SLAM技术之FAST_LIO和FAST_LIO2算法复现_fastlio2
文章目录
- 前言
- FAST-LIO原理介绍
- 运行环境配置
- 运行测试
-
- 数据下载
- FAST_LIO算法运行测试
- FAST_LIO2算法运行测试
- 参考
前言
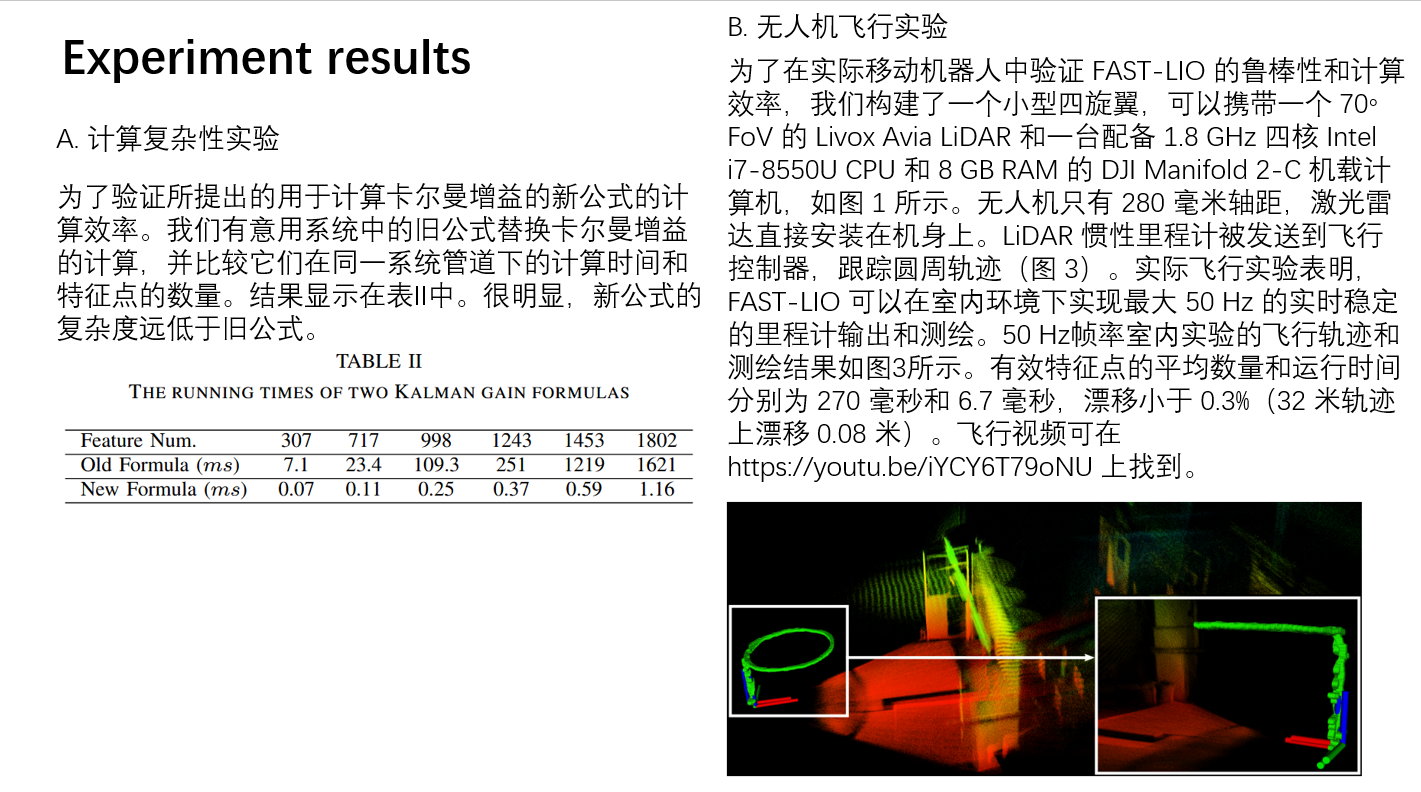
FAST_LIO提出了一个计算高效且稳健的 LiDAR 惯性里程计框架。使用紧密耦合的迭代扩展卡尔曼滤波器将 LiDAR 特征点与 IMU 数据融合,以便在发生退化的快速运动、嘈杂或杂乱的环境中实现稳健的导航。
FAST_LIO2提出了一个快速、强大且多功能的 LiDAR 惯性里程计框架。FASTLIO2 基于高效的紧密耦合迭代卡尔曼滤波器构建,具有两个关键的新颖性,可实现快速、稳健和准确的 LiDAR 导航(和映射)。
FAST-LIO2相对于FAST-LIO来说,改进的地方是:(1)去掉了特征提取模块,直接使用点云。(2)使用ikd-tree存储点云。
本文介绍了FAST_LIO原理,并搭建了FAST-LIO和FAST-LIO2的运行环境,方便学习FAST-LIO算法。
video:
- 【开源】SLAM技术之FAST_LIO和FAST_LIO2算法复现
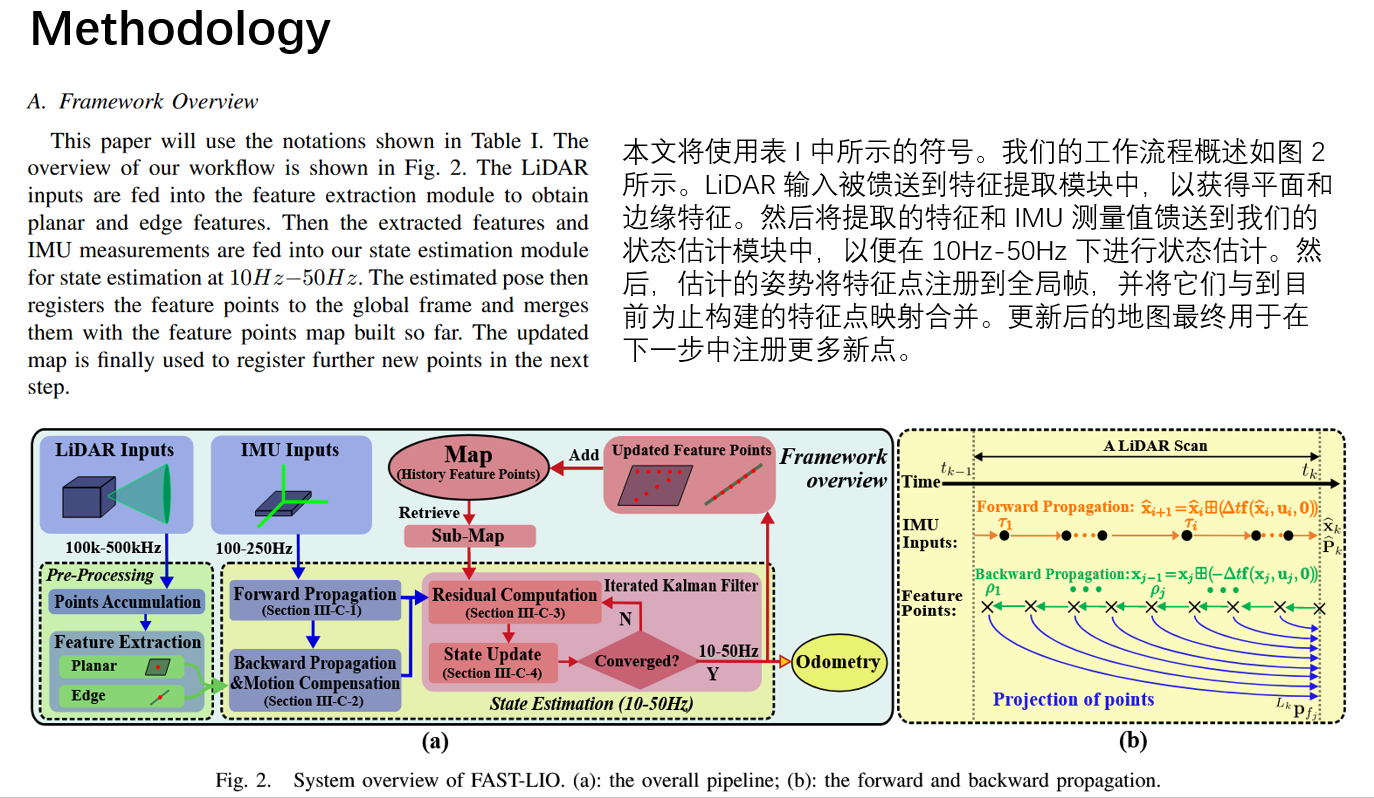
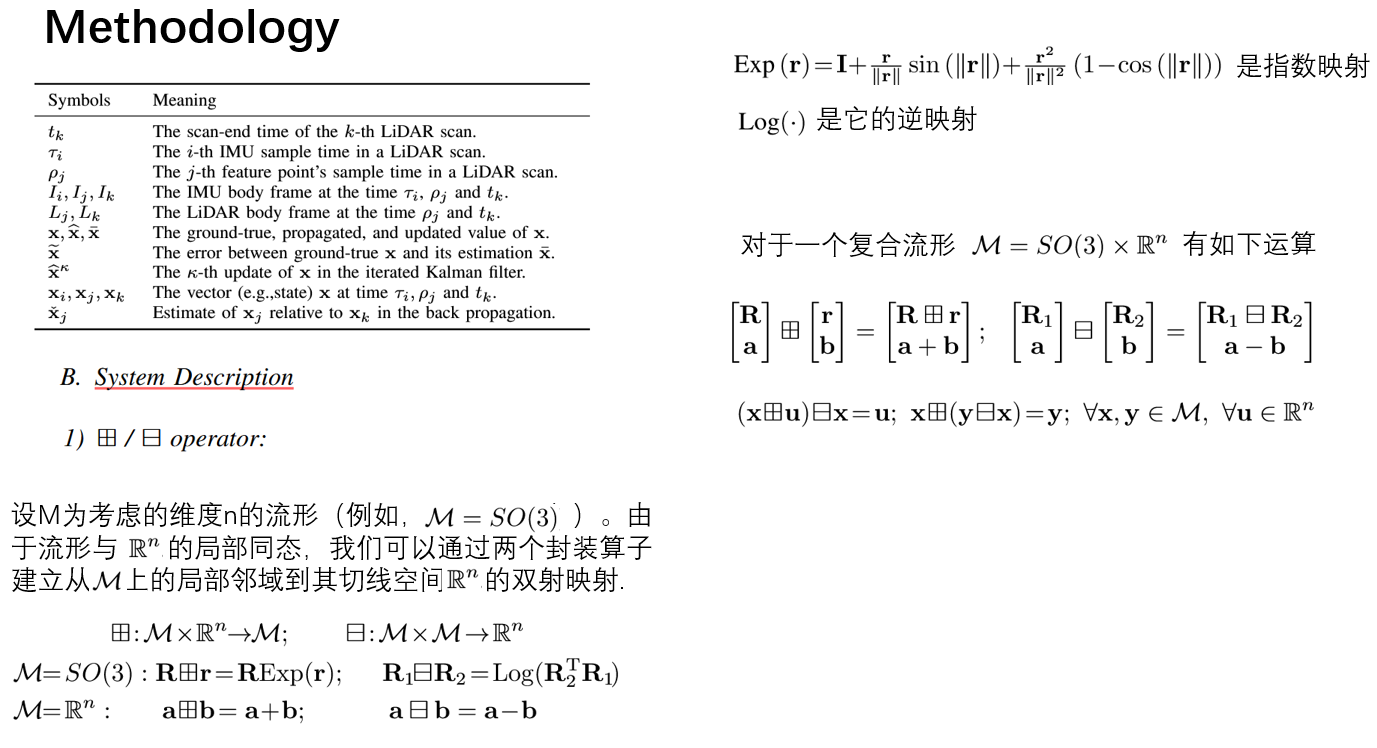
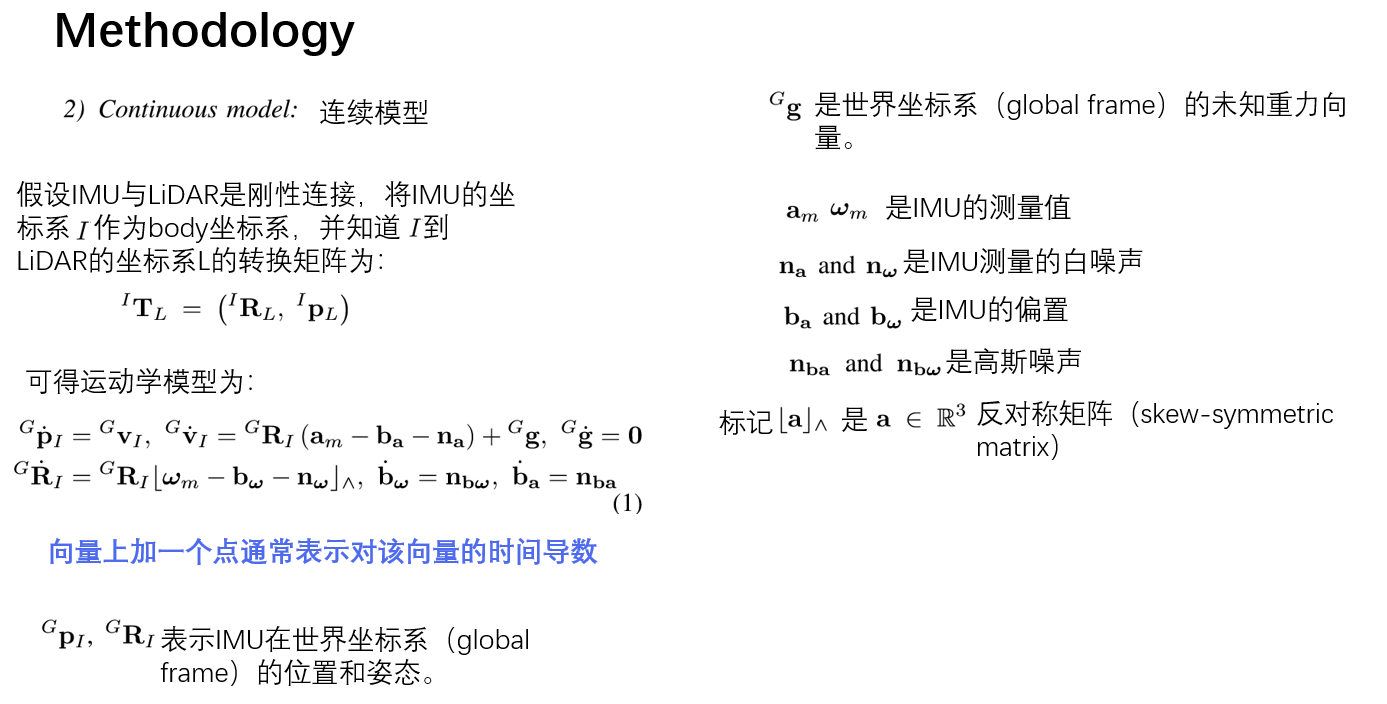
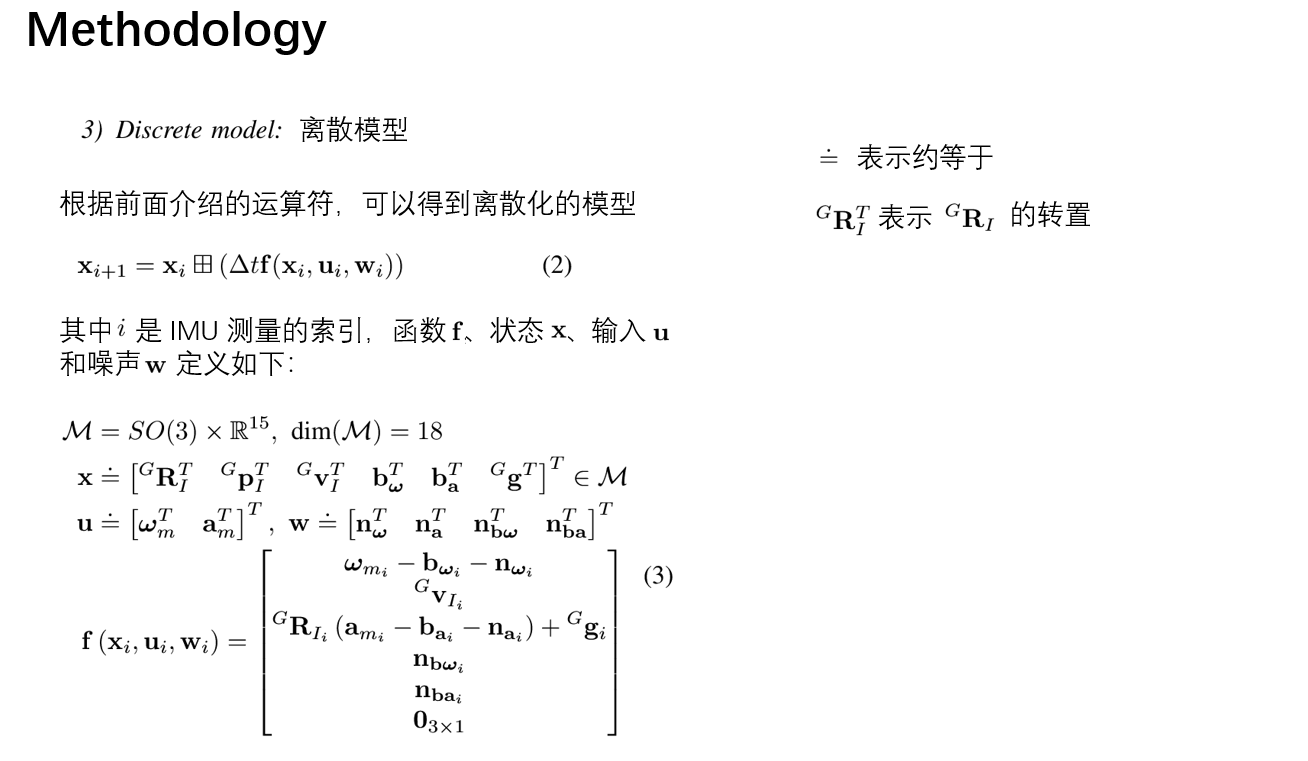
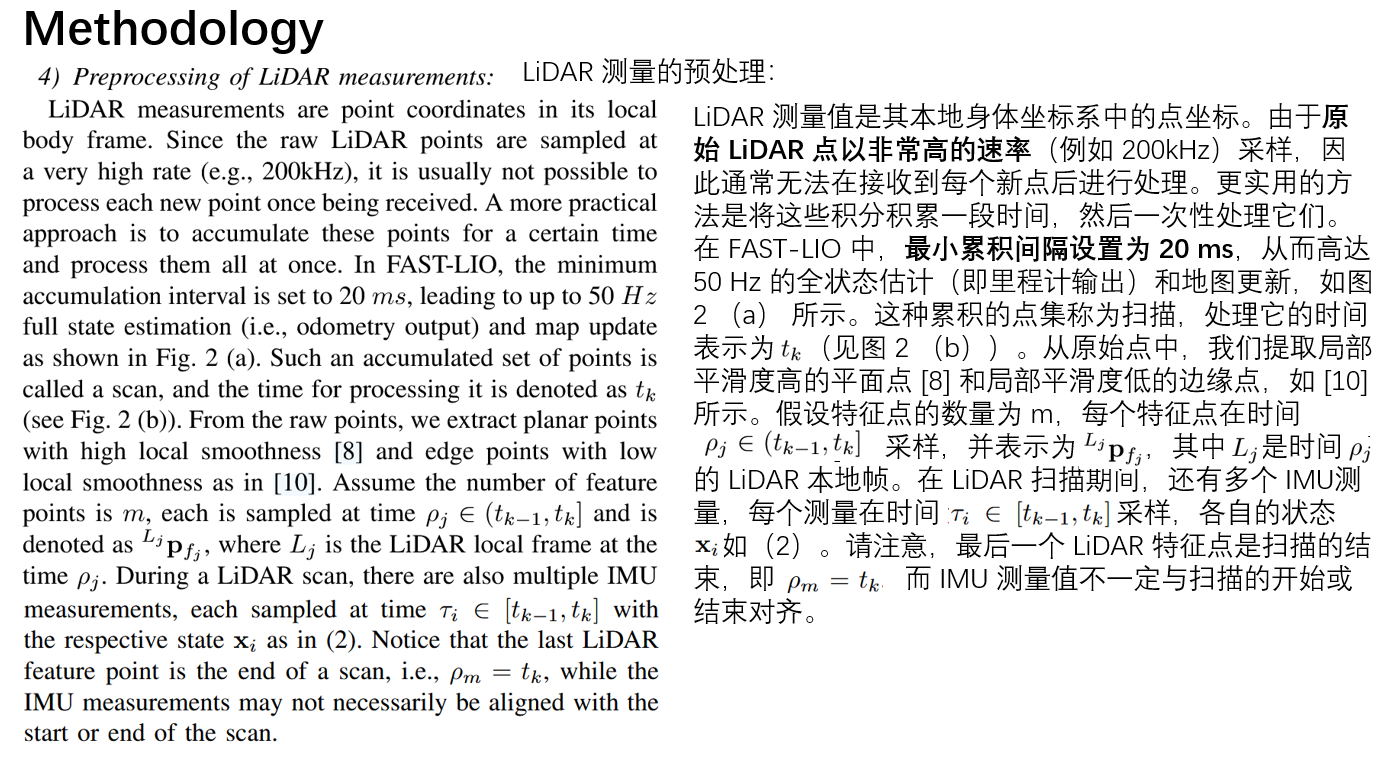
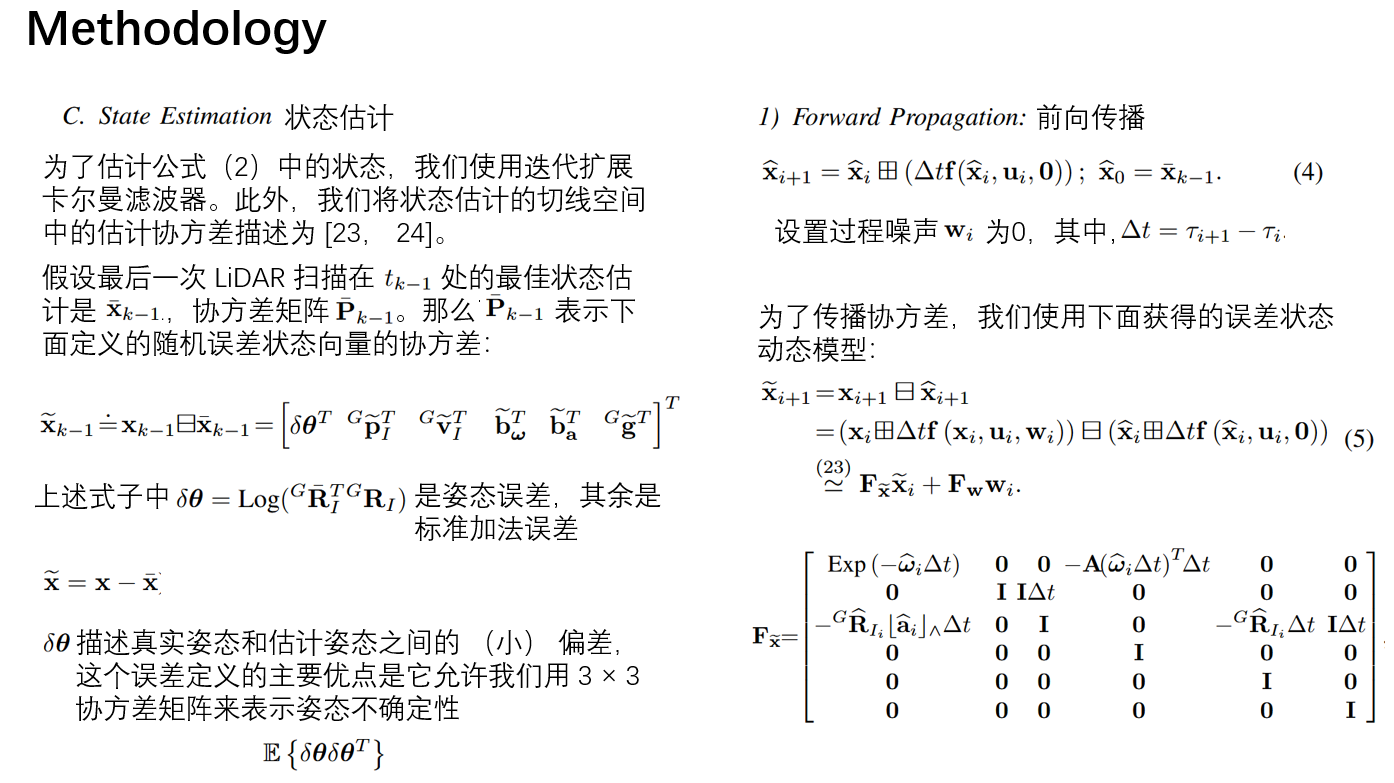
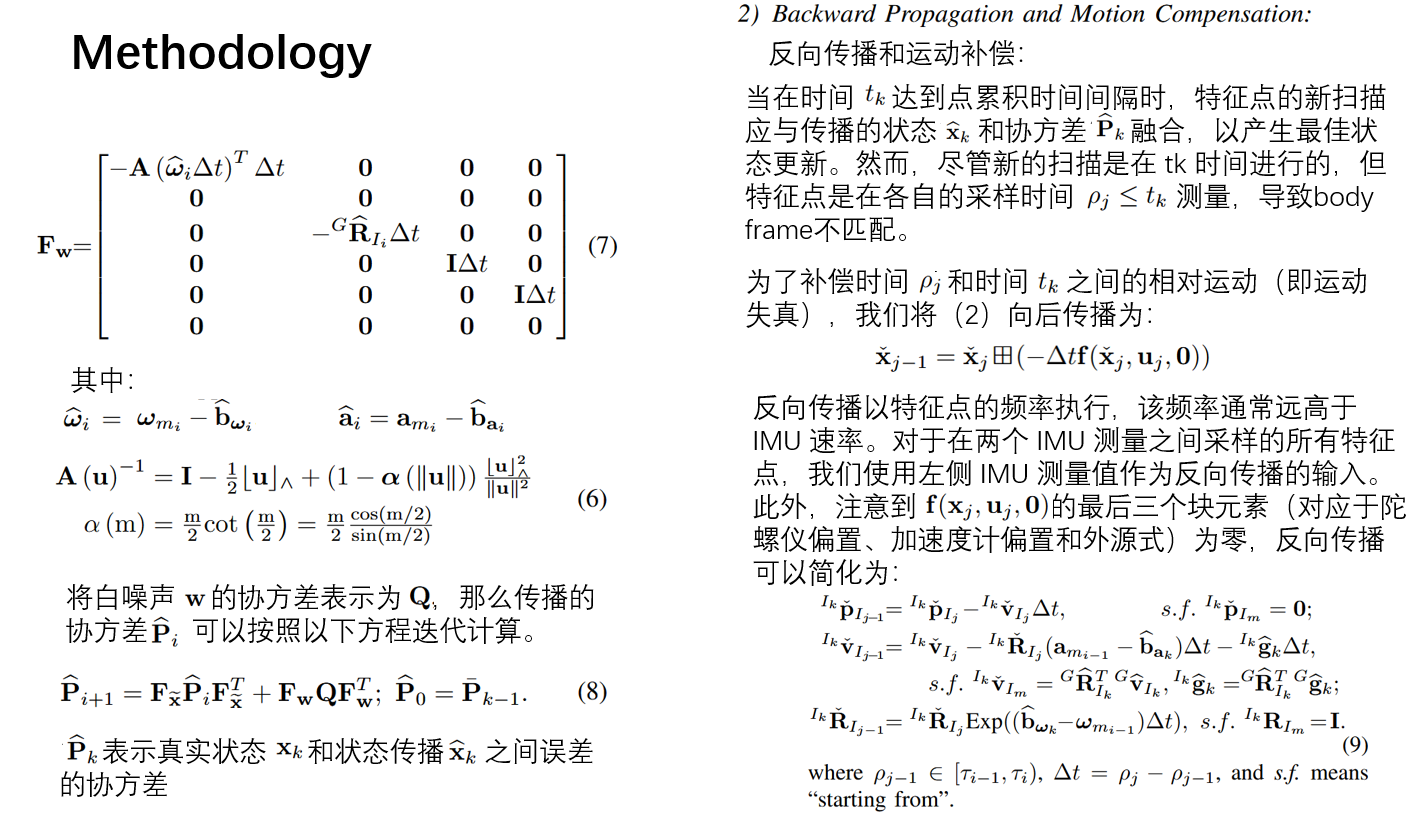
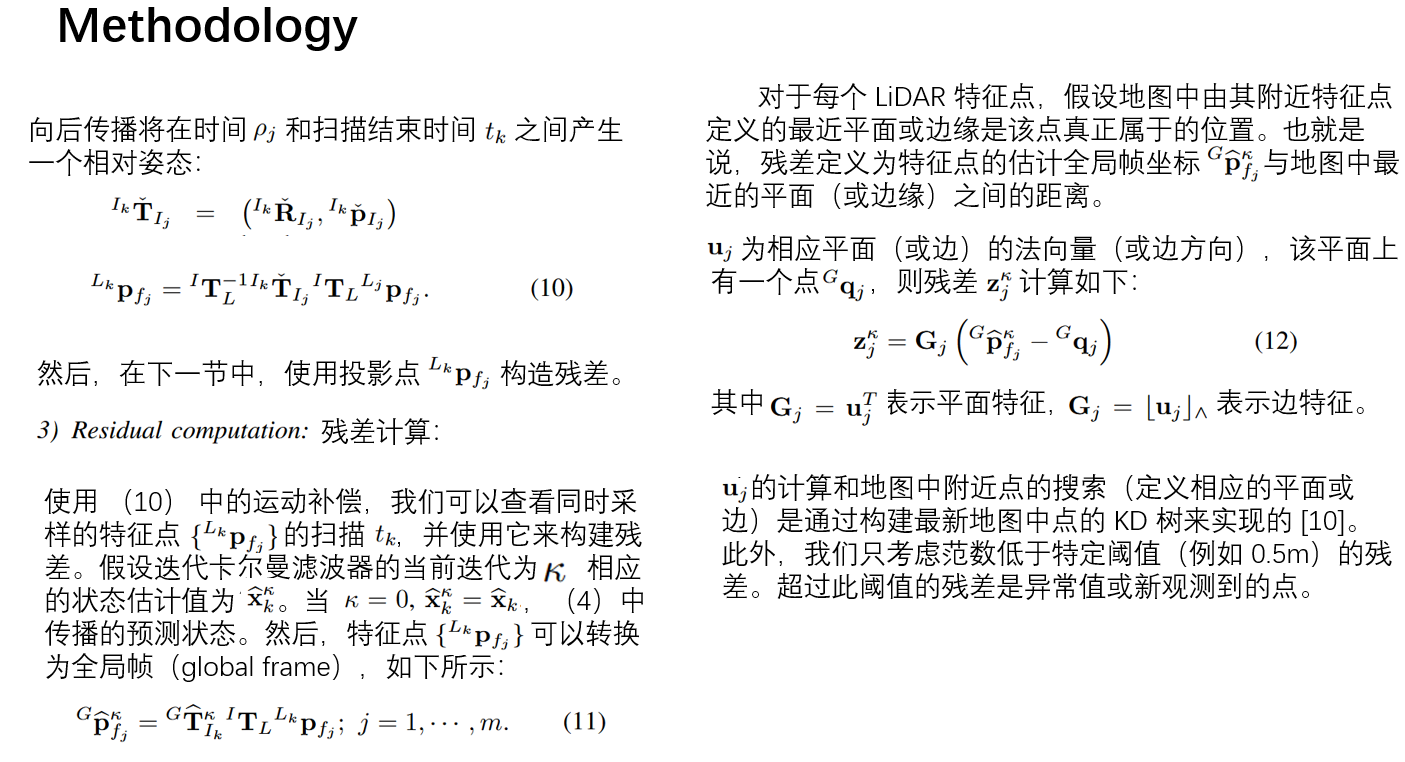
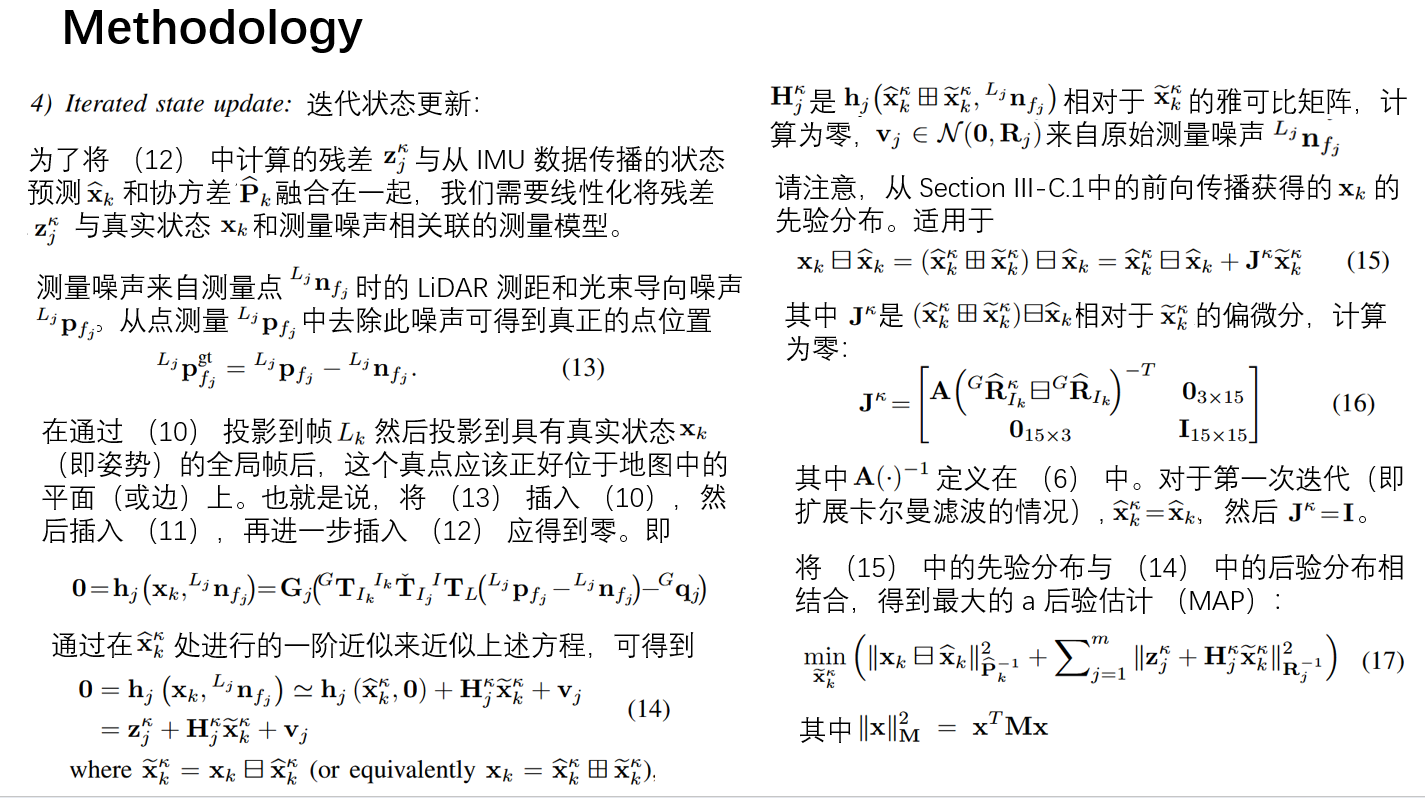
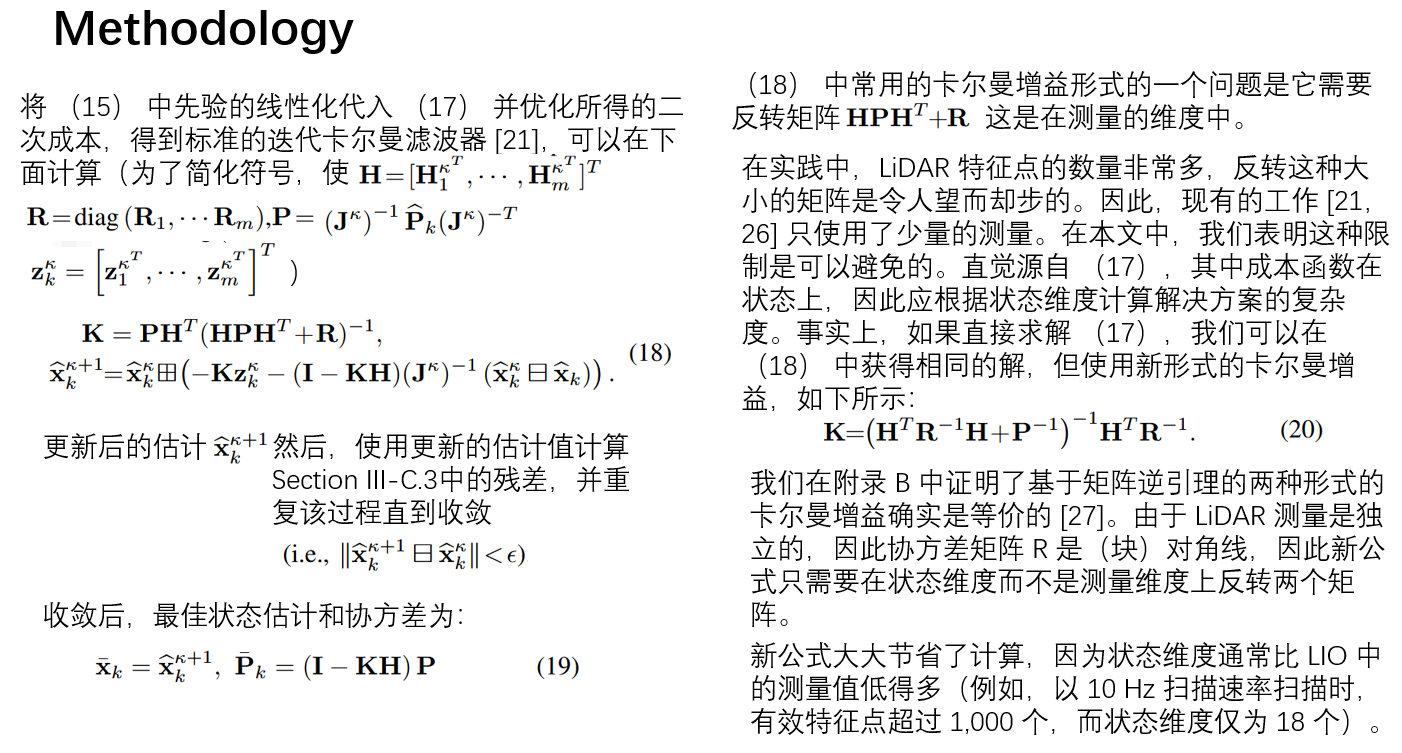
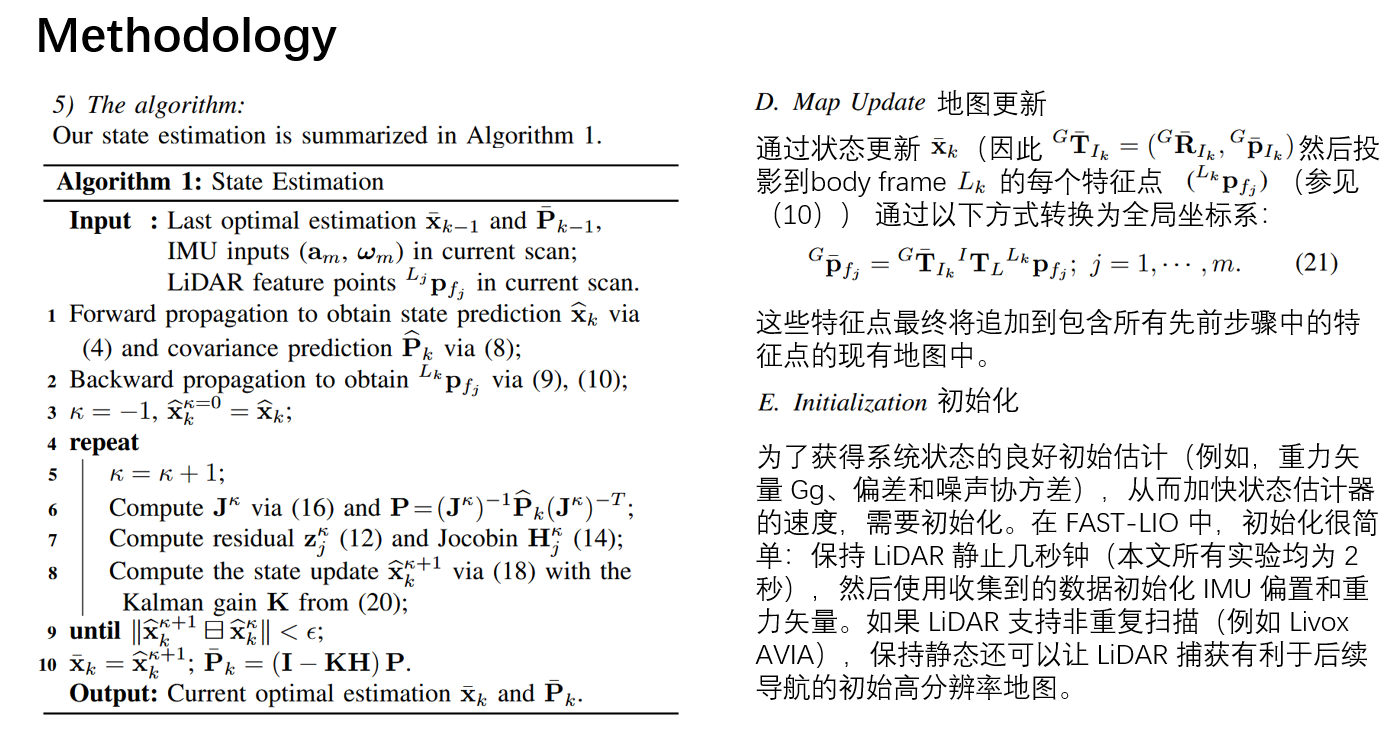
FAST-LIO原理介绍
运行环境配置
环境要求:
- ubuntu:22.04
- ros2:humble
❇️创建Docker容器
docker run -it -p 6080:80 -p 10000:10000 -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=host.docker.internal:0.0 -e PULSE_SERVER=host.docker.internal --name=DockerUnityRos2Car4 docker.1ms.run/ubuntu:22.04 /bin/bash❇️安装ros2
apt updateapt-get install sudo -ysudo apt install software-properties-common -ysudo add-apt-repository universe # 按后面Entersudo apt update && sudo apt install curl gnupg2 -ysudo curl -sSL https://gitee.com/tyx6/rosdistro/raw/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgecho \"deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main\" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullapt install curl gnupg2 -y# 这一步先打开科学上网,不然会报错curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg# 这一步先关闭科学上网,不然会报错sudo apt update && sudo apt upgrade -ysudo apt install ros-humble-desktop -y❇️添加终端启动sh
echo \"source /opt/ros/humble/setup.bash\" > ~/.bashrc❇️安装第三方库
# 重新开一个终端sudo apt install python3-colcon-common-extensions -y sudo apt-get install ros-humble-rqt-tf-tree -yapt-get install gdb -yapt-get install ros-${ROS_DISTRO}-pcl-ros -y❇️安装驱动库
# git clone https://github.com/Livox-SDK/Livox-SDK2.gitcd third_party_libraries/Livox-SDK2mkdir buildcd buildcmake .. && make -jsudo make install# git clone https://github.com/strasdat/Sophus.gitcd third_party_libraries/Sophus# git checkout 1.22.10mkdir build cd buildcmake .. -DSOPHUS_USE_BASIC_LOGGING=ONmakesudo make install# git clone https://github.com/borglab/gtsam.git#!bashcd third_party_libraries/gtsammkdir buildcd buildcmake ..# make check # make check只是在你安装之前对你的环境以及源码等进行检测以确保编译安装正确的,你可以跳过这一步sudo make install❇️编译
第一次编译
cd 2_replicate_fast_lio_two_version/src/livox_ros_driver2sudo chmod +x build.sh./build.sh humble第二次开始
cd 2_replicate_fast_lio_two_version/colcon build运行测试
数据下载
(1)百度网盘下载
链接: https://pan.baidu.com/s/1ILQ2WnI81AxU89gmk92zww?pwd=n5r3 提取码: n5r3
(2)Google网盘下载: https://drive.google.com/drive/folders/1CGYEJ9-wWjr8INyan6q1BZz_5VtGB-fP
FAST_LIO算法运行测试
cd 2_replicate_fast_lio_two_versionsource install/setup.bashros2 bag play /root/2_replicate_fast_lio_two_version/src/docs/place_data_here/rosbag2_2024_06_20-16_46_47cd 2_replicate_fast_lio_two_versionsource install/setup.shros2 launch fast_lio mapping.launch.py config_file:=mid360.yaml
FAST_LIO2算法运行测试
cd 2_replicate_fast_lio_two_versionsource install/setup.bashros2 bag play /root/2_replicate_fast_lio_two_version/src/docs/place_data_here/rosbag2_2024_06_20-16_46_47cd 2_replicate_fast_lio_two_versionsource install/setup.bash ros2 launch fastlio2 lio_launch.py
参考
- FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
- Ericsii/FAST_LIO_ROS2: ROS2 version of FAST_LIO2
- livox-mid360激光雷达三维重建川大校园_哔哩哔哩_bilibili
- FAST-LIO论文解读与详细公式推导
- 雷达惯性里程计论文阅读笔记—FAST-LIO2 (二)
点击下方👇 卡片👇,选择 关注公众号 ,发送 DockerRos2UnityCar 获取代码


