解密NVIDIA高级辅助驾驶安全全景:从 AV 2.0 到闭环落地_av2.0
在当前高级辅助驾驶技术如火如荼的发展浪潮中,“安全”不仅是口号,更是一场持久战。NVIDIA 凭借在 AI 和加速计算方面的深厚功底,将自己的平台和工具投入到一线测试与研发,从共享出行、货运物流到无人出租车,他们都在为真正安全上路持续努力。回想在测试场上,看到一辆搭载 DRIVE AGX 的测试车在复杂路况中游刃有余——这背后是上千名工程师夜以继日的打磨,也让我更加相信,技术与流程的双重保障,才是给人信心的关键。

一、迈入 AV 2.0:从模块化到端到端
高级辅助驾驶领域经历了从“模块化堆砌”到“端到端整合”的跨越式演进。AV 1.0 阶段,各个团队分别负责感知、跟踪、预测、规划和控制,像流水线一样层层衔接,却往往因接口复杂而难以协同。AV 2.0 的到来,以一个大规模统一 AI 模型替代多个子模块,从摄像头、雷达等传感器原始数据直接生成车辆行驶轨迹。
这种改变不仅让流程更简洁,还能利用端到端优化的优势自动识别罕见或复杂场景。例如,面对突发行人横穿马路或极端天气下的视线模糊,一体化模型能结合多路输入信息进行整体评估,而非依赖某个子模块单点突破。NVIDIA 针对 AV 2.0 提出了“铁人三项”开发体系:
- AI 训练:在 DGX 级别的超级计算机上,使用海量真实与合成数据训练模型;
- 仿真验证:借助 Omniverse/OVX 平台打造逼真反事实场景,大规模测试模型在“极端情况”下的表现;
- 车端部署:在 DRIVE AGX 上运行经过验证的模型,依托 DriveOS 管理系统级安全与调度。
个人感悟:AV 2.0 更像是把传统的汽车电子架构彻底重塑,将各模块“打碎重组”成一个更灵活、更易优化的整体,提升了安全性和可追溯性,这一步值得所有研发团队深入思考。
二、安全高级辅助驾驶的四大支柱
要让一辆车真正上路,NVIDIA 提出了贯穿整个研发布署流程的“四大支柱”,每一根都不可或缺:
-
AI 设计与实施平台
- 硬件:DRIVE AGX Hyperion 集成全套传感器;Orin SoC 提供 254 TOPS 计算;Thor SoC 引入 Blackwell 架构,可达 1,000 INT8 TOPS。
- 软件:DRIVE SDK 包含 DriveOS(安全 OS)、TensorRT(推理引擎)和 DriveWorks(中间件),支持从算法开发、测试到车端部署的全流程。
这种软件+硬件协同的设计,让升级路径更顺畅,L2+ 到 L5 完全高级辅助驾驶都能复用同一套架构。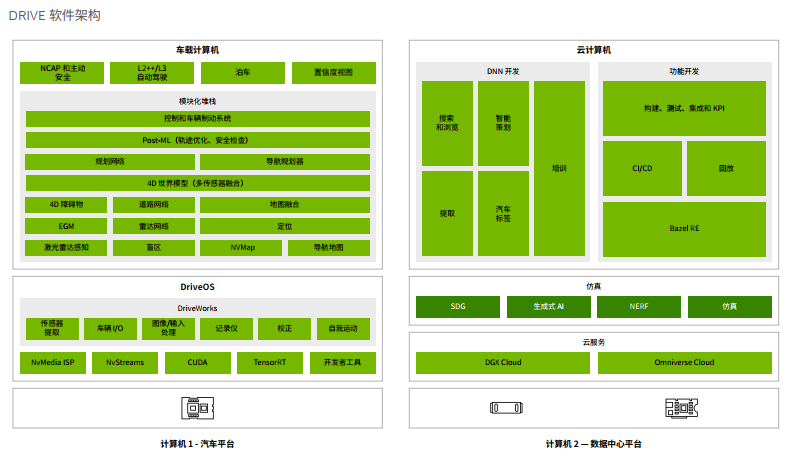
-
深度学习开发基础设施
- DGX 系统:高性能 AI 超级计算机,专为训练庞大神经网路而建;
- Omniverse Cloud Sensor RTX:基于真实物理渲染的云端仿真,引入合成数据补充真实采集难以覆盖的场景。
对于极端气象、罕见道路条件等仿真环境,它让团队有机会“试跑”更多可能的危险情况。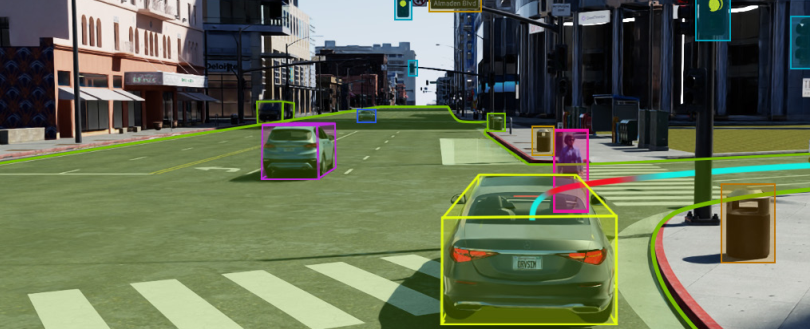
-
物理精准传感器仿真
- 基于 OpenUSD 的闭环仿真,将摄像头、雷达、激光雷达和超声波传感输出与真实回放结合;
- 神经重建引擎:利用 AI 提取实车数据细节,重构成可编辑虚拟场景,极大提升仿真的丰富度与可控性。
正如给模型一个“沉浸式试驾场”,越接近真实,就越能在上线前发现潜在问题。 citeturn0file0
-
功能安全与网络安全计划
- 功能安全(ISO 26262 & SOTIF):从系统架构到 SoC,再到应用层面,每个环节都进行故障模式分析,并按 ASIL 分级设计冗余与故障回退;
- 网络安全(ISO/SAE 21434 & UNECE R155):从代码审计、渗透测试到漏洞响应,与 Auto-ISAC、NIST、GDPR 协同防御。
在车载网络日益复杂的今天,多层次安全策略让整个系统更有韧性,也更易面对未知威胁。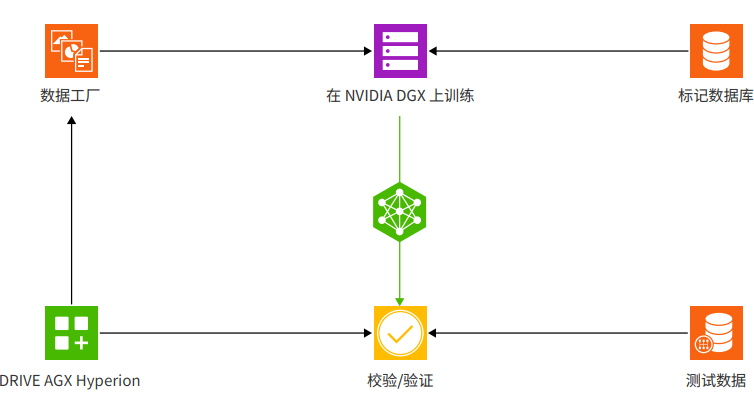
三、从架构到实车:端到端闭环
将技术转化为可落地的产品,NVIDIA 建立了完备的闭环:
- 安全架构落地:遵循 V 模型,早在需求阶段就建立安全目标,贯穿硬件设计、固件、软件开发和系统集成,确保在检测到故障时能平稳进入最小风险状态。
- 数据工厂:每天 PB 级数据在标注团队手中被细致打标签,包括物体、场景、天气、时间等多维度信息,为模型迭代持续贡献新鲜血液。
- 道路测试:《DRIVE 道路测试操作手册》参照航空飞行手册标准,明确测试人员职责和流程,结合远程监控系统,全程记录,保证可追溯。
- 开发者培训:DLI 和 GTC 大会提供从感知到控制的全流程培训,已培养超过 200 万注册开发者。
正如我所见,高级辅助驾驶是一场系统工程,缺少任一路径的协同,安全性都无从谈起。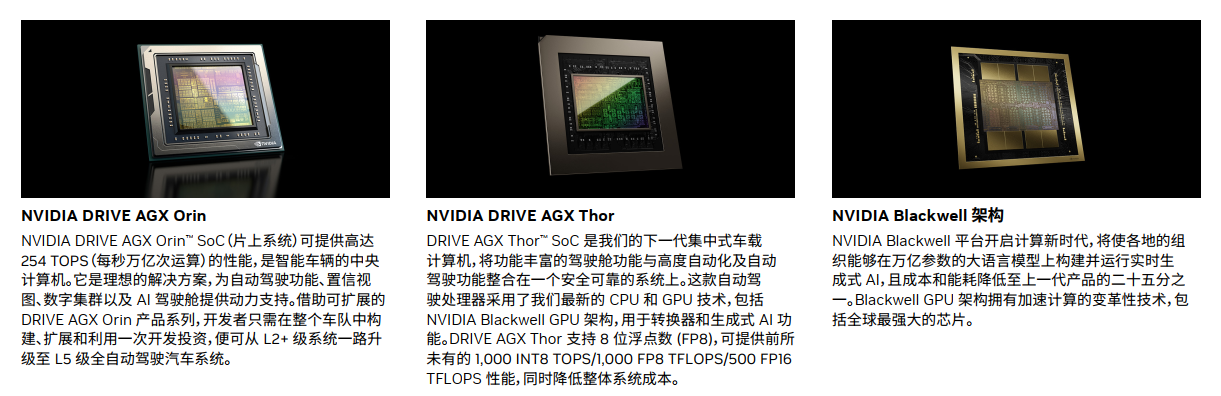
四、标准与认证:严格把关
实践与认证齐头并进可以最大限度提升可靠度:
- DRIVE 核心流程通过 TÜV SÜD ISO 26262 ASIL D;
- Orin SoC 主板获 ASIL D(系统)和 ASIL B(随机故障)双重评估;
- DriveOS 6.x 正在进行 ASIL D 认证。
同时,他们也参照 Euro NCAP 2025 路线图,测试自动紧急制动、行人保护、驾驶员监控和儿童存在检测等场景,进一步验证整个流程的有效性。
这些认证,如同对整个技术栈的一次次锤炼,让人对其安全性更加放心。
五、参与国际标准化:话语权很重要
参与制定标准,才能更好地影响行业未来:
- ISO TC 22/SC 32/WG 8(ISO 26262)与 WG 13(安全验证);
- ISO TC 22/SC 32/WG 14(ISO PAS 8800 & AI);
- IEEE 2846-2022(决策模型)与 P2851(安全数据格式);
- UNECE R155(网络安全管理)与 SAE J3101(安全基模块)等。
这让 NVIDIA 的实践与全球最新规则保持一致,也为整个行业提供了可参考的标杆。
六、fVDB:虚拟场景的“秘密武器”
fVDB 是基于 OpenVDB 的开源框架,把真实 3D 数据变成可操作的仿真场景:
- 用神经重建把实车数据还原成可编辑模型;
- 在 Omniverse 里通过 NIM 微服务一键生成合成数据和标签;
- 极大提升夜间、恶劣天气和复杂路口等罕见场景的覆盖度。
我觉得,这让测试的可能性和效率都上了一个台阶。
七、网络安全:多层防线
除了功能安全,NVIDIA 还在网络安全上下了大功夫:
- 遵循 ISO/SAE 21434 和 UNECE R155;
- 与 Auto-ISAC、NHTSA、NIST、GDPR 协同,做静态/动态分析和渗透测试;
- 组建专职漏洞响应团队,联合供应商快速处理安全事件;
- 用 AI 实时监测总线通信和行为异常,对抗零日攻击。
在“万物互联”的时代,这种多层次的防护才算真·可靠。
八、无线更新与持续迭代
NVIDIA DRIVE 支持 OTA(Over-the-Air)无线升级,厂商可以在合规后把新算法、安全补丁推送到所有在役车辆,让它们随时保持最新状态。这也让技术和安全能跟上快速变化的需求。
总体来看,NVIDIA 用一整套端到端的 AI 平台和严谨的安全流程,已经成为 80 多家高级辅助驾驶公司上路测试时的首选。笔者觉得,随着仿真能力、模型规模和车端算力不断提升,AI 定义的安全驾驶会越来越靠谱,也更快走进我们的日常生活。技术固然重要,但对“安全”的尊重和投入,才能真正让无人驾驶从愿景变成现实。
白皮书:高级辅助驾驶安全报告
https://img-bss.csdnimg.cn/bss/NVIDIA/auto-self-driving-safety-report-ZH%20%28Mar%20updated%29.pdf
NVIDIA 高级辅助驾驶实验室技术干货视频及博客访问入口:
https://marketing.csdn.net/p/54ce0f507fc676a9f8a5b8a179b0e49a?pId=2952

