PnP(Perspective-n-Point)算法 | 用于求解已知n个3D点及其对应2D投影点的相机位姿_pnp算法
什么是PnP算法?
- PnP 全称是 Perspective-n-Point,中文叫“n点透视问题”。
- 它的目标是:
已知一些空间中已知3D点的位置(世界坐标)和它们对应的2D图像像素坐标,求解摄像机的姿态(位置和平移)和朝向(旋转)。
简单来说,就是通过3D点和它们在照片上的投影点,算出相机“站在哪儿”和“看向哪儿”。
PnP解决的问题
你有一堆现实世界的点(比如3D模型上的标志点),也知道这些点在照片里的像素位置,PnP就是帮你找出“相机相对于这些点的位置和角度”。
PnP算法的原理(简单版)
-
已知条件:
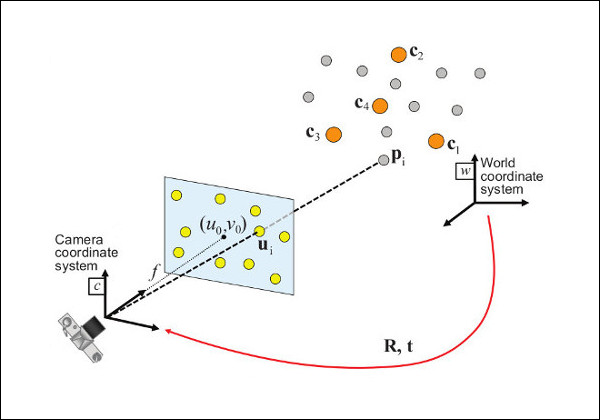
- nnn 个已知3D点 Pi=(Xi,Yi,Zi)P_i = (X_i, Y_i, Z_i)Pi=(Xi,Yi,Zi),在世界坐标系里。
- 它们对应的2D像素点 pi=(ui,vi)p_i = (u_i, v_i)pi=(ui,vi),在图像中。
-
目标:
- 找到相机的旋转矩阵 RRR 和平移向量 ttt,使得所有3D点经过变换后投影到图像上的位置,尽可能接近对应的2D点。
-
数学关系:
s[uivi1]=K×(R×Pi+t)s \\begin{bmatrix} u_i \\\\ v_i \\\\ 1 \\end{bmatrix} = K \\times \\big( R \\times P_i + t \\big)suivi1=K×(R×Pi+t)
其中:
- KKK 是相机内参矩阵,已知。
- R,tR, tR,t 是未知(我们要解的)。
- sss 是尺度因子(用于齐次坐标)。
-
求解过程:
- 利用多组点的对应关系,建立方程组。
- 通过最小化投影误差(图像点和投影点的距离),用优化算法求出最佳的 RRR 和 ttt。
你可以这样理解:
- PnP就像“反向投影”:你知道点在现实和照片的位置,求相机的位置和朝向。
额外说明:
- 如果点的数量较少(最少4个点),算法能工作,但更多点通常能得到更稳定准确的结果。
- 经典的PnP算法有很多变体,比如EPnP、UPnP、RPnP等,都旨在更快或更鲁棒地求解。
值得注意的是PnP的前提:对应关系必须先确定
-
**PnP算法本身不负责找到哪些3D点对应哪些2D点,**它的输入是:
- 一组3D点(已知位置)
- 它们在图像中的对应2D点
-
所以,在用PnP之前,必须先解决“匹配”问题:
怎样找到图像中哪个像素点对应哪个3D世界点?
对应关系的获得途径举例:
-
人工标定/标记:
在物体或场景上贴标记点,知道标记点的3D坐标,手动或者半自动找到图像中的对应点。 -
特征匹配:
利用特征点检测(如SIFT、ORB)在图像中提取关键点,并用描述子匹配它们与3D点(如用激光扫描得到的点云中提取特征点)。 -
结构光或投影仪:
通过主动投影图案产生已知对应关系。 -
深度相机(RGB-D)或激光雷达数据:
直接获得3D点和2D图像对齐。
没有对应关系,PnP算法就无从下手
所以在做定位、姿态估计、SLAM等任务时,建立稳定准确的“3D点 ↔ 2D点”对应关系是关键的第一步。

