my_DRL_sim:应用深度强化学习控制腿部机器人
本文还有配套的精品资源,点击获取 
简介:深度强化学习结合了深度学习和强化学习的优势,使得智能体能够通过与环境交互学习最优策略。本项目”my_DRL_sim”专注于利用深度强化学习技术控制腿部机器人的运动,使用Python编程语言和深度学习框架如TensorFlow或PyTorch。项目包含了环境模拟、状态表示、动作空间设计、奖励函数设定、深度学习模型选择与训练、模型评估与测试,以及可视化工具的实现,旨在使机器人学会自主有效地行走。
1. 深度强化学习(DRL)概述
1.1 深度强化学习的发展背景
深度强化学习(Deep Reinforcement Learning,DRL)是近年来人工智能领域中非常热门的研究方向之一。它将深度学习(Deep Learning)与强化学习(Reinforcement Learning,RL)相结合,利用深度神经网络的强大特征提取能力,解决了传统强化学习在高维观测数据处理上的难题。DRL的应用范围广泛,从游戏到自动驾驶,再到机器人控制等地方均有显著成果。
1.2 深度强化学习的基本原理
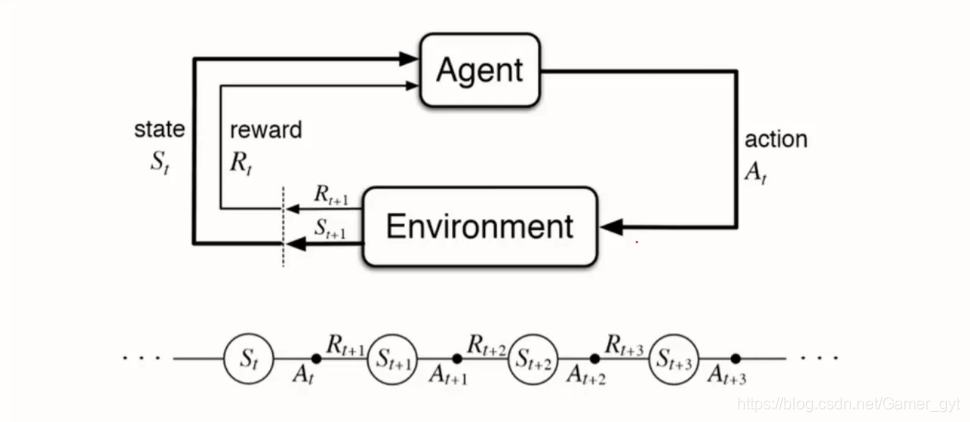
DRL的核心原理在于代理(Agent)通过与环境(Environment)交互,通过试错的方式学习到如何在特定的状态下采取行动以最大化累积奖励(Cumulative Reward)。在每次交互过程中,代理会接收环境的观测信息,并根据当前的策略(Policy)输出一个动作(Action),环境则根据代理的动作给出相应的反馈和新的观测状态。
1.3 深度强化学习的关键技术挑战
尽管DRL在众多领域取得了成功,但实际应用中仍面临诸多技术挑战,如探索与利用(Exploration vs. Exploitation)的平衡、奖励设计的复杂性、样本效率低以及对高维输入数据处理的挑战等。此外,算法的稳定性和可扩展性也是当前研究的热点问题,如何在保持模型泛化能力的同时,提高训练过程的稳定性和效率是推动DRL领域发展的关键。
2. 腿部机器人运动控制
2.1 腿部机器人的运动学原理
2.1.1 运动学基础与模型构建
在机器人领域中,运动学研究的是机械结构在不考虑力和质量影响的情况下如何运动。对于腿部机器人而言,理解运动学原理是实现有效运动控制的关键。运动学模型通常分为正运动学和逆运动学两部分。
正运动学主要关心的是给定机器人各关节的角度(或位移),计算机器人末端执行器(本例中即腿部的脚)的位置和姿态。而逆运动学则相反,它解决的问题是给定末端执行器的期望位置和姿态,求解出各个关节应该处于的角度(或位移)。
构建运动学模型涉及多个步骤,首先需要定义机器人各个连杆和关节的几何关系,然后利用齐次变换矩阵表达这些关系。例如,对于一个简单的二维平面机器人,可以使用旋转矩阵和位移矩阵来表达各个关节间的关系,最终构成整个机器人的运动学方程。
import numpy as npdef forward_kinematics(thetas): \"\"\" 正运动学函数:根据关节角度计算机器人末端位置和姿态。 参数: - thetas: 关节角度数组。 返回: - pose: 末端位置和姿态。 \"\"\" # 初始化姿态和位置 pose = np.zeros((3, 1)) # 这里是根据连杆参数和关节角度,通过矩阵运算计算末端位置和姿态 # ... return pose# 示例使用thetas = np.array([np.pi/4, np.pi/3, np.pi/6])末端执行器姿态 = forward_kinematics(thetas)2.1.2 逆运动学问题及其求解方法
逆运动学问题的求解相对复杂,尤其是在多自由度的机器人中。基本的方法包括解析法、数值法和优化算法。
解析法试图通过代数方式直接求解出关节角度。然而,在复杂机器人模型中,这种直接求解可能变得非常困难或不可行。数值法,例如牛顿-拉夫森迭代法,通常需要一个合理的初始猜测,并通过迭代逼近真实的解。优化算法则通过最小化某种误差指标,利用梯度下降等方法求解。
def inverse_kinematics(pose, initial_thetas): \"\"\" 逆运动学函数:根据末端位置和姿态计算关节角度。 参数: - pose: 末端位置和姿态。 - initial_thetas: 初始关节角度。 返回: - thetas: 求得的关节角度。 \"\"\" # 使用数值法或优化算法迭代求解 # ... return thetas# 示例使用末端执行器姿态 = np.array([目标x位置, 目标y位置, 目标姿态])初始关节角度 = np.array([初始角度1, 初始角度2, 初始角度3])关节角度 = inverse_kinematics(末端执行器姿态, initial_thetas)2.2 腿部机器人的动力学分析
2.2.1 动力学方程的建立
动力学分析涉及力和加速度对机器人运动的影响。腿部机器人行走时,不仅需要控制位置,还要保证步伐的稳定和能量的高效利用。动力学模型可以帮助我们理解在给定力和扭矩作用下机器人各部件的加速度和运动情况。
根据牛顿第二定律,力等于质量乘以加速度。在机器人模型中,可以应用牛顿-欧拉方程或拉格朗日方程来建立动力学方程。牛顿-欧拉法通常从末端执行器开始,逐个计算每个连杆上的力和扭矩。而拉格朗日法则是基于能量守恒,适用于复杂系统的动力学分析。
flowchart TDA[牛顿第二定律] --> B[牛顿-欧拉法]A --> C[拉格朗日法]B --> D[从末端执行器开始计算]C --> E[基于能量守恒计算]2.2.2 动态平衡与稳定性分析
动态平衡是指机器人在行走或操作过程中,各连杆加速度与外力、扭矩达到平衡的状态。稳定性分析则是确定机器人是否能够在受到外部扰动时,保持或恢复其平衡状态。
要对腿部机器人的动态平衡和稳定性进行分析,一般需要建立模型,进行仿真测试,并通过调整模型参数来优化平衡控制策略。这可能包括加入足端力反馈控制,或使用预设的平衡策略(例如ZMP——Zero Moment Point)来分析和预测机器人的稳定状态。
flowchart LRA[动力学模型建立] --> B[仿真测试]B --> C[稳定性分析]C --> D[平衡控制策略优化]在实践中,这意味着通过计算机仿真来模拟机器人在不同条件下的行为,从而能够调整其运动控制策略。例如,当机器人倾斜时,需要迅速调整关节角度以维持平衡,这就需要通过仿真来发现合适的控制逻辑和参数。
# 假设我们有某种仿真环境和稳定控制函数def adjust_leg_angles_for_balance(current_angles, environment_data): \"\"\" 根据环境数据调整腿部关节角度以维持平衡。 参数: - current_angles: 当前关节角度。 - environment_data: 环境数据(包括加速度、力等)。 返回: - adjusted_angles: 调整后的关节角度。 \"\"\" # 基于环境数据和稳定性分析调整角度 # ... return adjusted_angles# 示例使用当前关节角度 = np.array([当前角度1, 当前角度2, 当前角度3])环境数据 = 获取环境数据()调整后的关节角度 = adjust_leg_angles_for_balance(当前关节角度, 环境数据)通过上述章节的深入分析,我们不仅理解了腿部机器人运动控制的基础理论,还探讨了实际应用中的关键问题和解决方案。这为后续章节中讨论的环境模拟、动作空间定义、奖励函数设定以及深度学习模型的选择与训练过程,都提供了坚实的理论基础。
3. Python编程语言和深度学习框架的应用
3.1 Python在DRL中的作用
3.1.1 Python编程语言的优势
Python作为一种高级编程语言,在DRL(深度强化学习)领域中的应用广泛,这归功于其多方面的优势。首先,Python拥有丰富的库和框架,使得开发者可以方便地进行科学计算和数据处理。例如,NumPy和Pandas为数据处理提供了强大的支持,而matplotlib和seaborn等库则使得数据可视化变得简单直观。
其次,Python的语法简洁,易于上手,这吸引了大量的研究人员和工程师参与到DRL的研究与开发工作中。此外,Python的动态类型和自动内存管理减轻了开发者的负担,使得他们能够更加专注于算法本身而非繁琐的底层细节。
Python也具有良好的跨平台特性,可以在多种操作系统上无缝运行,这为DRL算法的部署和测试提供了极大的便利。最后,Python社区活跃,技术更新迅速,使得Python能够紧跟最新的科技发展潮流,这对于新兴领域如DRL来说至关重要。
3.1.2 Python在机器学习领域的应用实例
在机器学习和DRL领域,Python的应用实例比比皆是。以TensorFlow和PyTorch这两个深度学习框架为例,它们都提供了强大的Python接口,使得开发复杂的神经网络模型变得轻松。例如,使用PyTorch可以快速构建复杂的神经网络结构,并利用其自动求导机制(autograd)来计算梯度并更新网络参数。
另一个典型的应用是使用Python实现强化学习算法。在实现诸如Q-learning、Deep Q-Network (DQN)或者更高级的策略梯度方法时,Python能够通过简洁的代码实现复杂的逻辑和数学运算,大大加快了原型开发和迭代的速度。
在实践中,研究人员可能需要探索不同的算法变体,或者调整参数来优化模型表现。Python的快速开发和调试特性,结合Jupyter Notebook这样的交互式编程环境,使得研究人员可以即时地观察算法运行结果,做出调整并立即看到效果。
3.2 深度学习框架的选择与使用
3.2.1 深度学习框架概述
深度学习框架是为了简化深度学习模型的构建、训练和部署而开发的一套软件库。这些框架提供了自动化的梯度计算、高效的数值运算以及灵活的网络构建工具,极大地降低了深度学习应用的门槛。
当前流行的深度学习框架包括但不限于TensorFlow、PyTorch、Keras等。TensorFlow由Google开发,以其良好的生产环境部署和分布式训练支持而闻名;PyTorch由Facebook开发,以其动态计算图和易用性受到研究社区的喜爱;Keras则因其简洁的API和快速原型开发能力受到初学者的欢迎。
选择合适的框架需要根据项目需求、开发者的熟悉程度和社区支持等因素综合考虑。通常来说,研究阶段更倾向于使用PyTorch,因为它允许开发者更自由地实验和调整模型;而在将模型部署到生产环境时,可能会选择TensorFlow,因为它提供了更为完善的工具链和生态系统。
3.2.2 TensorFlow与PyTorch框架对比
TensorFlow和PyTorch是当前最受欢迎的两个深度学习框架,二者各有千秋,对比如下:
- 编程范式 :TensorFlow采用静态图,模型在构建阶段就定义好了完整的计算流程,而PyTorch采用动态图,可以在运行时即时构建计算图。这种差异使得PyTorch在调试和研究阶段更受青睐,而TensorFlow在优化和部署时更为高效。
- 易用性与灵活性 :PyTorch提供了更为直观的接口,初学者可以快速上手。它还支持即时的梯度计算,非常适合研究和实验。TensorFlow则需要更多的学习和设置,但是一旦掌握,它可以提供更强的灵活性和优化能力。
- 社区与生态系统 :TensorFlow由于早期的推广和Google的支持,拥有广泛的用户基础和成熟的生态系统,包括丰富的预训练模型和工具。PyTorch虽然起步较晚,但凭借其易于使用的特性,也吸引了大量的用户和贡献者,社区发展迅速。
- 生产部署 :TensorFlow在模型部署方面有着更多的工具和经验,尤其是对于Android和iOS平台的支持较为成熟。PyTorch通过TorchScript和TorchServe等工具也正在快速提升其在生产环境中的表现。
在实际选择框架时,需要根据项目具体要求和团队的技术栈来决定。例如,如果项目需要快速迭代和模型原型开发,那么可能会倾向于使用PyTorch;如果是大型生产级别的项目,则TensorFlow可能更加合适。
# 示例代码:使用PyTorch构建一个简单的神经网络模型import torchimport torch.nn as nnimport torch.optim as optimclass SimpleNet(nn.Module): def __init__(self): super(SimpleNet, self).__init__() self.fc = nn.Linear(784, 10) # 示例:将28x28的图像展平后分类 def forward(self, x): x = x.view(-1, 784) # 展平图像数据 return self.fc(x)# 实例化网络模型model = SimpleNet()criterion = nn.CrossEntropyLoss() # 定义损失函数optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9) # 定义优化器# 训练网络模型的伪代码for epoch in range(num_epochs): for data in train_loader: # train_loader是训练数据的迭代器 inputs, targets = data optimizer.zero_grad() # 梯度清零 outputs = model(inputs) # 前向传播 loss = criterion(outputs, targets) # 计算损失 loss.backward() # 反向传播 optimizer.step() # 更新参数在此代码块中,我们创建了一个简单的全连接神经网络用于分类任务,并通过标准的梯度下降优化过程训练网络。代码的逻辑分析包括实例化模型、定义损失函数和优化器、进行数据迭代训练等步骤。通过这个例子,我们可以看到PyTorch在实现深度学习模型方面的简洁和直观性。
4. 环境模拟和状态表示设计
4.1 环境模拟的重要性
4.1.1 为什么要进行环境模拟
在深度强化学习(DRL)中,环境模拟是一个关键环节。环境模拟允许我们创建一个虚拟的实验空间,用于训练和测试智能体。这种模拟环境的好处在于:
- 安全性 :在虚拟环境中进行试验,可以避免真实世界中因训练而可能产生的物理损害或风险。
- 可控性 :可以精确控制环境参数,快速复现实验条件,便于重复实验和结果对比。
- 可扩展性 :创建环境模拟的成本远远低于在真实世界中构建同样复杂场景的成本。
- 快速迭代 :通过模拟环境可以加快学习速度,快速获得训练数据,并及时调整和优化算法。
4.1.2 常用的环境模拟方法
环境模拟的方法多种多样,常见的包括:
- 物理引擎模拟 :使用软件如Gazebo或MuJoCo等来模拟真实的物理世界,适用于机器人和各种动态系统。
- 游戏引擎模拟 :借助Unity、Unreal Engine等游戏引擎,可以创建复杂、逼真的环境。
- 自定义模拟器 :对于特定问题,研究人员可以自己编写模拟器,以完全控制实验条件。
为了更好地理解如何创建模拟环境,我们考虑一个简单的例子:
假设我们需要训练一个智能体在虚拟环境中学习驾驶一辆汽车。在这种情况下,我们可能会选择使用一个物理引擎模拟器,如Gazebo,它提供了详细的物理模型,可以模拟汽车的动力学特性、轮胎与地面的摩擦等等。
4.2 状态表示的设计原则
4.2.1 状态空间的定义和选择
在强化学习中,状态空间指的是智能体在每个时刻能够观测到的所有可能状态的集合。设计一个好的状态空间至关重要,它需要:
- 全面性 :能够准确描述环境的关键信息。
- 可操作性 :状态应该是智能体可以理解和操作的。
- 最小化冗余 :避免不必要的信息,减少状态空间的大小。
4.2.2 状态的观察与编码
状态的观察是指智能体通过传感器收集环境信息的过程。状态的编码则是将收集到的信息转化为智能体能够理解的格式,常见的编码方法包括:
- 向量编码 :将状态信息编码为一个多维向量,每维代表不同的状态特征。
- 图像编码 :在视觉强化学习任务中,可以将观察图像直接用作状态表示。
- 符号编码 :使用一组符号来表示环境状态,适用于离散或符号化的环境。
例如,在设计一个机器人导航任务的状态表示时,可以将机器人的位置、周围障碍物的位置、目标点的距离和方向编码为一个高维状态向量。此状态向量对于决策算法来说,包含了足够的信息来作出合理的移动决策。
接下来,我们将深入探讨如何通过环境模拟来创建一个训练平台,并探讨一些有效的状态编码技术。
5. 动作空间定义与奖励函数设定
在深度强化学习(DRL)中,动作空间和奖励函数是构成学习环境的两个关键元素,它们直接影响到智能体的学习过程和最终性能。本章节将深入探讨动作空间的定义及其优化策略,以及奖励函数的设计方法及其调整与优化。
5.1 动作空间的设计
5.1.1 动作空间的概念与分类
动作空间是指智能体在学习过程中可以选择的所有动作的集合。在DRL中,动作空间通常可以分为离散空间和连续空间。
- 离散动作空间 是由有限个离散动作组成的集合,例如游戏中向左、向右移动等。每个动作都是明确且互斥的。
- 连续动作空间 则是由连续的数值组成的无限集合,例如机器人手臂的位置和速度控制。在连续动作空间中,智能体需要学习的是如何产生适合的控制信号。
5.1.2 动作空间的限制与优化策略
在定义动作空间时,必须考虑实际应用的限制以及环境的物理特性。过度复杂或过大的动作空间会增加学习的难度和计算成本,而过于简单的动作空间则可能限制智能体的性能。因此,合理地设计动作空间至关重要。
优化策略 包括:
- 动作空间的剪枝 :通过分析问题的物理限制和环境特性,去除不可能或不合理的动作,减少搜索空间。
- 动作空间的抽象 :在连续动作空间中,可以通过定义一些离散的宏动作来简化控制逻辑。
- 动作空间的降维 :采用主成分分析(PCA)等方法,将动作空间降至较低维度以简化问题。
import numpy as npdef reduce_action_space(action_space): \"\"\" 降维动作空间的示例代码 :param action_space: 高维动作空间 :return: 降维后的动作空间 \"\"\" # 示例:使用PCA进行降维 from sklearn.decomposition import PCA pca = PCA(n_components=2) low_dim_space = pca.fit_transform(action_space) return low_dim_space5.2 奖励函数的设定
5.2.1 奖励函数的作用与设计方法
奖励函数是强化学习中最重要的部分之一。它为智能体的行为提供了反馈,指导其学习目标。良好的奖励函数设计能够使智能体更快地学习并达到最优策略。
- 即时奖励 :在每个时间步给智能体提供的奖励。
- 延迟奖励 :从长期的角度考虑,对一段时期内行为的总体评估。
设计奖励函数时,应遵循以下原则:
- 简洁性 :奖励函数应尽可能简洁,避免复杂的内部逻辑。
- 相关性 :奖励应该与任务目标直接相关。
- 稀疏性与密集性 :根据任务的性质决定使用稀疏奖励(仅在关键事件发生时提供奖励)或密集奖励(频繁提供奖励以指导学习)。
5.2.2 奖励函数的调整与优化
在实践中,奖励函数往往需要经过多次试验和调整才能达到理想的效果。优化奖励函数的方法包括:
- 奖励缩放 :根据问题的难度调整奖励的幅度。
- 奖励分解 :将复杂的奖励函数分解为多个子奖励函数,分别控制不同方面的行为。
- 惩罚与奖励的结合 :使用惩罚来阻止智能体采取负面行为。
def optimize_reward(reward_function): \"\"\" 优化奖励函数的示例代码 :param reward_function: 初始奖励函数 :return: 优化后的奖励函数 \"\"\" # 示例:增加奖励缩放和惩罚项 def optimized_reward(state, action): reward = reward_function(state, action) if some_condition(state, action): reward += penalty_term # 引入惩罚项 return scale * reward # 奖励缩放 return optimized_reward在设计和调整奖励函数时,通常需要多次试错和模拟运行,以便找到最佳的奖励方案。奖励函数的调整直接影响智能体的学习过程和最终性能,因此,细致地分析和优化奖励函数对整个DRL项目的成功至关重要。
6. 深度学习模型选择与训练过程
在深度强化学习(DRL)的实现过程中,深度学习模型的选择和训练过程是核心步骤之一,它们直接影响到算法的性能和收敛速度。本章节将详细介绍如何在DRL项目中选择合适的深度学习模型,以及在训练过程中应遵循的策略和步骤。
6.1 深度学习模型的选择
在DRL中,我们通常需要处理高维度的输入数据,并学习复杂的策略和值函数。因此,选择合适的深度学习模型至关重要。
6.1.1 不同模型的适用场景
在DRL任务中,根据不同的需求,常见的深度学习模型包括全连接网络(FCN)、卷积神经网络(CNN)、循环神经网络(RNN)以及最近兴起的图神经网络(GNN)等。
- 全连接网络 :适用于输入数据维度固定且不需要考虑空间特征的情况。
- 卷积神经网络 :在图像识别、处理具有网格状拓扑结构的数据(如视频帧序列)时表现优异。
- 循环神经网络 :擅长处理序列数据,如自然语言处理或时间序列预测。
- 图神经网络 :处理图结构数据,适合网络拓扑结构中的节点和边信息表示。
6.1.2 模型选择的依据与方法
选择合适的模型时,需要综合考虑以下几个因素:
- 问题特性 :首先分析DRL任务的特性,例如输入数据的类型、状态空间和动作空间的大小等。
- 经验与实验 :参考类似任务的成功案例和实验结果,通过小规模的实验测试不同模型的性能。
- 资源限制 :考虑可用的计算资源,选择能够高效训练的模型架构。
6.2 模型训练的策略与过程
模型训练是DRL算法实现中最耗时的环节之一,有效的训练策略和过程监控可以帮助提升训练效率和模型质量。
6.2.1 训练数据的准备与预处理
训练数据的准备和预处理步骤对模型的性能影响很大。
- 数据收集 :根据DRL任务的特点,收集训练所需的数据集,例如模拟器产生的数据。
- 数据清洗 :去除噪声和异常值,保证数据质量。
- 数据增强 :对数据进行必要的变换,如翻转图像、添加噪声等,以增强模型的泛化能力。
6.2.2 训练过程的监控与调整
训练过程的监控与调整是确保模型稳定学习的关键。
- 损失函数监控 :实时监控损失函数的值,确保模型在正确的方向上学习。
- 性能评估 :定期使用验证集评估模型性能,避免过拟合。
- 超参数调整 :根据模型训练表现调整学习率、批大小等超参数。
为了直观理解训练过程,这里提供一个模型训练的伪代码示例:
# 模型训练伪代码model = build_model() # 构建模型结构optimizer = set_optimizer(model) # 设置优化器for epoch in range(total_epochs): # 遍历所有训练周期 losses = [] for batch in data_loader: # 遍历所有批次数据 # 前向传播 predictions = model(batch[\'input\']) loss = compute_loss(predictions, batch[\'output\']) losses.append(loss.item()) # 反向传播和优化 optimizer.zero_grad() loss.backward() optimizer.step() # 打印平均损失,监控训练过程 print(f\'Epoch {epoch}: Average Loss {sum(losses)/len(losses)}\') # 验证模型性能 validate(model)训练过程的可视化也是必不可少的,我们可以使用TensorBoard等工具来可视化损失函数的变化、模型的性能指标等。
通过以上细致入微的介绍和操作步骤,第六章不仅为读者提供了一个明确的模型选择和训练框架,也为具体操作提供了详细的指导。在接下来的章节中,我们将继续探讨如何评估和测试训练好的模型,以及如何利用可视化工具来优化和展示我们的研究成果。
本文还有配套的精品资源,点击获取
简介:深度强化学习结合了深度学习和强化学习的优势,使得智能体能够通过与环境交互学习最优策略。本项目”my_DRL_sim”专注于利用深度强化学习技术控制腿部机器人的运动,使用Python编程语言和深度学习框架如TensorFlow或PyTorch。项目包含了环境模拟、状态表示、动作空间设计、奖励函数设定、深度学习模型选择与训练、模型评估与测试,以及可视化工具的实现,旨在使机器人学会自主有效地行走。
本文还有配套的精品资源,点击获取


