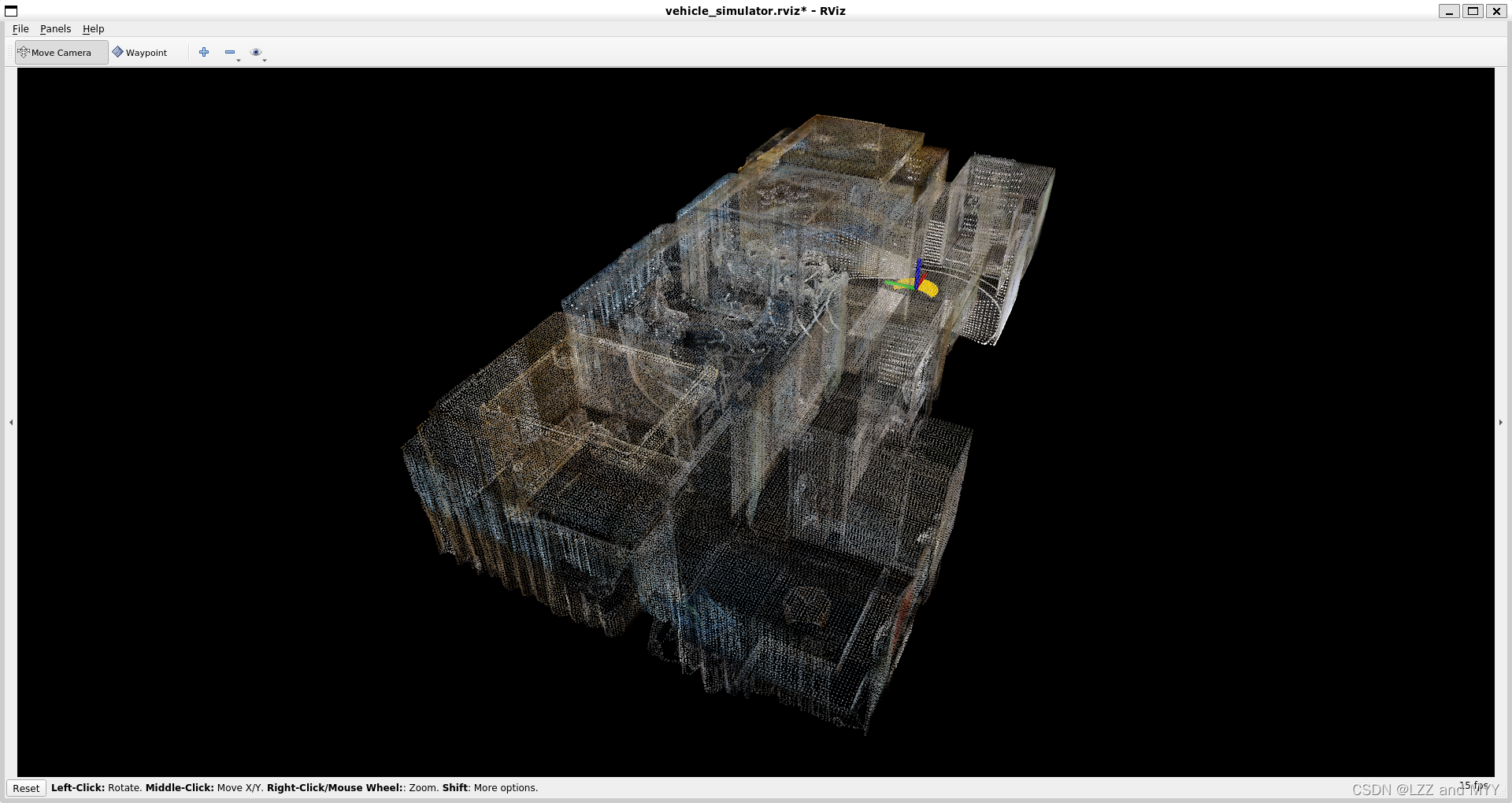
最后,和far_planner联合~