无人机航测内业处理(iTwin Capture Modeler)
iTwin Capture Modeler 内业处理
1、概述
本文以iTwin Capture Modeler(旧名称为Context Capture或Smart3D)软件为例介绍航测建模、土方算量、三维模型在线发布分享等内业处理。
本机所使用笔记本电脑主要配置:
CPU:intel Core Ultra 9 275HX
显卡:NVIDIA GeForce RTX 5070 Ti Laptop GPU 12GB
内存:32GB
注意:内存大小决定是否可以成功建模,内存不足建模失败(不会提示失败原因),推荐16GB以上;硬盘剩余容量建议为建模图片大小的2~3倍,否则会因为容量不足建模失败。
2、内业数据处理
2.1新建工程
打开两个软件,第一个为引擎,建模必须打开,第二个为主程序,第三个为模型浏览查看程序

开始计算空三或者建模时,主程序进度条卡在某一数值时,检查引擎界面是否有任务在执行,若无可按回车键解决,或者重新打开引擎

新建工程,保存路径不能有中文

2.2新建区块
新建区块(也可使用Metashape计算好的空三导入,Metashape空三计算速度更快,但建模质量较低,只生产正射影像可使用Metashape)

2.3导入影像
导入影像,可选择图片或者文件夹

2.4第一次空三
提交第一次空三计算,无需设置参数,第一次空三目的是为了对齐影像,建立连接点


空三完成后查看空三质量报告,主要看位置不确定性数值,越小越好,看自己需求需要几公分的


2.5刺点
点开测量,选择导入自定义文本格式,

选择像控点文件


本工程采用的是北京54,1.5°带,中央子午线为109.5°,需要自定义坐标系

自定义坐标系,点击编辑,选择坐标系prj文件


设置点名及xyz,若导入后在三维视图里面没有显示像控点位置则可能为xy坐标搞反了,重新导入像控点文件即可

刺点:刺点是为了约束平面和高程位置与提高精度,本工程采用当地理论最低潮面为高程0m点,属于地方高程系统,必须刺点;
刺点优先选择标记清晰,位于图片中央的点

2.6第二次空三
刺点完成后,再次提交空三运算,空三参数默认即可
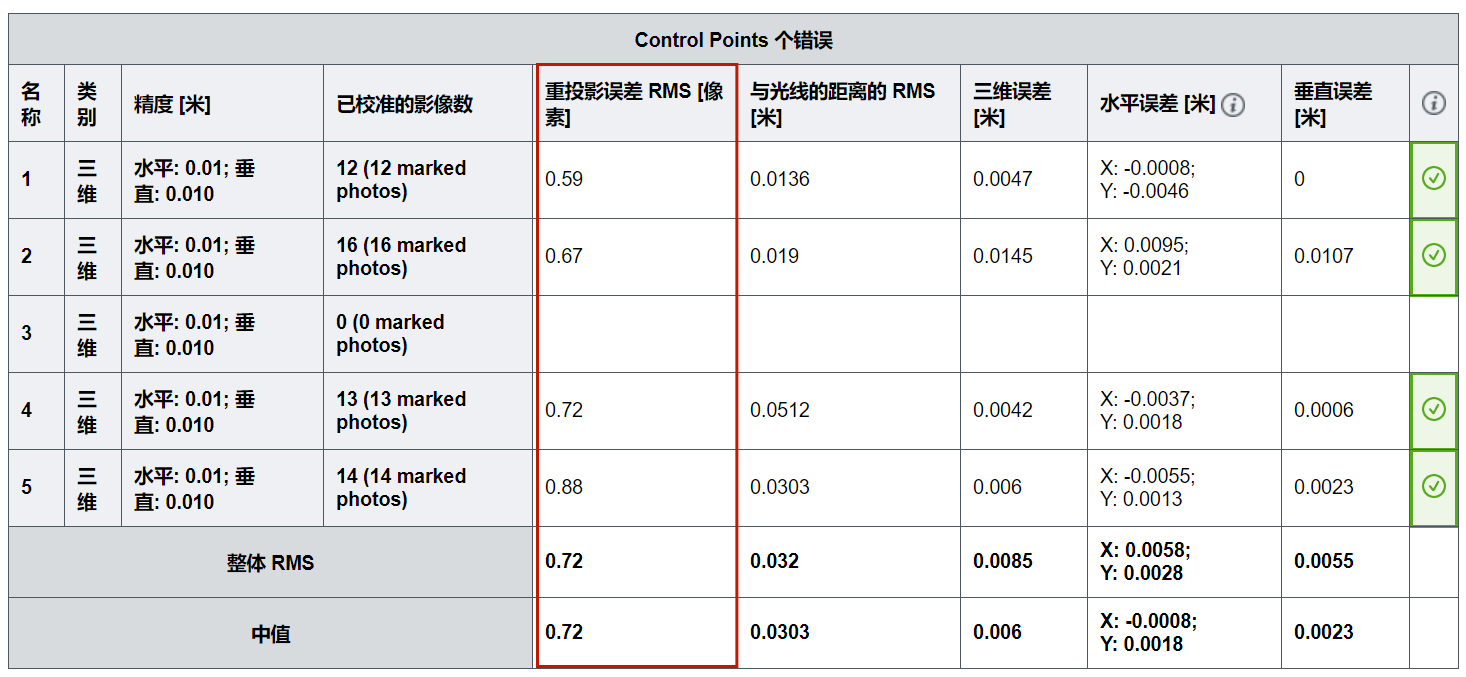
空三完成后查看质量报告,重投影误差控制在1个像素内,若该点误差过大可能为刺点出现问题,或者也可以删除该点
2.7三维重建
选择新建重建框架-三维重建

空间框架中选择要建模的范围,先选择坐标系,如果建模范围为规则矩形可选择框否则使用新建多边形;有具体的范围也可以导入kml文件;切块大小根据自己电脑内存的大小选择,确保内存使用量不大于本机内存的80%
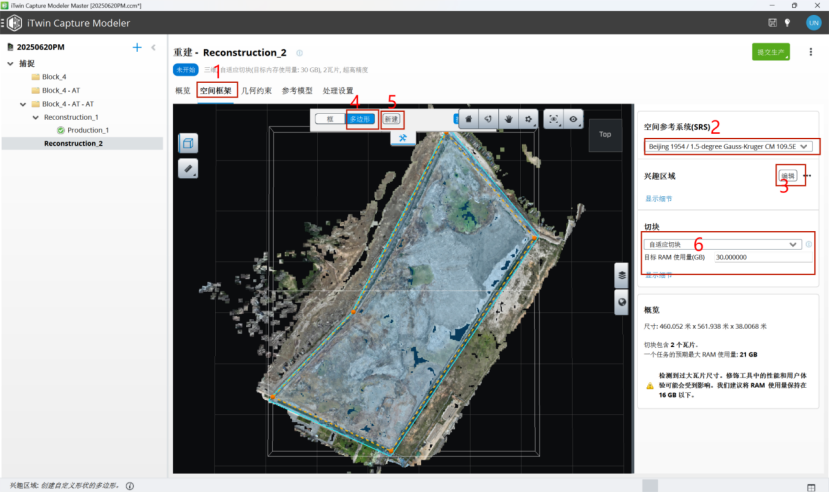
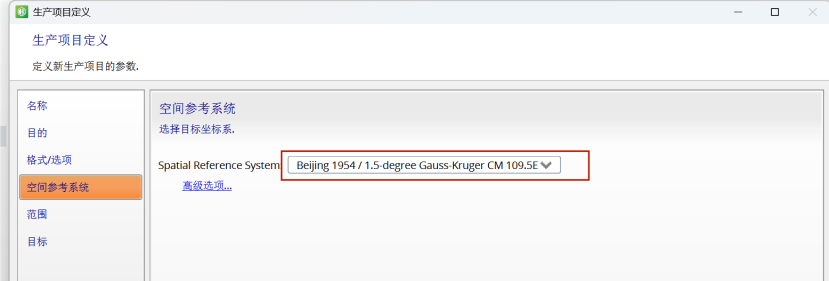
选择生产OSGB文件

坐标系选择北京54
等待生产完成,得到一个xml文件和Date文件夹

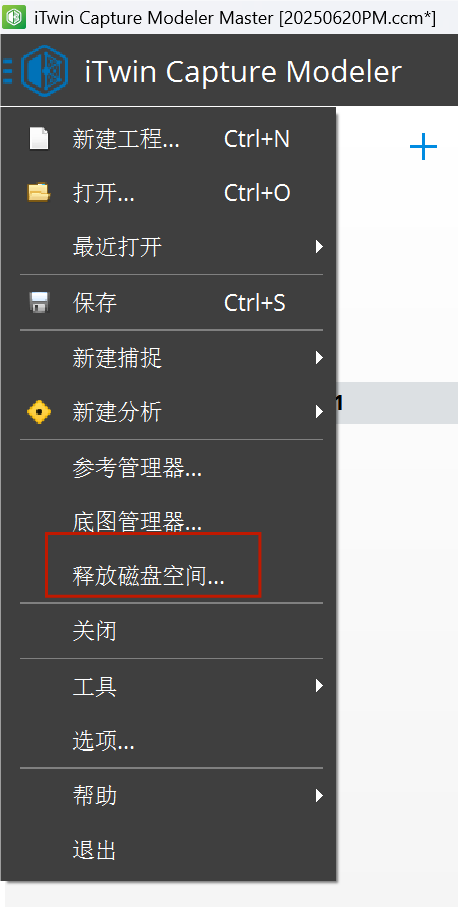
生产完成后删除过程文件,释放磁盘空间
OSGB模型可使用倾斜伴侣查看http://www.osgblab.com/
3、建模精度检查
模型精度检查可采用倾斜伴侣检查,
选择精度检查,浏览控制点文件,选中控制点,在模型上点击标记,最终得到模型精度

4、提取高程点
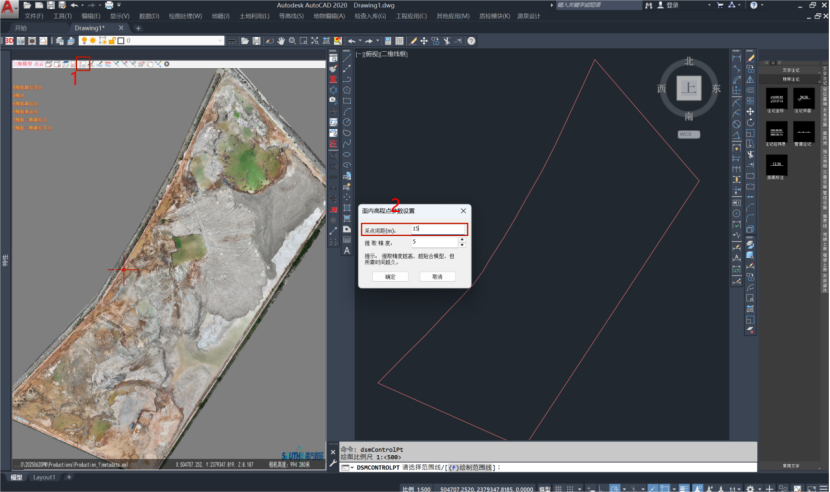
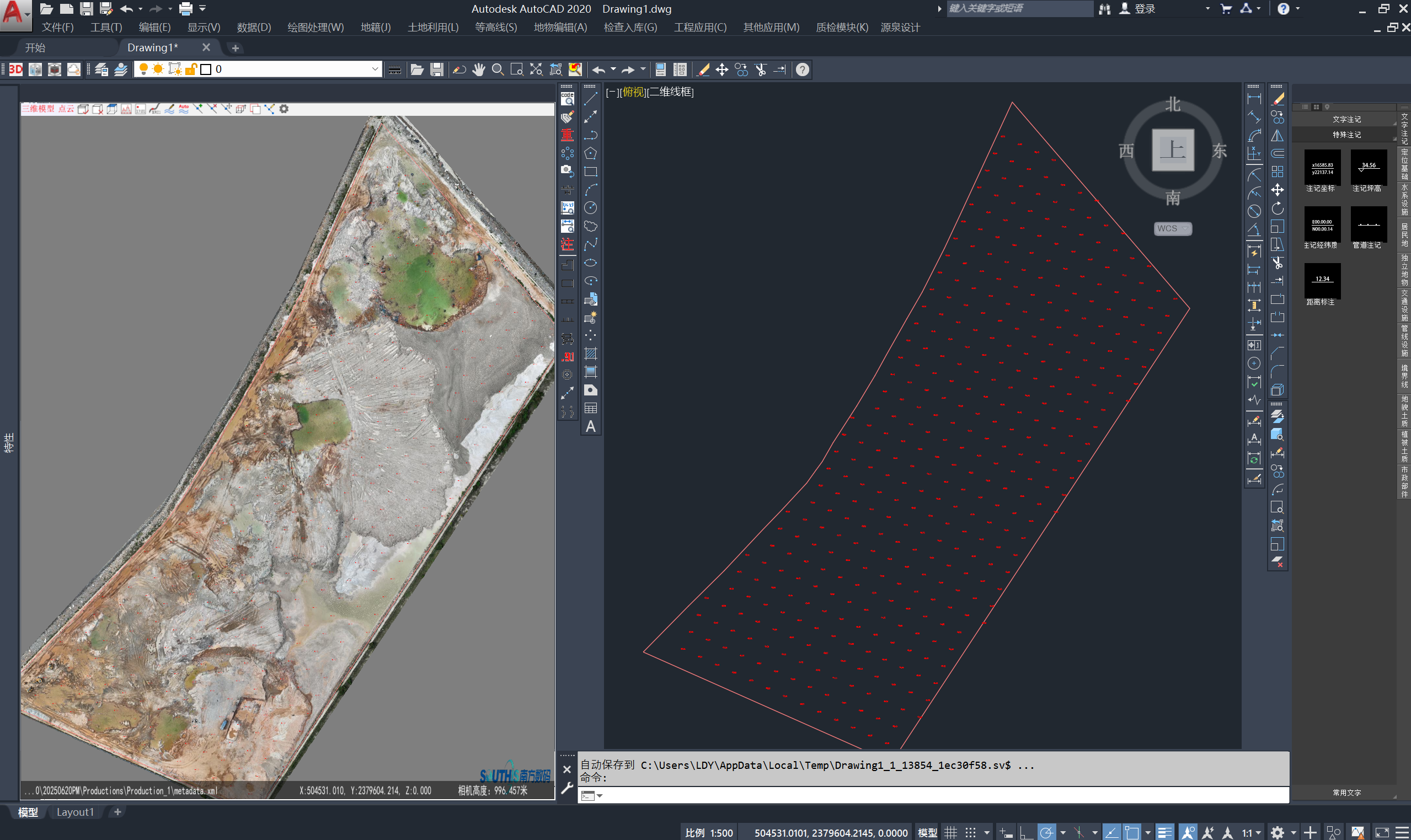
4.1Cass中加载模型
选择3D图标,找到模型所在路径,选择后缀为XML的文件,双击打开

4.2提取高程点
使用闭合范围提取高程点,先绘制要提取高程点的范围线(使用多段线绘制),采点间距按需求选择(本文为10m)
4.3土方算量
利用Cass工程应用计算土方
5、模型分享
倾斜摄影模型在线查看分享可使用中交项目管理系统-CBIM协同实现,可创建场景,叠加卫星影像、BIM模型等信息
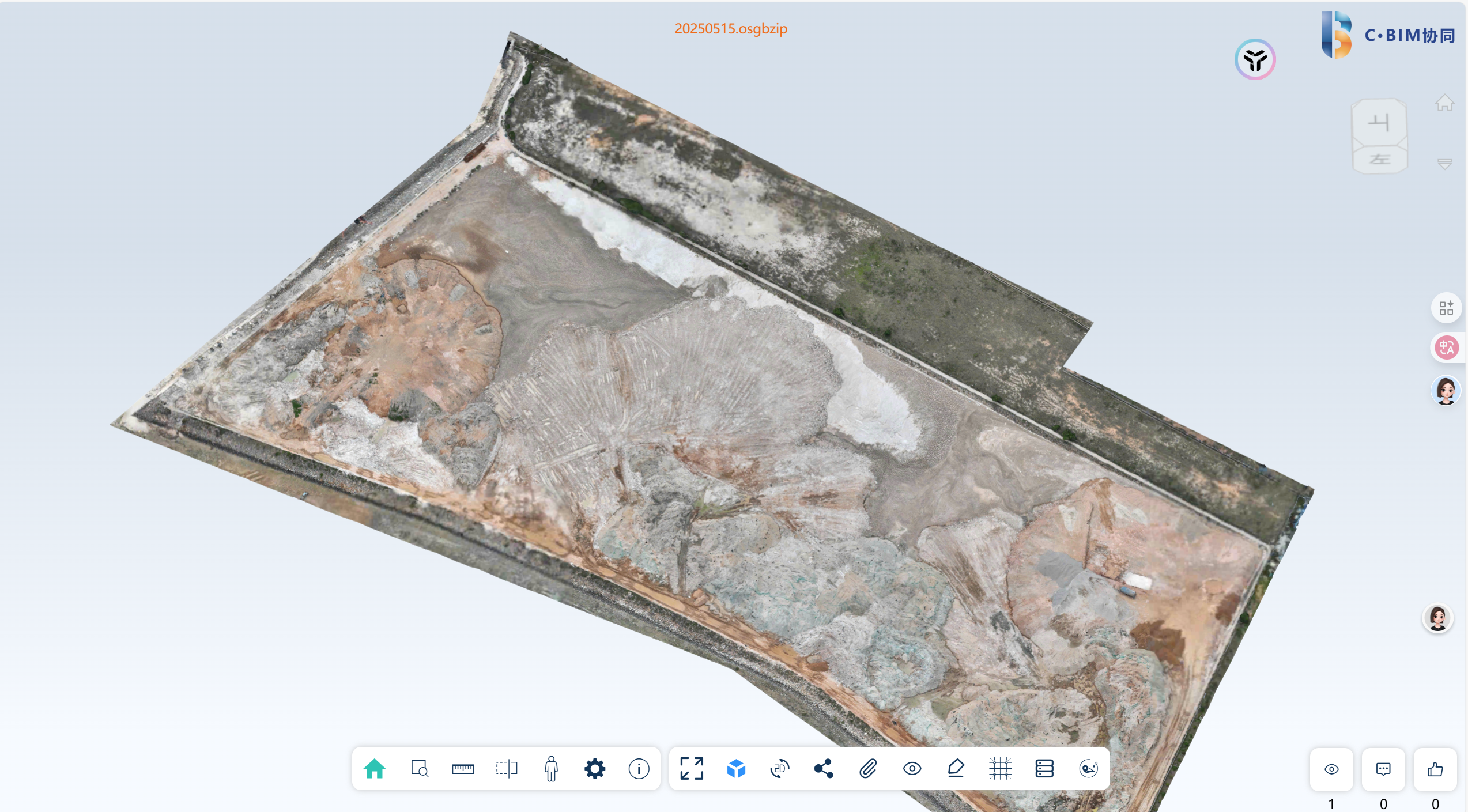

模型分享也可借助第三方平台使用(四维轻云、BIMface等),四维轻云注册用户有10GB空间可用


