【算法解析5/5 下】强化学习(RL)深度解析:常用主流算法(附Python代码)|动态规划、蒙特卡洛方法、时序差分学习、Q-Learning、策略梯度与Actor-Critic方法|优缺点与工程建议_rl 有哪些常见算法
注:本系列将有五部分,分别对应五大机器学习任务类型,包括:
1. 分类(Classification)、2. 回归(Regression)、3. 聚类(Clustering)、4. 降维(Dimensionality Reduction)以及 5. 强化学习(Reinforcement Learning)
此文含大量干货,建议收藏方便以后再读!
注:此为两部分中的下部,上部请按下面链接前往!(强烈建议先看上部分)
【算法解析5/5 上】强化学习(RL)深度解析:常用算法、数学目标与核心公式、与其他任务的差别 | 状态、动作、奖励、策略、环境转移概率、折扣因子 | MDP、累积奖励、策略与价值函数、贝尔曼方程-CSDN博客
大家好,我是爱酱。强化学习是机器学习五大任务中最具挑战性和潜力的分支之一,广泛应用于智能控制、博弈、机器人、自动驾驶、推荐系统等地方。作为强化学习专题的第二部分,本节将围绕实际案例,详细讲解强化学习的典型算法、核心思想、数学表达与操作流程,帮助你系统掌握强化学习的实践方法。(将继续延续上部分的完结部分)
七、强化学习主流算法与详细流程
1. 动态规划(Dynamic Programming, DP)
适用场景:环境模型已知(即状态转移概率$P$和奖励已知)
代表方法:值迭代(Value Iteration)、策略迭代(Policy Iteration)
值迭代核心流程
-
初始化所有状态的价值
为0
-
重复更新:对每个状态
,按贝尔曼方程迭代
-
直到
优缺点:理论完备,但需环境模型,难以扩展到大规模或未知环境。
2. 蒙特卡洛方法(Monte Carlo Methods)
适用场景:环境模型未知,但能采样完整回合
核心思想:通过多次采样完整轨迹,直接用经验平均累计奖励估计价值函数
流程
-
反复采样完整回合,记录每步状态、动作、奖励
-
每个状态的价值由其后续实际累计奖励的平均值估计
-
可用于策略评估和策略改进
优缺点:无需环境模型,样本利用率低,需完整回合。
3. 时序差分学习(Temporal Difference, TD)
适用场景:环境模型未知,可在线学习
核心思想:结合动态规划和蒙特卡洛,边采样边更新价值函数
TD(0)更新公式
-
每一步采样后立即更新当前状态的价值估计
-
TD(
)可结合多步信息,提升效率
优缺点:无需完整回合,学习速度快,理论基础扎实。
4. Q-Learning(离线/无模型强化学习)
适用场景:环境模型未知,目标学得最优策略
核心思想:直接学习最优动作价值函数,不依赖环境模型
Q-Learning更新公式
-
训练目标是学会最优策略
-
采用
-贪婪策略平衡探索与利用
优缺点:简单高效,理论保证收敛,适合离线学习和大规模问题。
5. 策略梯度与Actor-Critic方法
适用场景:动作空间大或连续、策略需直接优化
核心思想:直接优化参数化策略,通过采样估计梯度并更新参数
策略梯度公式
-
Actor-Critic结合了价值函数和策略优化,提升训练效率和稳定性
-
适合复杂、高维、连续动作空间
优缺点:适用范围广,收敛速度快,但易陷入局部最优,对超参数敏感。
八、(简单版)强化学习案例流程与代码演示
案例:迷宫寻路(GridWorld)Q-Learning
1. 环境描述
-
迷宫,智能体起点
,目标点
,每步奖励
,到达目标奖励
-
动作:上、下、左、右
2. Q-Learning详细流程
-
初始化
为0
-
对每一回合:
-
智能体从起点出发
-
按
-
执行动作,获得新状态和奖励
-
按Q-Learning公式更新
-
到达目标或步数耗尽则回合结束
-
-
重复多回合,Q值逐渐收敛,智能体学会最短路径
3. Python代码示例(简易版)
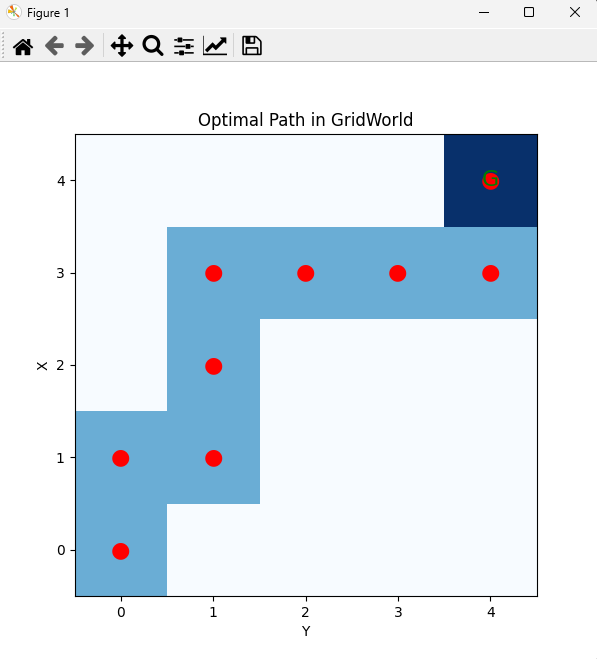
import numpy as npimport matplotlib.pyplot as plt# 1. 环境参数n_states = 5 # 5x5网格actions = [\'up\', \'down\', \'left\', \'right\']action_dict = {0: (-1, 0), 1: (1, 0), 2: (0, -1), 3: (0, 1)}goal_state = (4, 4)# 2. Q表初始化Q = np.zeros((n_states, n_states, len(actions)))# 3. Q-Learning参数alpha = 0.1 # 学习率gamma = 0.9 # 折扣因子epsilon = 0.2 # 探索率episodes = 500 # 训练回合数max_steps = 100 # 每回合最大步数# 4. 环境step函数def step(state, action): x, y = state dx, dy = action_dict[action] nx, ny = x + dx, y + dy # 边界处理 nx = min(max(nx, 0), n_states - 1) ny = min(max(ny, 0), n_states - 1) next_state = (nx, ny) # 奖励设计 if next_state == goal_state: reward = 10 done = True else: reward = -1 done = False return next_state, reward, done# 5. Q-Learning主循环for episode in range(episodes): state = (0, 0) for step_count in range(max_steps): # epsilon-贪婪策略 if np.random.rand() < epsilon: action = np.random.choice(len(actions)) else: action = np.argmax(Q[state[0], state[1]]) next_state, reward, done = step(state, action) # Q值更新 Q[state[0], state[1], action] += alpha * ( reward + gamma * np.max(Q[next_state[0], next_state[1]]) - Q[state[0], state[1], action] ) state = next_state if done: breakprint(\"Q-Learning训练完成!\")# 6. 策略展示(从起点到终点的最优路径)def get_optimal_path(Q, start, goal): path = [start] state = start for _ in range(100): action = np.argmax(Q[state[0], state[1]]) next_state, _, _ = step(state, action) path.append(next_state) if next_state == goal: break state = next_state return pathoptimal_path = get_optimal_path(Q, (0,0), goal_state)print(\"最优路径:\", optimal_path)# 7. 可视化最优路径grid = np.zeros((n_states, n_states))for (x, y) in optimal_path: grid[x, y] = 1grid[goal_state] = 2plt.figure(figsize=(6,6))plt.imshow(grid, cmap=\'Blues\', origin=\'upper\')plt.title(\'Optimal Path in GridWorld\')plt.xticks(range(n_states))plt.yticks(range(n_states))plt.xlabel(\'Y\')plt.ylabel(\'X\')for (x, y) in optimal_path: plt.text(y, x, \'●\', ha=\'center\', va=\'center\', color=\'red\', fontsize=16)plt.text(goal_state[1], goal_state[0], \'G\', ha=\'center\', va=\'center\', color=\'green\', fontsize=16)plt.gca().invert_yaxis()plt.show()代码说明
-
step函数:定义了智能体在网格环境中的移动和奖励规则。
-
Q-Learning主循环:每回合从起点出发,采用$\\epsilon$-贪婪策略探索,更新Q表。
-
get_optimal_path:利用训练好的Q表,从起点出发,按最优策略走到终点,记录路径。
-
可视化:用matplotlib画出最优路径,终点用绿色G标记,路径用红色圆点标记。
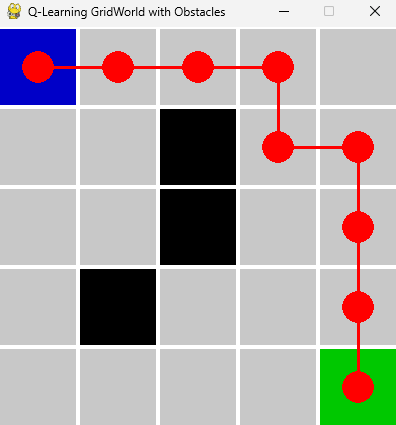
九、(复杂版)强化学习案例流程与代码演示(GridWorld + 障碍物 + pygame 可视化)
1. 环境设定
-
5x5 网格世界,智能体起点 (0,0),终点 (4,4)
-
有若干障碍物(如(1,2)、(2,2)、(3,1)),智能体不能走进障碍格
-
每步奖励 -1,走进终点奖励 +10,碰到障碍物奖励 -5(并停在原地)
-
四个动作:上、下、左、右
2. Q-Learning 流程
-
初始化 Q 表为 0
-
每回合从起点出发,最多走 max_steps 步
-
按
-
执行动作,获得新状态和奖励
-
若撞到障碍物,奖励 -5,停在原地
-
若到终点,奖励 +10,回合结束
-
否则奖励 -1
-
-
按 Q-Learning 公式更新 Q 表
-
多回合训练后,Q 表收敛,智能体学会避开障碍、走最短路
3. Python代码实现(含pygame可视化)
1)安装依赖(Dependency)
pip install pygame numpy2)完整代码
import numpy as npimport pygameimport sysimport time# 环境参数n_states = 5actions = [\'up\', \'down\', \'left\', \'right\']action_dict = {0: (-1, 0), 1: (1, 0), 2: (0, -1), 3: (0, 1)}goal_state = (4, 4)obstacles = [(1,2), (2,2), (3,1)]# Q表初始化Q = np.zeros((n_states, n_states, len(actions)))# Q-Learning参数alpha = 0.1gamma = 0.9epsilon = 0.2episodes = 1000max_steps = 50def step(state, action): x, y = state dx, dy = action_dict[action] nx, ny = x + dx, y + dy # 边界处理 nx = min(max(nx, 0), n_states - 1) ny = min(max(ny, 0), n_states - 1) next_state = (nx, ny) if next_state in obstacles: reward = -5 next_state = state # 碰到障碍物停在原地 done = False elif next_state == goal_state: reward = 10 done = True else: reward = -1 done = False return next_state, reward, done# Q-Learning主循环for episode in range(episodes): state = (0, 0) for step_count in range(max_steps): if np.random.rand() 0: prev = path[idx-1] start = (prev[1]*CELL_SIZE + CELL_SIZE//2, prev[0]*CELL_SIZE + CELL_SIZE//2) pygame.draw.line(screen, (255,0,0), start, center, 3) pygame.display.flip()# 展示最优路径动画for i in range(1, len(optimal_path)+1): draw_grid(optimal_path[:i]) for event in pygame.event.get(): if event.type == pygame.QUIT: pygame.quit() sys.exit() time.sleep(0.5)# 等待关闭while True: for event in pygame.event.get(): if event.type == pygame.QUIT: pygame.quit() sys.exit()代码说明
-
环境定义:障碍物用黑色格子,起点蓝色,终点绿色。
-
Q-Learning训练:遇到障碍物会被惩罚并停在原地,终点奖励高。
-
路径获取:智能体按最优策略走到终点,自动避开障碍。
-
pygame动画:动态展示最优路径,红色圆点和线段显示智能体移动轨迹。
你可以直接运行这段代码,看到智能体如何学会避开障碍、走最优路径,并用pygame动态展示全过程。如果需要更大地图、更多障碍、不同奖励设计或更酷的可视化。
十、强化学习的优缺点与工程建议
优点:
-
能解决无标签、反馈稀疏、动态决策等复杂问题
-
适应性强,可自主探索最优策略
-
理论基础扎实,适合长期收益优化场景
缺点:
-
训练效率低,样本利用率不高
-
对环境建模、奖励设计敏感
-
训练过程可能不稳定,调参复杂
工程建议:
-
环境建模和奖励函数设计需贴合实际目标
-
结合模拟、并行采样等手段提升训练效率
-
可用深度学习(DQN、PPO等)扩展到高维感知任务
十一、总结
强化学习通过智能体与环境的交互、试错和奖励反馈,最终学会最优策略,是解决序列决策和长期收益优化问题的强大工具。理解MDP、贝尔曼方程、Q-Learning、策略梯度等核心理论与算法,有助于你在智能控制、自动决策等前沿场景中发挥强化学习的威力。
注:还没看上部分的伙伴记得先回去看看喔~会对理解这部分有帮助喔!
谢谢你看到这里,你们的每个赞、收藏跟转发都是我继续分享的动力。
如需进一步案例、代码实现或与其他聚类算法对比,欢迎留言交流!我是爱酱,我们下次再见,谢谢收看!


