动态规划 数字三角形
P1216 [IOI 1994] 数字三角形 Number Triangles - 洛谷
第一次有TLE。
#includeusing namespace std;int r;int dp(int c,int w,vector&a){if(c==r)return a[(c-1)*c/2+w-1];return a[(c-1)*c/2+w-1]+max(dp(c+1,w,a),dp(c+1,w+1,a));}signed main(){cin>>r;vectora(r*(r+1)/2);for(int i=0;i>a[i];cout<<dp(1,1,a);return 0;}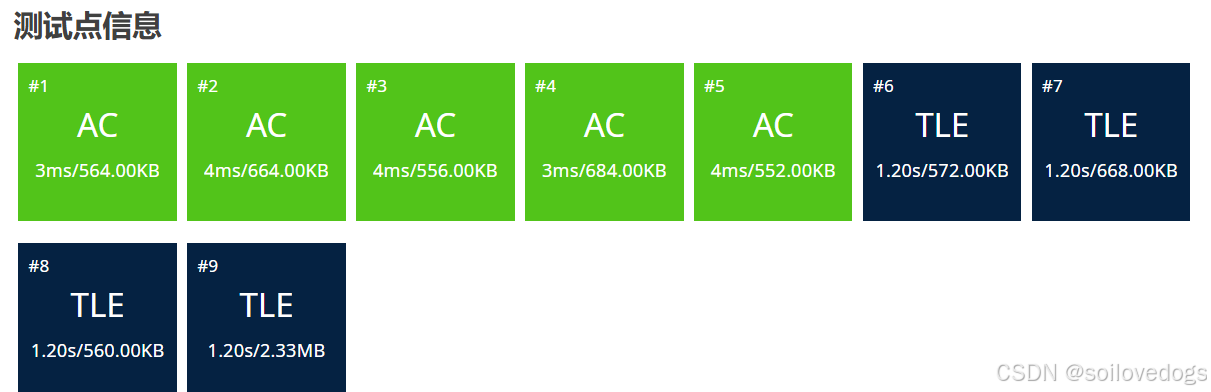
然后呢,作为小白,就向DeepSeek求助去了。
以下是它的反馈(我稍微整理了一下):
这段代码使用递归的方式计算了一个数字三角形(类似于杨辉三角的结构)从顶部到底部的最大路径和。虽然逻辑上是正确的,但它的时间复杂度非常高,导致在大输入时超时。
原因分析:
1. 递归的指数时间复杂度:当前的 dp 函数是一个纯递归实现,没有记忆化(Memoization),导致大量重复计算。比如,dp(c, w) 会被多次调用,每次都会重新计算,即使之前已经计算过相同参数的结果。
- 对于 r 层的三角形,递归调用的次数是 `O(2^r)`,因为每个点会分裂成两个子问题(左下和右下)。
- 当 `r` 较大时(比如 `r = 100`),`2^100` 是一个天文数字,必然超时。2. 输入规模:题目中 r 的范围可能很大(比如 `r = 100` 或更大),而递归解法无法处理这样的规模。
方法 1:记忆化搜索
在递归的基础上,用一个二维数组 `memo` 缓存已经计算过的 `dp(c, w)` 的结果,避免重复计算。通过缓存子问题的结果,将时间复杂度从指数级 (`O(2^r)`) 降低到多项式级 (`O(r^2)`)。#includeusing namespace std;int r;vector<vector> memo; // 记忆化表int dp(int c, int w, vector& a) {if (c == r) return a[(c-1)*c/2 + w-1];if (memo[c][w] != -1) return memo[c][w]; // 如果已经计算过,直接返回memo[c][w] = a[(c-1)*c/2 + w-1] + max(dp(c+1, w, a), dp(c+1, w+1, a)); // 缓存结果return memo[c][w];}signed main() {ios::sync_with_stdio(false);cin.tie(0); cout.tie(0);cin >> r;memo.assign(r + 1, vector(r + 1, -1)); // 初始化记忆化表vector a(r * (r + 1) / 2);for (int i = 0; i > a[i];cout << dp(1, 1, a);return 0;}方法 2:从底向上的动态规划
从三角形的底部开始,逐层向上计算每个点到最底层的最大路径和,最终 `dp[1][1]` 就是答案。直接按层计算,避免了递归的开销,更高效。#includeusing namespace std;int r;signed main() {ios::sync_with_stdio(false);cin.tie(0); cout.tie(0);cin>>r;vectora(r*(r+1)/2);for(int i=0;i>a[i];vector<vector>dp(r+1,vector(r+1,0));for(int i=r;i>=1;i--){for(int j=1;j<=i;j++){if(i==r)dp[i][j]=a[i*(i-1)/2+j-1];else dp[i][j]=a[i*(i-1)/2+j-1]+max(dp[i+1][j],dp[i+1][j+1]);}}cout<<dp[1][1];return 0;}


