【DR_CAN-最优控制笔记】04.动态规划_简单的一维案例_动态规划 drcan
目录
文章目录
- 目录
- 系统描述
-
- 控制策略1
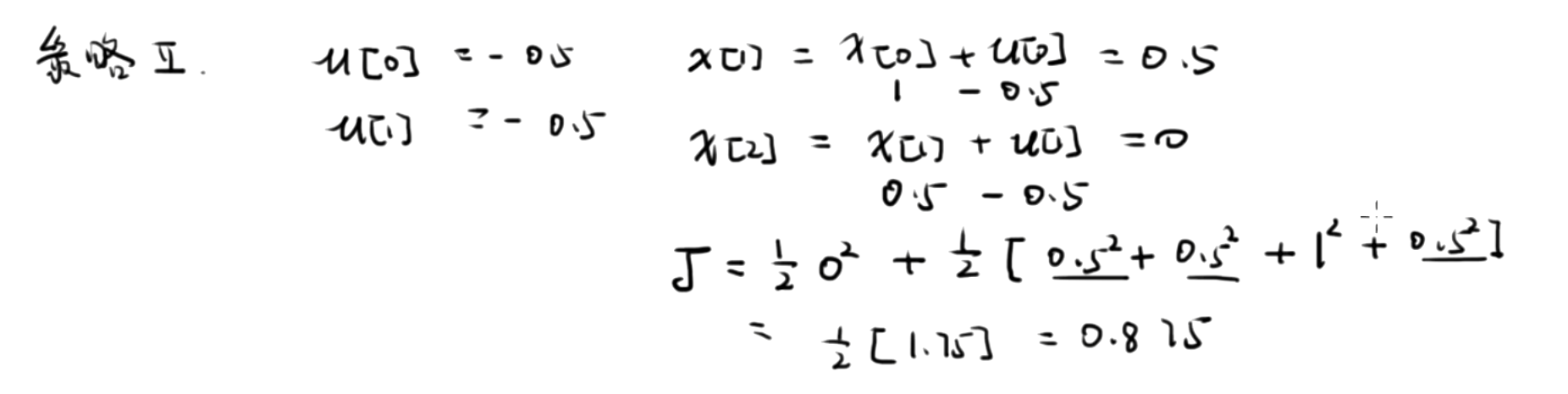
- 控制策略2
- 两种策略比较
- 解析的方法求最优控制策略
- 最优控制策略的具体推导过程
-
- 1.分析 J 1 − 2 J_{1-2} J1−2
- 2.分析 J 0 − 2 J_{0-2} J0−2
- 3.计算最优代价
之前的内容,讨论了动态规划的数值方法求解最优解的过程,这次讨论一个简单的解析方法的例子。
系统描述
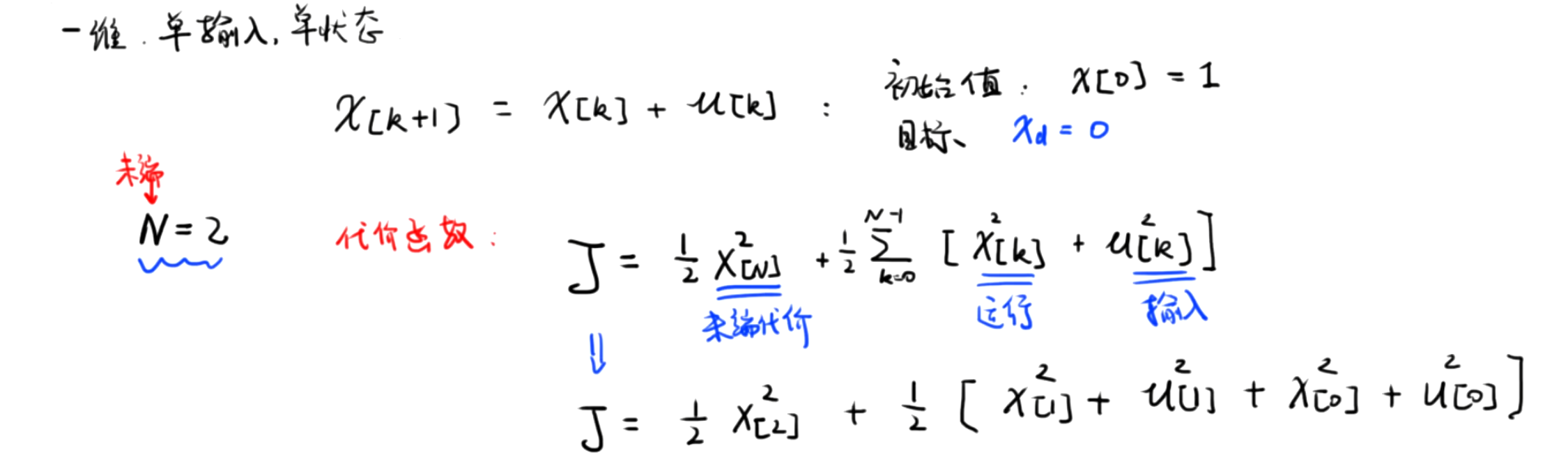
1.为什么 N=2 N=2 N=2 :在这个案例中, N N N 表示离散时间的步数, N=2 N=2 N=2 意味着我们考虑两步的控制过程,即 u[0] u[0] u[0] 和 u[1] u[1] u[1] 这两个控制输入,通过这两步输入来控制整个系统的状态。
2.代价函数的形式:代价函数通常包含末端状态代价,运行状态代价和输入状态代价。这是因为我们不仅关心系统最终达到的状态(末端状态代价),还关心系统在运行过程中的状态(运行状态代价)以及控制输入的大小(输入状态代价)。一个合理的代价函数可以综合考虑这些因素,以找到最优的控制策略。
控制策略1

控制策略2
两种策略比较
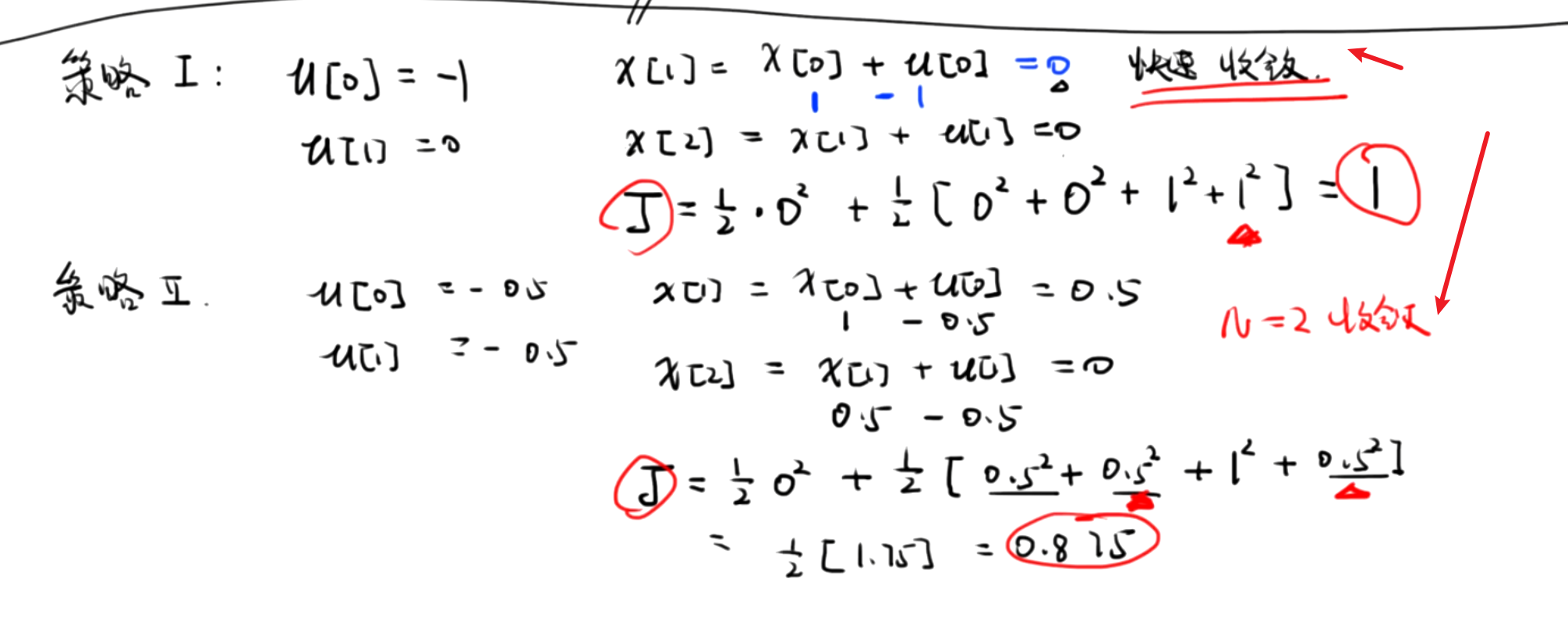
[!NOTE]
一个策略试快速收敛,一个策略是代价小
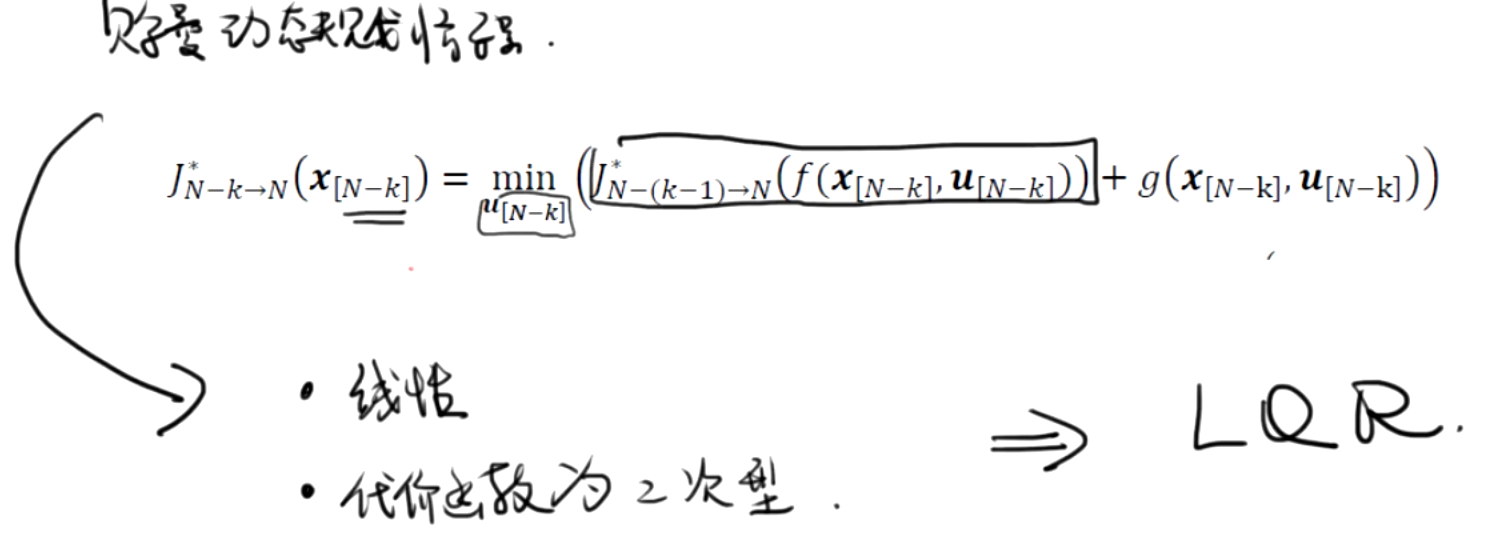
解析的方法求最优控制策略
[!NOTE]
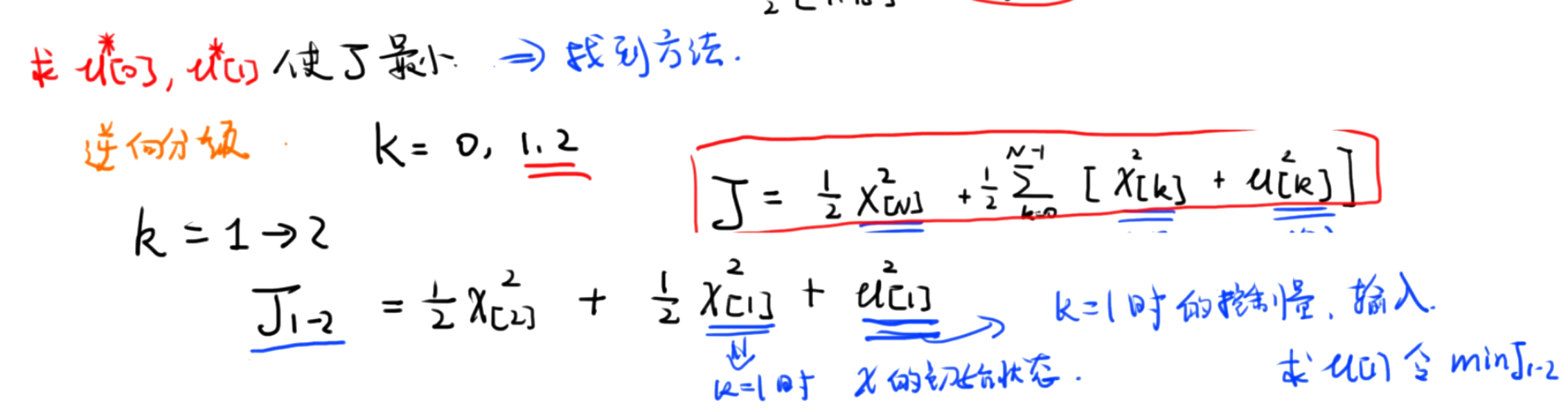
要找到最优控制量 u ∗ [ 0 ] , u ∗ [ 1 ] u^{*}[0],u^{*}[1] u∗[0],u∗[1] .来促使 J J J最小。前面讲解了贝尔曼方程和动态规划的原理,现在使用这些工具进行求解。
[!NOTE]
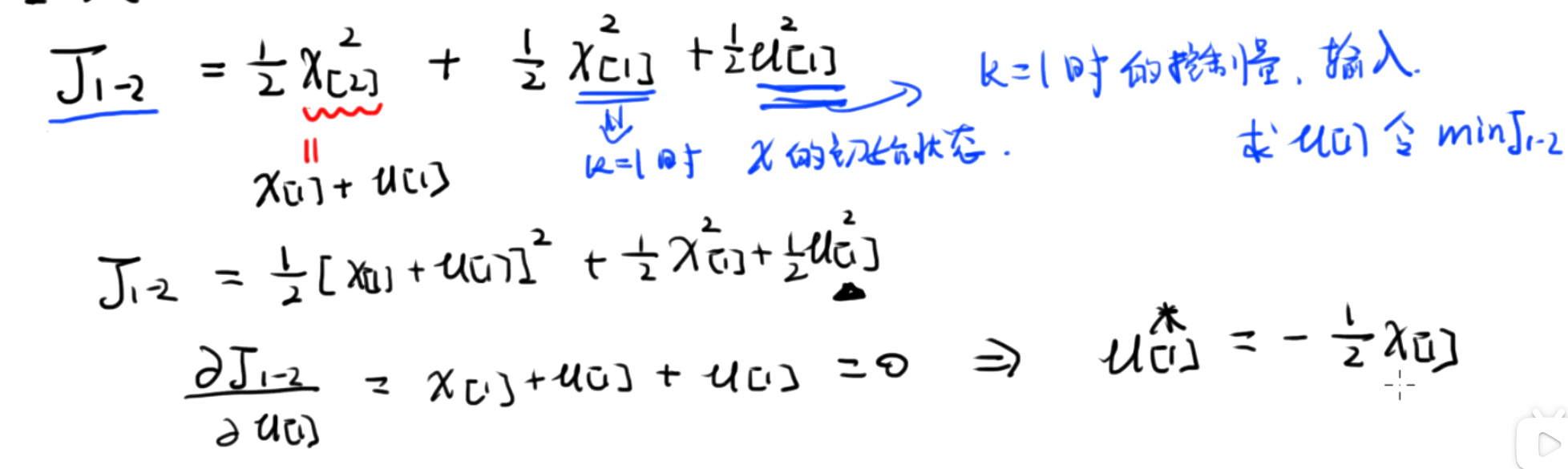
到这一步,可以看到 J 1 − 2 J_{1-2} J1−2是跟k=1时的控制输入强相关的。所以到这一步的话,现在的目标就变成了要找到最优的控制输入u[1],使得 m i n ( J 1 − 2) min(J_{1-2}) min(J1−2)
[!NOTE]
将x[2]用x[1]+u[1]替换下来,然后现在J是一个只跟u[1]和x[1]相关的函数,为了找到最小化的J,可以对u[1]求导,然后就能得到最优的u[1]。
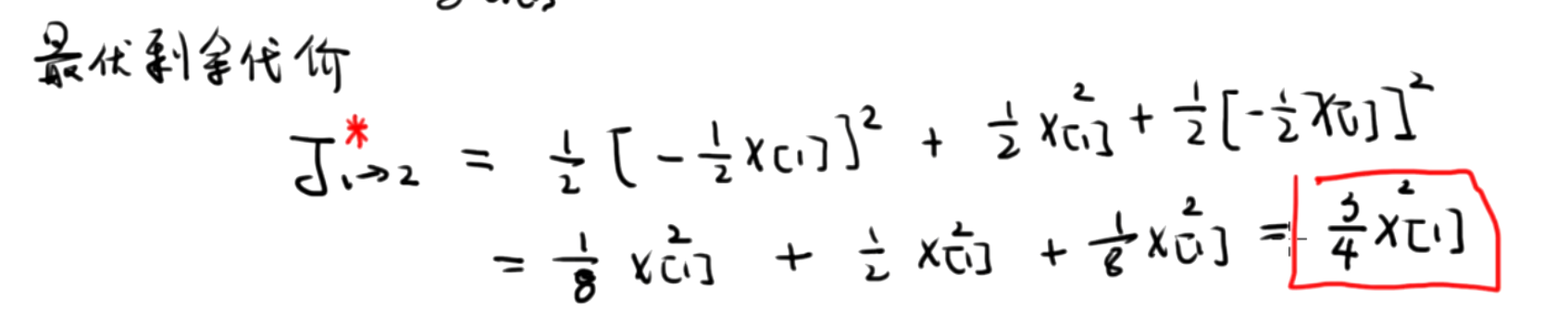
有了最优的控制输入u[1],就可以求得这一级的最优剩余代价。
然后分析 J 0 − 2 J_{0-2} J0−2.
[!NOTE]
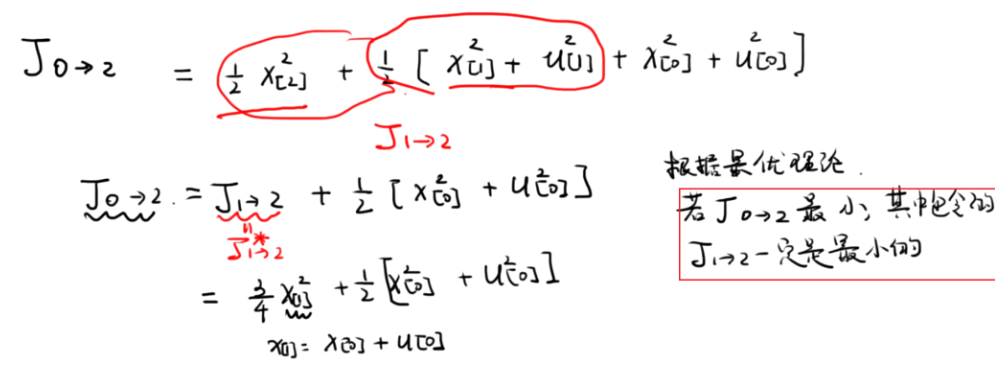
从 J 0 − 2 J_{0-2} J0−2的公式中,可以看出来,包含了一部分 J 1 − 2 J_{1-2} J1−2的内容,根据最优理论,此处 J 1 − 2 J_{1-2} J1−2也是最优的,所以使用 J 1 − 2 ∗ J^{*}_{1-2} J1−2∗ 来替代。
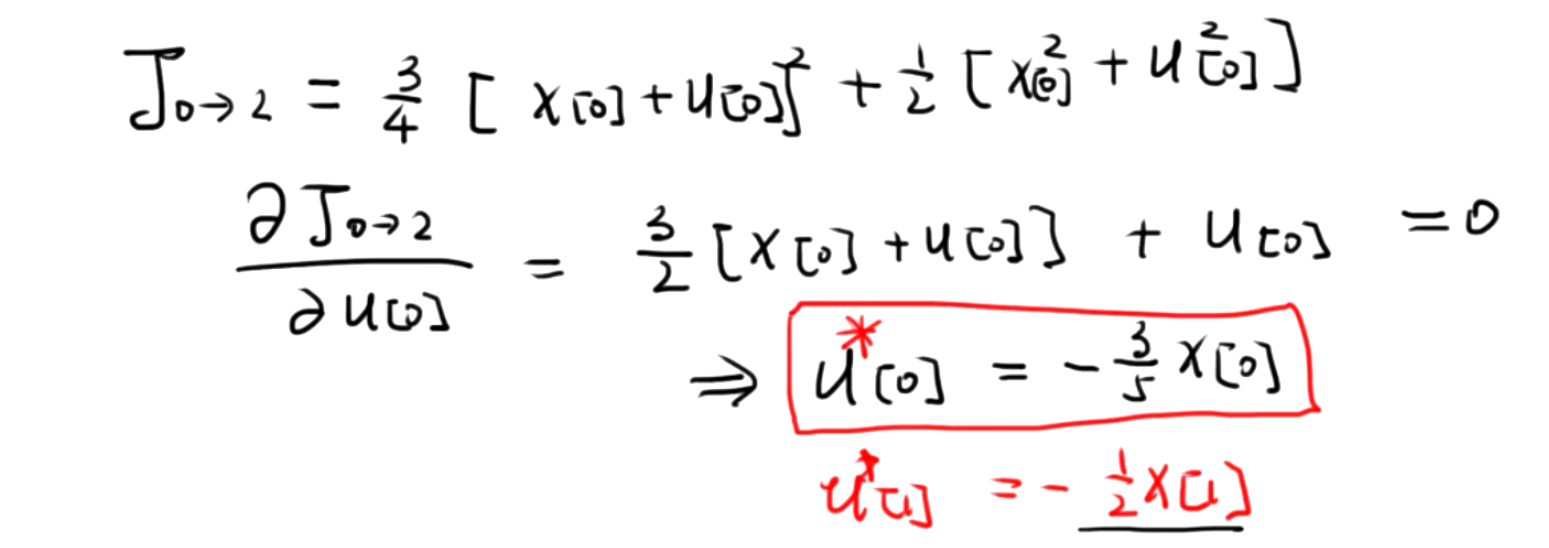
将x[1]替代后,可以看到 J 0 − 2 J_{0-2} J0−2的一部分已经是最优了,所以只需要另一部分最优即可,对u[0]求导之后,可以得到u[0]的最优量。
有了最优控制量和最优控制策略之后,可以带入相关的值进入J中。
最优控制策略的具体推导过程
1.分析 J 1 − 2 J_{1-2} J1−2
首先,我们关注 J 1 − 2 J_{1-2} J1−2 ,它与 k=1 k=1 k=1 时的控制输入 u[1] u[1] u[1] 强相关。我们的目标是找到最优的控制输入 u[1] u[1] u[1] ,使得 J 1 − 2 J_{1-2} J1−2 最小,即 min ( J 1 − 2) \\min \\left(J_{1-2}\\right) min(J1−2) 。
假设系统的状态转移方程为 x[k+1]=x[k]+u[k] x[k+1]=x[k]+u[k] x[k+1]=x[k]+u[k] ,那么 x[2]=x[1]+u[1] x[2]=x[1]+u[1] x[2]=x[1]+u[1] 。将 x[2] x[2] x[2] 用 x[1]+u[1] x[1]+u[1] x[1]+u[1] 替换到 J 1 − 2 J_{1-2} J1−2 的表达式中,此时 J 1 − 2 J_{1-2} J1−2 变成了一个只与 u[1] u[1] u[1] 和 x[1] x[1] x[1] 相关的函数,记为 J 1 − 2 (u[1],x[1]) J_{1-2}(u[1], x[1]) J1−2(u[1],x[1]) 。为了找到 J 1 − 2 J_{1-2} J1−2 的最小值,我们对 u[1] u[1] u[1] 求导,并令导数为 0 :
∂ J 1 − 2 ( u [ 1 ] , x [ 1 ] ) ∂ u [ 1 ]= 0 \\frac{\\partial J_{1-2}(u[1], x[1])}{\\partial u[1]}=0 ∂u[1]∂J1−2(u[1],x[1])=0
解这个方程,就可以得到最优的 u[1] u[1] u[1] ,记为 u ∗ [1] u^*[1] u∗[1] 。
有了最优的控制输入 u ∗ [1] u^*[1] u∗[1] ,我们就可以求得这一级的最优剩余代价 J 1 − 2 ∗ J_{1-2}^* J1−2∗ ,即 J 1 − 2 ∗ = J 1 − 2 ( u ∗ [ 1 ] , x [ 1 ] ) J_{1-2}^*=J_{1-2}\\left(u^*[1], x[1]\\right) J1−2∗=J1−2(u∗[1],x[1]) 。
2.分析 J 0 − 2 J_{0-2} J0−2
接下来,我们分析 J 0 − 2 J_{0-2} J0−2 。从 J 0 − 2 J_{0-2} J0−2 的公式中,可以看出它包含了一部分 J 1 − 2 J_{1-2} J1−2 的内容。根据最优性原理,在求解 J 0 − 2 J_{0-2} J0−2 的最优解时, J 1 − 2 J_{1-2} J1−2 也应该是最优的,所以我们使用 J 1 − 2 ∗ J_{1-2}^* J1−2∗ 来替代 J 1 − 2 J_{1-2} J1−2 。
同样,假设系统的状态转移方程为 x[1]=x[0]+u[0] x[1]=x[0]+u[0] x[1]=x[0]+u[0] ,将 x[1] x[1] x[1] 用 x[0]+u[0] x[0]+u[0] x[0]+u[0] 替换到 J 0 − 2 J_{0-2} J0−2 的表达式中,此时 J 0 − 2 J_{0-2} J0−2 变成了一个只与 u[0] u[0] u[0] 和 x[0] x[0] x[0] 相关的函数,记为 J 0 − 2 (u[0],x[0]) J_{0-2}(u[0], x[0]) J0−2(u[0],x[0]) 。
由于 J 0 − 2 J_{0-2} J0−2 的一部分(即 J 1 − 2 ∗ J_{1-2}^* J1−2∗ )已经是最优的,所以只需要让另一部分关于 u[0] u[0] u[0] 的部分最优即可。我们对 u[0] u[0] u[0] 求导,并令导数为 0 :
∂ J 0 − 2 ( u [ 0 ] , x [ 0 ] ) ∂ u [ 0 ]= 0 \\frac{\\partial J_{0-2}(u[0], x[0])}{\\partial u[0]}=0 ∂u[0]∂J0−2(u[0],x[0])=0
解这个方程,就可以得到最优的 u[0] u[0] u[0] ,记为 u ∗ [0] u^*[0] u∗[0] 。
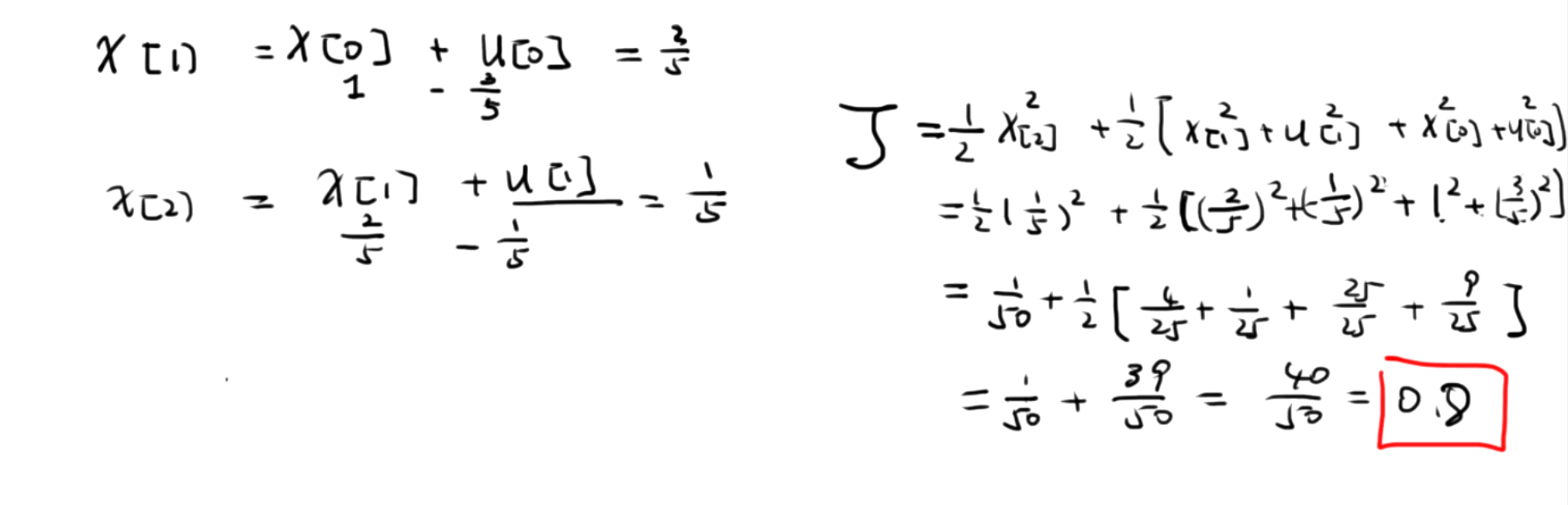
3.计算最优代价
有了最优控制量 u ∗ [0] u^*[0] u∗[0] 和 u ∗ [1] u^*[1] u∗[1] 以及最优控制策略之后,我们可以将相关的值代入 J J J 中,计算出最优代价 J ∗ J^* J∗ :
J ∗ = J ( u ∗ [ 0 ] , u ∗ [ 1 ] , x [ 0 ] ) J^*=J\\left(u^*[0], u^*[1], x[0]\\right) J∗=J(u∗[0],u∗[1],x[0])

