视觉感知系统标定(相机)_乘用车鱼眼相机标定
场景1:车道线检测&交通标志识别(前视单目/双目相机)
•核心需求:校正相机镜头畸变(径向、切向),确保图像中车道线、交通标志的几何形状和位置准 确。
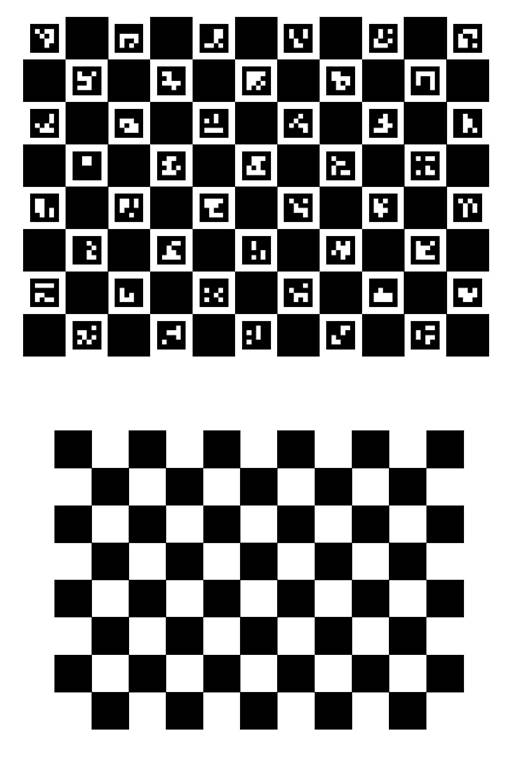
•标定板类型:棋盘格标定板(Checkerboard域圆形网格标定板(Circle Grid)o ChArUco标定板 (Checkerboard + ArUco)在易遮挡场景(如雨雪泥渍)下鲁棒性更佳。
•尺寸规格:
。边长:1.2m × 1.2m (典型车载前视相机)
。格子数量:9列× 12行(或等效密度)
。格子/圆点直径:≈100mm
・为什么是这个尺寸?
。大尺寸(1.2m x 1.2m):确保标定板能覆盖相机视野的60%以上。这是充分捕捉和校正图像边 缘畸变的必要条件。
。格子尺寸(100mm):在典型工作距离(5-8m)下,格子尺寸需保证在图像中占据足够像素 (如>15-20像素/格子边缘),以便算法精准提取角点/圆心。
・摆放规范:
。距离:置于车辆正前方5 - 8米处。此距离约等于相机镜头焦距的2倍,能提供良好的视场覆 盖和深度信息。
。角度:标定板平面需与车身纵轴线严格垂直(可用水平仪辅助)。任何倾斜都会引入标定误 差。
。高度:标定板中心高度应与相机光轴高度一致,通常在地面以上0.8 -1.2米范围内。
。图片建议:图3 -侧视图展示标定板在车前方5-8m,高度与相机光轴齐平,板面垂直车身轴 线。
场景2:环视泊车系统标定(鱼眼/广角摄像头)
・核心需求:对齐车辆四周(前、后、左、右)多个摄像头的图像,消除拼接缝和视角畸变,实现无 缝鸟瞰图。
・标定板类型:多块拼接式标定板或全景环视专用标定板套装(常包含特定图案和定位标记)。

•尺寸规格:
。单块标定板尺寸通常小于前视标定板(如0.8m x 0.8m)。
。整体覆盖区域需大于车辆轮廓(建议车辆四周各留>0.5m空间)。
・为什么是这个尺寸?确保每个鱼眼/广角摄像头在其有效视野边缘也能清晰看到标定板图案,这对 于校正鱼眼畸变和精确拼接至关重要。整体区域大于车辆是为了保证摄像头能\"看到\"用于拼接对齐 的公共特征。
・摆放规范:
。将多块标定板精确摆放在车辆四周地面,形成一个大于车辆外廓的完整框架或特定几何图案。
。标定板表面尽可能水平放置于地面。
。车辆需居中停放于标定板区域内。
二、激光雷达标定(LiDAR)
场景1 :障碍物测距精度校准(反射率&距离)
・核心需求:校准LiDAR在不同距离下对目标反射率的测量精度,补偿信号衰减,确保测距准确性和 对不同反射率物体(车辆、行人、道路设施)的识别能力。
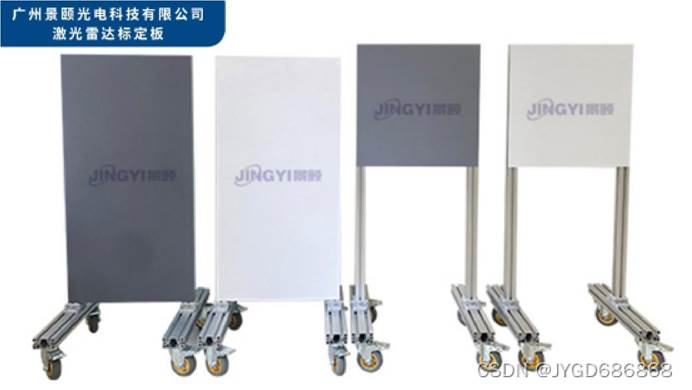
・标定板类型:高反射率平板标定板,表面常设计有反射率阶梯(如10%, 50%, 80%, >90%区域)。
•尺寸规格:
。近S巨离/通用校准:1m x 1m至2m x 2m。
。远距离校准(高速/高架):尺寸需极大化,可达2m x 2m甚至更大(如模拟200m外目标)。
・为什么是这个尺寸?
。近距离:保证LiDAR点云能获得足够多、分布均匀的反射点。
。远距离:LiDAR光束随距离发散。为了在150-200米处,标定板在点云中仍能形成清晰可 辨、具有足够点密度的\"面目标\",其物理尺寸必须非常大(根据发散角计算)。大尺寸确保其 不被误认为点目标,并能评估边缘点云的清晰度。
。反射率阶梯:模拟现实世界中不同材质(低反射率路面、中等反射率车身、高反射率车牌/反 光衣)的反射特性,用于标定反射率-距离关系模型。
・摆放规范:
。放置于LiDAR传感器正前方。
。距离:覆盖LiDAR的主要工作距离范围,特别需要包含最大有效探测距离(如150m, 200m)。需在多个距离点进行标定。
。角度:板面垂直对准LiDAR发射光束方向。
。高度:模拟典型障碍物(车辆、行人)的高度范围。
场景2:空间点云精度校准&多传感器联合标定
・核心需求:校准LiDAR点云本身的几佩青度(内参/外参),或提供精确的物理参考特征用于LiDAR 与相机的时间空间对齐。
・标定板类型:
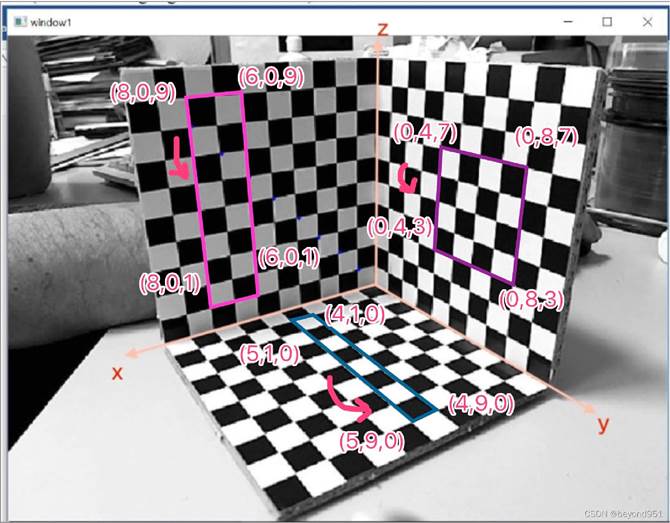
。立体标定板仪口:立方体框架):提供精确的3D角点。
。带视觉特征的LiDAR标定板:同时具有高反射率区域(供LiDAR探测)和棋盘格/ChArUco图案 (供相机识别)。这是LiDAR-相机联合标定的关键。


•尺寸规格:
。基于应用场景确定。联合标定板需保证两种传感器都能清晰获取足够特征。典型尺寸在1mx 1m左右。
。立体结构(如立方体)的边长需精确已知(如0.5m)。
•为什么是这个尺寸?
提供足够的空间分布特征(角点、平面)用于精确计算LiDAR的内外参数或与相机的空间变换关 系。尺寸过小会导致特征点云稀疏或图像特征像素不足,影响精度。
・摆放规范:
。在LiDAR (和相机)视野范围内,多角度、多距离放置。覆盖视野的各个区域(中心、边缘、 不同深度)。
。对于联合标定,需确保标定板同时清晰地出现在LiDAR点云和相机图像中。
。立体标定板需要稳定放置,确保结构不变形。
三、多传感器融合与特殊场景标定
场景1:激光雷达-相机联合时空标定
・核心需求:精确对齐LiDAR点云和相机图像在空间(外参)和时间(同步)上的一致性,实现障碍 物跨模态关联(如将图像中的车尾灯框与点云中的车体关联)。
•标定板类型:专用联合标定板
(核心要素):
。视觉部分:棋盘格或ChArUco图案(提供高精度图像角点/ID)。
。LiDAR部分:高反射率背景/区域(确保点云中清晰可见)。
。可能包含主动发光标记用于高精度时间同步标定。
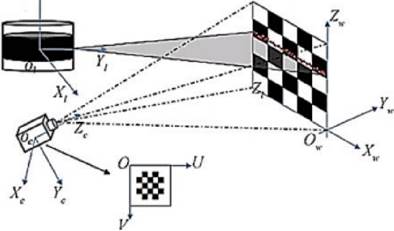
Fig.5 Joint calibration principle of lidar and camera based on checkerboard
・尺寸规格:通常为1m x 1m或更大。需保证在典型工作距离下:
。相机能清晰分辨棋盘格/ArUco码。
。LiDAR能获得高密度、边界清晰的面点云。
・为什么是这个尺寸?
大尺寸提供丰富的、空间分布的特征点对(图像2D点+点云3D点),是精确计算外参矩阵的基 础。ChArUco在部分遮挡时仍能提供ID和角点,鲁棒性更好。
・摆放规范:
。关键:在LiDAR和相机共同视野内,多姿态(不同距离、角度、高度)摆放。
。空间标定:尽可能覆盖传感器视野的各个区域。
。时间同步标定:可能需要快速移动标定板或使用带同步信号(如LED闪烁)的标定板。
场景2:工厂量产自动化标定
・核心需求:在车辆下线时,快速、高精度、自动化地完成所有传感器(相机、LiDAR、雷达)的内 夕卜参标定和车体坐标系对齐。
・标定板类型:
。大型固定背景板:布满高精度棋盘格/ChArUco图案和LiDAR高反射率标记(如反光柱、特定 图案)。
。可移动标定靶标:安装在精密的机器人或定位平台上。
•尺寸规格:
。背景板:需足够大以覆盖车辆四周传感器视野,常见3m x 6m或更大。图案需高精度印刷。
。靶标:尺寸适中(如0.8m x 0.8m),但定位精度要求极高(±1mm甚至更高)。
・为什么是这个尺寸?大背景板允许车辆一次停泊即可完成所有环视、前视等传感器标定,效率最大 化。高精度和自动化是量产核心诉求。环境需严格受控(光照、反射率稳定)。
・摆放规范:
。车辆精确停放在标定工位指定位置(通常有车轮定位器)。
。大型背景板固定在车辆四周墙面或专用框架上。
。移动靶标由自动化系统控制,按预设轨迹在传感器视野内精确运动。

场景3:极端天气(雨雾)&高速动态测试
・核心需求:评估和优化传感器(尤其是LiDAR)在雨雾衰减或高速相对运动下的感知性能。
・标定板类型:
。防水高反射率标定板:表面疏水涂层,反射率可调(模拟不同能见度下目标反射强度变 化)。
。动态标定靶标:安装在高速转台或轨道上(如旋转立方体、横向移动平板)。
•尺寸规格:
。需在对应测试距离下满足尺寸要求(见激光雷达远距离校准)。
。动态靶标尺寸需在高速运动时仍能被稳定追踪(不宜过小)。
・为什么是这个尺寸?雨雾会严重衰减激光信号,要求标定板本身具有极高反射率或可调反射率来模 拟不同衰减程度。动态测试中,靶标尺寸需要保证其在高速相对运动下(如120km∕h)产生的图像 模糊或点云拖曳仍在算法可处理范围内。
・摆放规范:
。雨雾测试:标定板放置在人工模拟雨雾环境中,距离覆盖典型探测范围。
。高速测试:动态靶标放置在测试车辆行驶路径的侧方或前方。关键:精确控制靶标的运动速 度(>100km/h相对速度)和轨迹。测试车辆需在设定速度下(如120km/h)通过。
总结表:标定板选型、尺寸与摆放关键点
应用场景
主要传
感器
首选标定板类型
典型尺寸规 格
尺寸关键考
量
摆放核心要点
1.2m x
覆盖视野
>60%,边缘 畸变校正, 角点提取精 度
正前方5-8m,板
车道线/
相机
棋盘格/Circle
1.2m
面垂直车身,高
标志检测
Grid/ChArUco
(100mm 格 子)
度齐平光轴(0.8-
1.2m)
环视泊车
鱼眼相
多块拼接板/专
单块~0.8m x 0.8m,区 域>车
覆盖鱼眼边 缘视野,提
车辆居中停于地 面标定板组成的 区域
系统标定
机
用套装
供拼接对齐 特征
LiDAR测
近距:1-
远距补偿光
高反板(带反射寸 率阶梯)
束发散,形
正前方,垂直光
距/反射
LiDAR
2 m2;远8巨:
成有效面目
束,多距离(含最
率校准
2m2+
标,评估衰 减
远距)
LiDAR空 间标定/ 联合标定
LiDAR/ 相机
立体结构/带视 觉特征高反板
~1m x 1m
提供丰富空 间特征点对
双传感器共视, 多角度多距离多 姿态
量产自动 化标定
多传感 器
大型背景板+高 精度靶标
背景板3m
x 6m+,靶 标 ~0.8m2
效率最大 化,高精 度,环境受 控
车辆精确定位, 背景板固定,靶 标自动运动
极端天气
(雨雾)
LiDAR测
LiDAR
防水可调反射率 高反板
根据测试距 离确定(宜 大)
模拟衰减, 极高或可调 反射率对抗
置于模拟雨雾环
境,覆盖测试距 离
试
信号损失
尺寸保证高
高速精确控制靶
高速动态
多传感
高速运动靶标
不宜过小
速下可稳定
标运动轨迹
目标测试
器
(旋转/移动)
追踪,处理
(>100km/h 相对
运动模糊
速度)


