STM32F103与RX8025 RTC芯片驱动开发
本文还有配套的精品资源,点击获取 
简介:RX8025是一款高精度实时时钟芯片,而STM32F103微控制器则是基于ARM Cortex-M3内核的嵌入式设计常用部件。本驱动程序专为实现STM32F103与RX8025之间的有效通信而设计,涵盖了初始化、时间读取、时间设置、报警配置等关键功能。文章将详细介绍驱动程序的组成部分,以及如何通过此驱动在各种应用中集成精确的实时时钟功能。 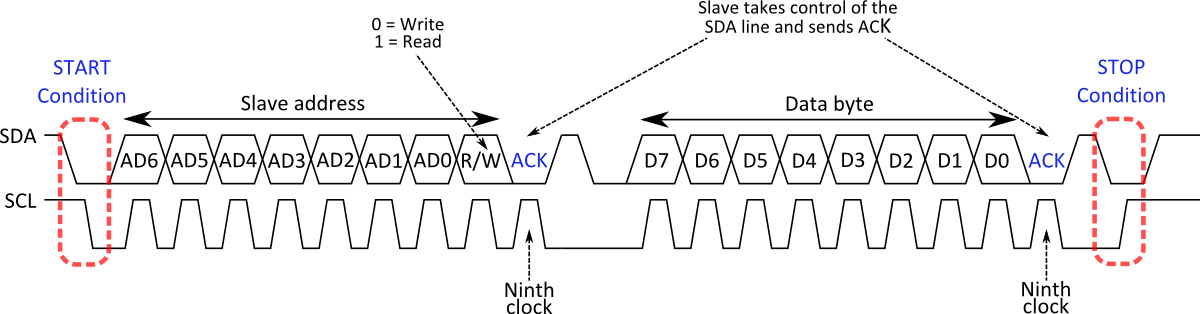
1. RX8025高精度实时时钟芯片介绍
1.1 RX8025芯片概述
RX8025是一款高精度实时时钟(RTC)芯片,广泛应用于需要长时间保持时间准确性的电子设备中。它具备内部振荡器、低功耗模式和丰富的报警功能,能够满足多种复杂应用场景的需求。
1.2 核心特性
该芯片主要特点包括秒表计数、闰年补偿、32.768 kHz频率输出等。它支持多种编程模式和电源管理功能,通过I2C接口与微控制器(MCU)通信,可实现对时间的精确控制和实时调整。
1.3 应用领域
RX8025适用于智能家居、工业控制、数据记录和各种电池供电的便携式设备等。它的高精度和低功耗特性,使其在现代电子产品设计中备受欢迎。
- 精确的时间控制对于智能家居系统至关重要,例如用于调整照明设备、确保通信设备时间同步等功能。- 在数据记录系统中,RX8025可以确保记录数据的时间戳精确无误,这对于分析和监控系统性能至关重要。通过理解RX8025的基本功能和应用领域,开发者可以在后续章节中进一步了解如何将该芯片集成到各种电子系统中,以及如何通过编程实现特定功能。
2. STM32F103微控制器特点及应用
2.1 STM32F103概述
STM32F103是由STMicroelectronics生产的一款高性能微控制器,属于STM32F1系列。该系列基于ARM Cortex-M3处理器,拥有丰富的外设接口以及高级特性,适合于中等复杂度的应用需求。STM32F103以其高性能、低功耗、丰富的集成外设和价格优势,在工业、医疗和消费类产品中获得了广泛应用。
STM32F103的内核工作频率高达72MHz,具有32位算术运算能力,内部集成有128KB到1MB的闪存、多种通信接口和丰富的模拟外设,包括但不限于ADC、DAC、定时器以及I2C、SPI、USART通信接口。这些特点使STM32F103在实时应用中表现优异。
2.2 核心性能
2.2.1 处理器性能
- 处理器核心 :基于ARM Cortex-M3处理器核心,运行效率高,执行指令速度达到1.25 DMIPS/MHz。
- 时钟系统 :支持内部和外部的高速时钟源,包括内部高速时钟(HSI)、内部低速时钟(LSI)、外部高速时钟(HSE)和外部低速时钟(LSE),并且支持PLL。
2.2.2 存储器特性
- 程序存储 :提供从128KB到1MB的内部闪存,用于程序和数据存储。
- 数据存储 :拥有高达64KB的SRAM,用于临时存储数据和变量。
2.3 外设与接口
STM32F103拥有丰富的外设接口,是其广泛应用于多种领域的关键原因:
2.3.1 通信接口
- I2C/SPI/USART :可以用于各种标准和定制通信协议。
- USB 2.0接口 :支持全速功能设备,USB接口用于高速数据传输或直接作为设备连接PC。
2.3.2 模拟外设
- ADC :12位模数转换器,支持多达16个通道,可实现精确的模拟信号采集。
- DAC :支持双通道12位数字模拟转换器。
2.3.3 定时器
- 基本定时器 :用于产生精确的时间延迟和测量时间间隔。
- 高级控制定时器 :用于电机控制和高级定时任务。
2.4 应用实例
STM32F103广泛应用于多个领域,其特性满足了不同应用的需求:
2.4.1 工业控制
- PLC控制器 :用于实时监控和控制各种工业自动化过程。
- 传感器数据采集 :处理来自温度、压力、湿度等传感器的数据。
2.4.2 医疗设备
- 便携式诊断设备 :用于处理生理信号,并实时显示结果。
- 健康监测设备 :用于记录患者的生命体征数据。
2.4.3 消费电子产品
- 智能家居设备 :如智能灯光控制器、智能插座等。
- 可穿戴设备 :如智能手表、健身追踪器等。
在接下来的章节中,我们将深入了解如何将STM32F103应用于与RX8025实时时钟芯片的整合,并进一步探究其驱动程序的实现。
3. RX8025驱动程序功能实现
3.1 初始化与配置
在嵌入式系统中,初始化和配置是确保硬件组件正确运行的关键步骤。本小节将介绍RX8025实时时钟(RTC)芯片的初始化过程以及必要的配置步骤,以确保其与STM32F103微控制器的无缝对接。
3.1.1 硬件连接及初始化序列
RX8025芯片通常通过I2C接口与微控制器通信。硬件连接包括将RX8025的SCL和SDA引脚连接至STM32F103的相应I2C总线引脚上。电源(VDD)和地(GND)引脚也要正确连接。为了确保数据传输的准确性,还需添加上拉电阻至SCL和SDA线路。
初始化序列如下: 1. 启动STM32F103的I2C模块,并将其设置为主机模式。 2. 将RX8025的地址(通常为0x68或0x69,取决于地址引脚的电平状态)发送到I2C总线上,以开始与RX8025通信。 3. 对于RX8025的寄存器进行必要的初始化设置,这些寄存器负责控制时间格式、振荡器控制、闹钟设置等。
以下是初始化序列的示例代码块:
/* 初始化代码示例 *//* 1. 启动I2C */I2C1_Init();/* 2. 写入RX8025初始化寄存器 */uint8_t init_data[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00};I2C_Write(RX8025_ADDRESS, init_data, sizeof(init_data));3.1.2 驱动初始化流程详解
驱动初始化流程需要精心设计,以确保所有操作的准确性和效率。流程通常包括: 1. 检查RX8025芯片是否已正确连接到STM32F103。 2. 读取RX8025的时钟状态,检查其是否正常运行。 3. 设置时间、日期和其它配置参数,如夏令时选项和报时功能。 4. 测试RX8025的时间读取和设置功能,确保其准确性。
下面是一个简化的流程图,说明了RX8025初始化的过程:
graph LR A[开始初始化] --> B[检查硬件连接] B --> C[确认RX8025响应] C --> D[配置时钟运行模式] D --> E[设置初始时间/日期] E --> F[验证时间和日期准确性] F --> G[完成初始化]3.2 时间读取与设置
正确地读取和设置时间是实时时钟模块的主要功能之一。本小节将深入探讨如何通过RX8025驱动程序实现这一功能。
3.2.1 时间读取机制与方法
时间读取通常涉及对RX8025内部寄存器的访问。以下是实现时间读取步骤的代码:
/* 时间读取代码示例 */uint8_t rx_data[7];I2C_Read(RX8025_ADDRESS, rx_data, sizeof(rx_data));uint8_t second = rx_data[0] & 0x7F; // 读取秒,并确保它不是二进制编码的十位uint8_t minute = rx_data[1] & 0x7F; // 读取分钟uint8_t hour = (rx_data[2] & 0x3F); // 读取小时,保证它不是12/24小时制的转换// 将读取的数据转换为可读格式// 例如,转换为字符串或其他数据结构3.2.2 时间设置接口与程序控制
要设置时间,首先需要将秒、分、时等信息写入到相应的寄存器中。在设置时间时,有两点需要注意: 1. 在写入时间数据之前,通常需要停止时钟计数器,以避免在写入过程中发生时间跳变。 2. 设置完成后,必须重新启动时钟计数器。
以下代码示例展示了如何设置时间:
/* 时间设置代码示例 */uint8_t tx_data[7] = {0};tx_data[0] = (second & 0x7F) | (oscillator_stop << 7); // 如果需要停止振荡器则设置oscillator_stoptx_data[1] = minute & 0x7F;tx_data[2] = hour & 0x3F;// 其余数据用于设置日期等信息// 停止时钟计数器I2C_Write(RX8025_ADDRESS, tx_data, 3);// 设置其他寄存器...// 重新启动时钟计数器tx_data[0] &= ~(oscillator_stop << 7);I2C_Write(RX8025_ADDRESS, tx_data, 3);3.3 报警功能配置
报警功能是许多实时时钟模块中的一个实用特性。它允许设备在特定时间点或事件发生时触发中断或通知。
3.3.1 报警功能介绍及应用需求
RX8025提供了独立的秒、分、小时和日期报警功能。根据应用需求,可以设置一个或多个报警条件。例如,对于电池供电设备来说,可以在特定时间唤醒设备进行检查或维护。
3.3.2 报警设置的实现步骤
实现报警功能主要涉及对报警寄存器的配置。通过设置这些寄存器,可以定义触发报警的确切时间。下面是一个简化的代码块,展示了如何设置报警:
/* 报警设置代码示例 */uint8_t alarm_data[4];alarm_data[0] = (alarm_second & 0x7F) | (alarm_enable << 7); // 根据需要设置报警启用位alarm_data[1] = alarm_minute & 0x7F;alarm_data[2] = alarm_hour & 0x3F;alarm_data[3] = alarm_day & 0x7F;// 写入报警寄存器I2C_Write(RX8025_ALARM_ADDRESS, alarm_data, sizeof(alarm_data));3.4 电源管理与错误处理
电源管理和错误处理是确保系统稳定运行的重要方面。在本小节中,我们将讨论如何管理RX8025的电源模式并处理可能出现的错误。
3.4.1 电源模式与低功耗设计
RX8025支持多种电源模式,包括正常运行模式和低功耗模式。在低功耗模式下,RX8025可以大幅度降低电流消耗,这对于便携式和电池供电设备尤为重要。要进入低功耗模式,需要设置特定的寄存器位。
以下是如何设置低功耗模式的示例代码:
/* 低功耗模式设置代码示例 */uint8_t power_mode_data[1];power_mode_data[0] = (power_mode_value & 0x03) << 4; // 设置低功耗模式值// 写入寄存器以配置电源模式I2C_Write(RX8025_ADDRESS, power_mode_data, sizeof(power_mode_data));3.4.2 常见错误识别与处理策略
在操作RX8025时,可能会遇到各种错误,例如通信错误或寄存器设置错误。有效的错误处理策略应该包括: 1. 检测和识别错误条件。 2. 记录错误事件。 3. 根据错误类型采取适当的操作,如重试、报告或重置。
下面是一个简单的表格,用于分类和处理常见错误:
| 错误类型 | 处理策略 | |----------------------|------------------------------| | I2C通信超时 | 重新初始化I2C接口或增加重试次数 | | 寄存器读写失败 | 检查硬件连接和寄存器地址 | | 时间设置不准确 | 校准时钟或重置RTC模块 | | 电池电压低 | 报告电池更换或进入低功耗模式 |
通过以上策略的实施,可以显著提高系统的稳定性和可靠性。
4. 驱动程序组成部分
驱动程序对于任何硬件设备来说都是至关重要的。它不仅确保了硬件设备与操作系统之间的正确通信,还提供了设备功能的实现和优化。在这一章节中,我们将深入探讨RX8025驱动程序的不同组成部分及其具体实现细节。这些部分共同构成了驱动程序的基础,并支持RX8025实时时钟芯片的功能。
4.1 I2C通信模块
4.1.1 I2C通信协议基础
I2C(Inter-Integrated Circuit)是一种多主机、多从机的串行通信协议。它使用两条线进行通信:一条是串行数据线(SDA),另一条是串行时钟线(SCL)。I2C协议的主要特点是它的硬件连接简单,只需要一个双向数据线和一个时钟线即可完成通信。同时,I2C支持多个从机设备,每个从机设备都有一个唯一的地址,主机通过地址识别不同的从机。
在实现I2C通信模块时,需要考虑以下几个关键点:
- 时钟速率 :I2C的时钟速率可以是标准模式(100kHz)或快速模式(400kHz),在初始化时需要设置。
- 地址识别 :RX8025的设备地址是固定的,驱动程序需要识别这个地址来选择正确的从机设备。
- 数据传输 :数据传输遵循开始信号、设备地址、读/写位、应答信号、数据字节和停止信号的顺序。
4.1.2 I2C模块的实现与优化
在微控制器(如STM32F103)上实现I2C通信模块,需要使用相应的库函数或直接操作硬件寄存器。以下是使用STM32 HAL库实现的基本步骤:
- 初始化I2C句柄结构体,配置I2C参数如时钟速率、地址模式等。
- 启动I2C,并设置为I2C主机模式。
- 进行数据传输,包括发送起始信号、发送设备地址、读写操作、应答/非应答信号以及发送停止信号。
I2C_HandleTypeDef hi2c1;void I2C_Init(void) { hi2c1.Instance = I2C1; hi2c1.Init.ClockSpeed = 400000; // 设置400kHz的通信速率 hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; hi2c1.Init.OwnAddress1 = 0; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c1.Init.OwnAddress2 = 0; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; HAL_I2C_Init(&hi2c1);}在优化I2C模块时,应考虑以下几点:
- 时钟管理 :合理配置I2C时钟速率和占空比,避免通信错误。
- 错误处理 :实现必要的错误检测机制,比如检测通信失败时重试机制。
- 性能优化 :在满足实时性要求的前提下,尽量减少通信次数和数据量,以减少功耗。
4.2 RTC功能模块
4.2.1 RTC核心功能概述
实时时钟(RTC)模块是RX8025芯片的核心功能之一,它能够提供精确的时间信息,并且具备闰年补偿、时钟偏差自动修正和计时中断输出等功能。在设计RTC功能模块时,主要需要关注以下几个方面:
- 时间读取与设置 :通过I2C通信读取或设置当前的日期和时间。
- 闹钟功能 :用户可以根据需要设置一个或多个闹钟事件。
- 计时器/计数器功能 :提供一个或多个用于计时或计数的计时器。
- 时间校准 :通过外部事件或内部算法对时间进行校准。
4.2.2 功能模块编程实现细节
为了实现RTC功能模块,我们需要编写一系列的函数来处理时间的读取、设置、校准和闹钟配置等。以下是一个简化的代码示例,展示了如何读取当前时间:
void RTC_GetTime(uint8_t* hour, uint8_t* minute, uint8_t* second) { uint8_t data[3]; HAL_I2C_Mem_Read(&hi2c1, RX8025_ADDRESS, RTC_TIME_REG, I2C_MEMADD_SIZE_8BIT, data, 3, 1000); *hour = data[0]; *minute = data[1]; *second = data[2];}在编写代码时,应当注意到以下细节:
- 数据格式化 :从寄存器中读取的数据需要格式化为可读的时间格式。
- 数据一致性 :在读取时钟数据时,应确保数据的一致性,避免时间读取过程中的数据错乱。
- 功能集成 :将时间设置、闹钟和校准等独立功能集成到模块中,确保模块能够满足多样化的需求。
4.3 中断服务程序
4.3.1 中断系统在RTC中的作用
中断服务程序(ISR)在RTC中起着至关重要的作用,它负责响应RTC模块产生的中断事件。这些事件可能是计时器溢出、闹钟时间到达、时间校准完成等。中断服务程序需要快速且有效地处理这些事件,确保系统的响应性和稳定性。
关键点包括:
- 中断优先级 :为不同的中断事件配置合适的优先级,确保关键事件能够得到及时处理。
- 中断响应时间 :最小化中断服务程序的处理时间,以减少对系统性能的影响。
- 状态保存与恢复 :在中断服务程序中,保存和恢复必要的系统状态,确保系统的连续性和稳定性。
4.3.2 中断服务程序的设计与实现
设计中断服务程序通常需要考虑以下步骤:
- 使能中断并初始化中断系统。
- 在中断服务程序中编写中断处理逻辑。
- 清除中断标志位,以便于下一次中断的产生。
以下是一个简化的中断服务程序设计示例:
void RTC_IRQHandler(void) { if (/* 检测到时间更新中断 */) { // 处理时间更新事件 } if (/* 检测到闹钟中断 */) { // 处理闹钟事件 } /* 清除中断标志位 */ __HAL_I2C_CLEAR_FLAG(&hi2c1, ...);}实现中断服务程序时,需要注意以下事项:
- 事件处理逻辑 :确保中断服务程序中包含所有必要的事件处理逻辑。
- 异常处理 :加入异常处理机制,确保在中断服务程序中出现错误时能够正确处理。
- 性能优化 :在保持代码简洁性的同时,进行性能优化,以减少中断对主程序的影响。
4.4 错误处理模块
4.4.1 错误类型与检测机制
在驱动程序中,错误处理模块是确保系统稳定运行的关键部分。它负责检测、诊断和处理各种可能发生的错误情况,例如:
- 通信错误 :包括I2C总线错误、超时、数据传输失败等。
- 硬件故障 :如RTC模块损坏、电池电量不足等。
- 软件逻辑错误 :如时间设置不合法、读取时间出错等。
检测机制需要覆盖以上所有可能发生的错误类型,并提供清晰的错误日志,方便问题的诊断和调试。
4.4.2 错误处理模块的实现与测试
实现错误处理模块,需要结合具体的硬件和软件环境,设计出一套健壮的错误处理流程。以下是一些基本的实现步骤:
- 在代码中为每个可能的错误设置错误代码。
- 在异常情况发生时,记录错误日志并提供相应的处理策略。
- 通过测试验证错误处理模块的有效性。
#define ERR_TIME_SET_FAIL 0x01#define ERR_TIME_READ_FAIL 0x02#define ERR_I2C_ERROR 0x03void HandleRTCError(uint8_t error_code) { switch(error_code) { case ERR_TIME_SET_FAIL: // 处理时间设置失败 break; case ERR_TIME_READ_FAIL: // 处理时间读取失败 break; case ERR_I2C_ERROR: // 处理I2C通信错误 break; default: // 未知错误处理 break; }}在测试错误处理模块时,需要考虑以下几点:
- 模拟错误场景 :尽可能模拟各种错误场景,确保错误处理模块能够覆盖所有预期的错误。
- 边界条件测试 :测试模块在边界条件下的表现,比如在极低的电池电压下或者极端温度下。
- 自动化测试 :通过自动化测试脚本对错误处理模块进行持续测试,以提高其可靠性和鲁棒性。
通过上述各部分的详细阐述,我们可以看到RX8025驱动程序的组成部分是复杂而多样的。每一个模块都有其独特的角色和实现要求,它们共同工作,确保实时时钟芯片能够稳定、高效地运行,并在各种应用场景中发挥其应有的作用。
5. 驱动在实际应用中的使用场景
5.1 嵌入式系统时间同步
在嵌入式系统中,时间同步是保障系统准确性和可靠性的关键技术之一。随着物联网(IoT)技术的发展,越来越多的嵌入式设备需要与中央服务器或其他设备保持时间一致性,以实现高效的数据交换和准确的事件排序。
5.1.1 时间同步的必要性与挑战
时间同步对于需要精确时间记录的日志、事件处理、安全系统等是必不可少的。网络时间协议(NTP)是一种广泛使用的协议,它允许设备通过网络与时间服务器同步时间。然而,在没有网络或者网络不稳定的情况下,设备就需要依赖内部的实时时钟(RTC)来维持时间的准确性。
在实际应用中,时间同步面临的主要挑战包括:
- 时间精度的保持:由于环境温度变化、晶振老化等因素,内部的RTC可能会出现时间漂移。
- 系统的能耗问题:为保持时间同步,某些同步机制可能会导致设备功耗增大。
- 多时区和夏令时等复杂情况的处理:需要动态调整时间,且这些调整要与外部同步。
5.1.2 驱动在时间同步中的作用
驱动程序为硬件和软件之间提供了桥梁,尤其是在处理时钟设备如RX8025时,确保时间同步的精确性和稳定性。
- 定时更新:驱动程序负责定期检查RTC与NTP服务器的时间,自动进行时间同步。
- 精度校准:驱动程序利用外部校准信号或者根据设备运行特点进行时间校准。
- 低功耗模式下的时间维护:驱动程序确保在低功耗模式下,时间更新和维护不会对设备能耗产生显著影响。
5.2 数据记录与监控系统
在许多应用场景,如工业生产、医疗记录、环境监控等,都需要连续记录大量数据,并在关键时刻提供实时监控。
5.2.1 实时数据记录的需求分析
实时数据记录需要满足以下关键需求:
- 高效率:数据记录速度要与数据采集速度匹配,确保不丢失数据。
- 完整性:记录的数据应当完整无误,以便后续分析。
- 可靠性:系统必须能够在各种环境下稳定运行,记录数据。
5.2.2 驱动在数据记录与监控中的应用
使用RX8025驱动程序和STM32F103微控制器,可以实现高效可靠的数据记录系统:
- 实时时间戳:每次记录数据时,驱动程序会提供准确的时间戳,确保数据的时间相关性。
- 容错机制:驱动程序在数据记录过程中包含错误检测和处理,防止数据损坏。
- 持续监控:结合定时器中断,驱动程序支持定期数据检查,并在异常情况下发出报警。
5.3 电池供电设备的低功耗设计
便携式和远程监控设备通常依赖于电池供电,因此,设计低功耗的电池供电设备是延长设备使用时间的关键。
5.3.1 低功耗设计的重要性
低功耗设计有以下几个主要方面:
- 续航力:延长电池寿命,减少频繁充电或更换电池的需要。
- 环保:降低能耗,减少设备运行对环境的影响。
- 设备性能:在低功耗模式下保证关键功能的运行,提升用户体验。
5.3.2 驱动如何支持低功耗模式
为了支持低功耗设计,RX8025的驱动程序提供了几种节能功能:
- 省电模式:驱动程序能够控制RX8025进入低功耗模式,并在需要时快速唤醒。
- 中断驱动:使用外部事件或定时中断来触发数据读取,避免持续的轮询操作。
- 动态电源管理:根据实际应用需求,动态调整RTC模块的电源供应。
5.4 智能家居与自动化控制
智能家居系统正在变得越来越流行,这得益于它们提供的便利性和能效。
5.4.1 智能家居时间管理功能需求
智能家居对时间管理功能有以下需求:
- 精确控制:对灯光、加热、安全系统等进行时间精确控制。
- 节能策略:根据家庭成员的活动模式自动调整能耗。
- 事件调度:通过时间触发特定事件,如定时播放音乐、开启窗帘等。
5.4.2 驱动在智能家居系统中的实现策略
驱动程序在智能家居系统中的应用策略包括:
- 时间同步:驱动程序保证所有设备上的时间都是准确同步的。
- 模式识别:驱动程序能够根据历史数据学习用户的生活习惯,优化设备的工作时间。
- 灵活控制:提供标准化的接口,方便集成到智能家居的中央控制系统中。
综上所述,RX8025驱动程序在多种实际应用场景中发挥着重要的作用,它保证了时间信息的准确性和设备的高效运行,为开发者和最终用户带来了极大的便利。在嵌入式系统的时间同步、数据记录与监控、电池供电设备的低功耗设计以及智能家居的自动化控制等方面,驱动程序都是不可或缺的一部分。
本文还有配套的精品资源,点击获取
简介:RX8025是一款高精度实时时钟芯片,而STM32F103微控制器则是基于ARM Cortex-M3内核的嵌入式设计常用部件。本驱动程序专为实现STM32F103与RX8025之间的有效通信而设计,涵盖了初始化、时间读取、时间设置、报警配置等关键功能。文章将详细介绍驱动程序的组成部分,以及如何通过此驱动在各种应用中集成精确的实时时钟功能。
本文还有配套的精品资源,点击获取

