RK3568 驱动开发
RK3568 驱动开发指南
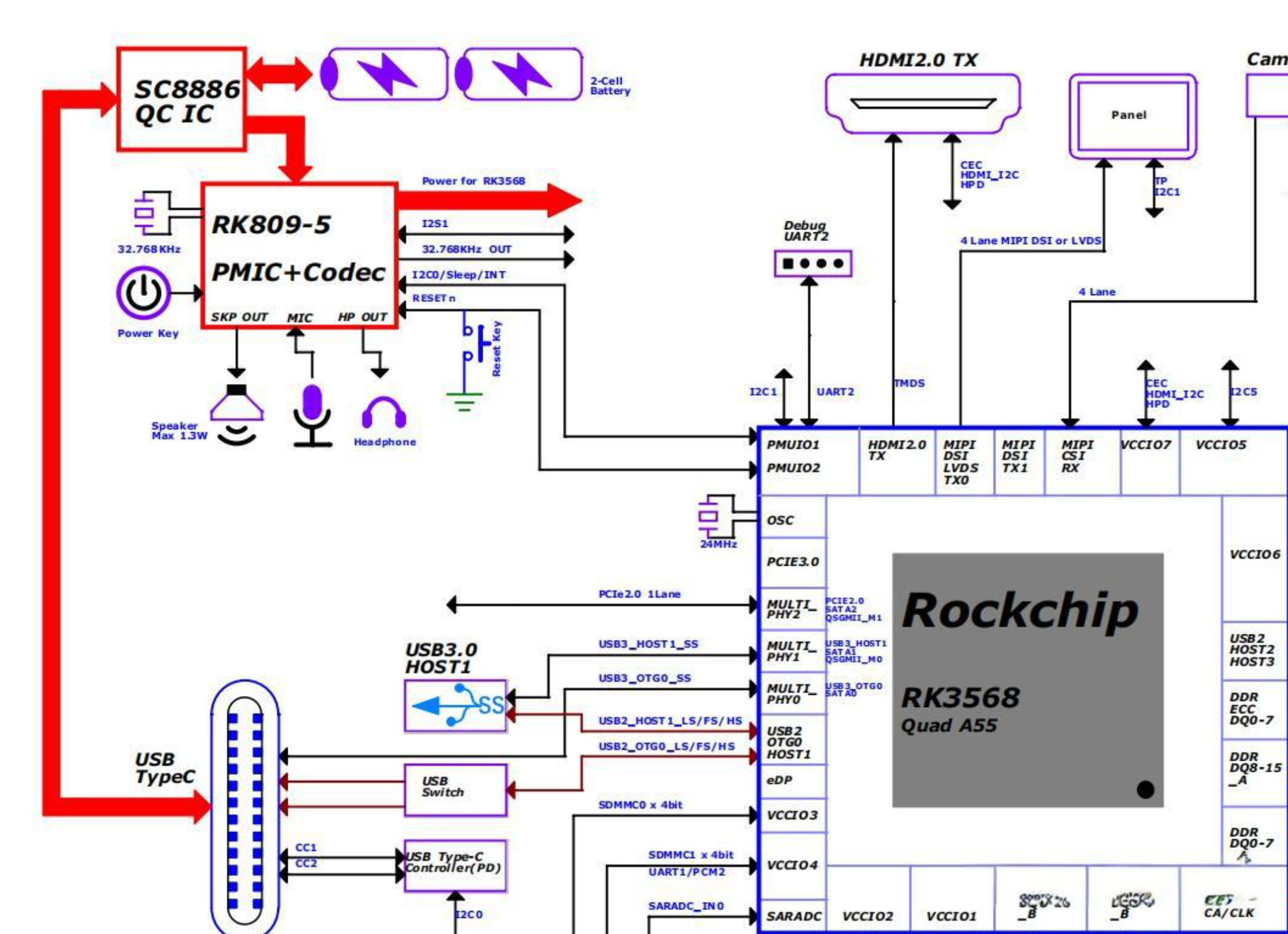
硬件平台概述
RK3568是瑞芯微(Rockchip)在2021年推出的一款主流中高端处理器芯片,采用先进的22nm工艺制程。其CPU采用四核ARM Cortex-A55架构设计,主频最高可达2GHz,并支持动态频率调节技术以平衡性能和功耗。
在图形处理方面,该芯片集成ARM Mali-G52 2EE GPU,支持OpenGL ES 1.1/2.0/3.2、OpenCL 2.0和Vulkan 1.1等图形API,能够流畅处理1080p分辨率下的图形渲染任务。同时,芯片内置0.8TOPS算力的NPU神经网络处理器,支持INT8/INT16混合量化计算,为AI应用提供高效的推理加速。
在接口扩展方面,RK3568提供丰富的外设接口:
- 支持双通道32bit LPDDR4/LPDDR4X内存控制器
- 配备PCIe 2.1、USB 3.0、千兆以太网等高速接口
- 支持4K@60fps H.265/H.264视频编解码
- 提供MIPI CSI/DSI、HDMI 2.0等显示接口
典型应用场景包括:
- 智能NVR设备:利用其强大视频处理能力和AI算力实现智能视频分析
- 人脸识别终端:通过NPU加速人脸检测和特征提取算法
- 工业控制设备:凭借高可靠性和丰富接口满足工业自动化需求
- 边缘计算网关:在本地完成数据采集和初步AI分析
- 商用显示设备:支持多屏异显和4K视频输出
该芯片凭借其均衡的性能表现和出色的性价比,在多个行业领域得到了广泛应用。
开发环境搭建
-
交叉编译工具链:建议使用官方提供的pre-built工具链
wget https://releases.linaro.org/components/toolchain/binaries/7.5-2019.12/aarch64-linux-gnu/gcc-linaro-7.5.0-2019.12-x86_64_aarch64-linux-gnu.tar.xztar -xvf gcc-linaro-7.5.0-2019.12-x86_64_aarch64-linux-gnu.tar.xzexport PATH=$PATH:/path/to/toolchain/bin -
内核源码获取:
git clone https://github.com/rockchip-linux/kernel.git -b develop-4.19 -
编译配置:
make ARCH=arm64 rockchip_linux_defconfigmake ARCH=arm64 menuconfig
驱动开发要点
1. 设备树配置
RK3568采用设备树(Device Tree)机制管理硬件资源,典型设备树节点配置示例:
&i2c1 { status = \"okay\"; clock-frequency = ; sensor@20 { compatible = \"vendor,sensor-model\"; reg = ; interrupt-parent = ; interrupts = ; };};2. 常见外设驱动开发
GPIO驱动
#include struct gpio_desc *gpio;gpio = devm_gpiod_get(&pdev->dev, \"enable\", GPIOD_OUT_LOW);gpiod_set_value(gpio, 1);I2C驱动
static struct i2c_driver sensor_driver = { .driver = { .name = \"sensor-driver\", .of_match_table = sensor_of_match, }, .probe = sensor_probe, .remove = sensor_remove, .id_table = sensor_id,};3. 中断处理
irq = gpiod_to_irq(gpio);ret = request_irq(irq, sensor_isr, IRQF_TRIGGER_RISING, \"sensor\", priv);调试技巧
- 内核打印:使用
dev_dbg()/dev_info()替代printk - 动态调试:
echo -n \'file driver.c +p\' > /sys/kernel/debug/dynamic_debug/control - 性能分析:
perf stat -a sleep 10perf record -g -a sleep 5
驱动加载与测试
-
模块编译:
obj-m := my_driver.oKERNELDIR := /path/to/kernel -
加载测试:
insmod my_driver.kodmesg | tail -
用户空间测试:
echo 1 > /sys/class/misc/mydevice/enablecat /proc/mydevice/status
常见问题解决
时钟配置问题
检查CRU(Clock and Reset Unit)相关寄存器
- 确认时钟源选择是否正确(如外部晶振或内部RC振荡器)
- 检查各时钟分频器配置是否合理(如PLL倍频参数)
- 验证时钟使能位状态(部分外设时钟需单独开启)
- 典型故障示例:UART波特率异常时,应检查APB总线时钟与波特率分频寄存器
DMA传输失败
确保CMA区域已正确配置
- 检查内核启动参数是否包含
cma=分配参数(如cma=64M) - 验证DMA缓冲区是否来自CMA区域(可通过
dma_alloc_coherent申请) - 常见错误:使用普通内存做DMA导致传输失败,需注意内存是否缓存对齐
- 调试方法:通过
cat /proc/meminfo | grep Cma查看CMA使用情况
电源管理
注意各电源域的唤醒顺序
- 需遵循:Always-On域 → 核心电源域 → 外设电源域的唤醒序列
- 典型错误场景:先开启外设电源会导致I2C/SPI设备无响应
- 建议操作流程:
- 配置唤醒源中断
- 设置电源域控制寄存器
- 等待PWR_OK状态位就绪
- 解除外设复位
性能优化建议
使用DMA进行大数据传输
- 适用场景:超过1KB的数据搬运(如视频帧传输)
- 配置步骤:
- 初始化DMA控制器
- 设置源/目标地址寄存器
- 配置传输长度和突发模式
- 启动传输并等待完成中断
- 优势:相比CPU搬运可降低30%以上CPU占用率
合理使用中断而非轮询
- 中断响应延迟应控制在<100us
- 推荐场景:
- 按键检测(GPIO中断)
- 数据到达(UART接收中断)
- 定时事件(TIMER中断)
- 注意事项:避免在中断服务程序中执行耗时操作
对高频操作路径进行优化
- 关键路径优化方法:
- 使用
perf工具定位热点函数 - 将循环展开(Loop Unrolling)
- 替换除法为移位操作
- 启用编译器优化(-O2/-O3)
- 使用
- 典型案例:图像处理算法中YUV转RGB的SIMD优化
利用硬件加速单元
如Crypto引擎的使用
- 支持算法:AES-256/SHA-2/RSA2048
- 典型配置流程:
// 初始化加密上下文struct crypto_aead *tfm = crypto_alloc_aead(\"gcm(aes)\", 0, 0);// 设置密钥crypto_aead_setkey(tfm, key, KEY_SIZE);// 执行加密crypto_aead_encrypt(tfm, dst, src, len); - 性能对比:软件实现AES需500cycles/byte,硬件加速仅需20cycles/byte


