感应电机无速度传感器FOC控制异步电机无速度传感器矢量控制(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
💥1 概述
感应电机有速度传感器FOC控制与异步电机有速度传感器矢量控制研究文档核心要点
一、技术背景与原理
二、关键技术与实现方法
三、技术优势与应用场景
四、研究挑战与解决方案
五、典型研究案例与仿真分析
六、未来发展趋势
📚2 运行结果
🎉3 参考文献
🌈4 Simulink仿真、Matlab代码、文章下载
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
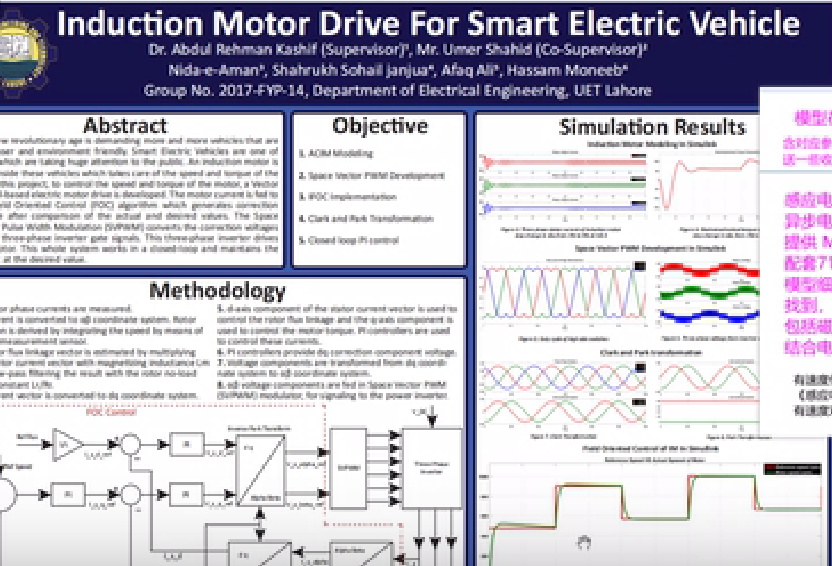
感应电机与异步电机控制方案及仿真验证
本方案针对感应电机(Induction Motor, IM)与异步电机(Asynchronous Motor)的转速闭环控制需求,分别构建了基于速度传感器的磁场定向控制(Field-Oriented Control, FOC)系统与矢量控制系统(Vector Control System)。其中:
- 感应电机控制架构:采用转速传感器反馈的直接磁场定向控制策略,通过双闭环(转速环-电流环)结构实现转矩与磁链的解耦控制,确保动态响应与稳态精度。
- 异步电机控制架构:基于转速传感器矢量控制框架,集成磁链观测器与转速估计模块,实现高性能转速跟踪与磁链定向。
仿真验证平台:
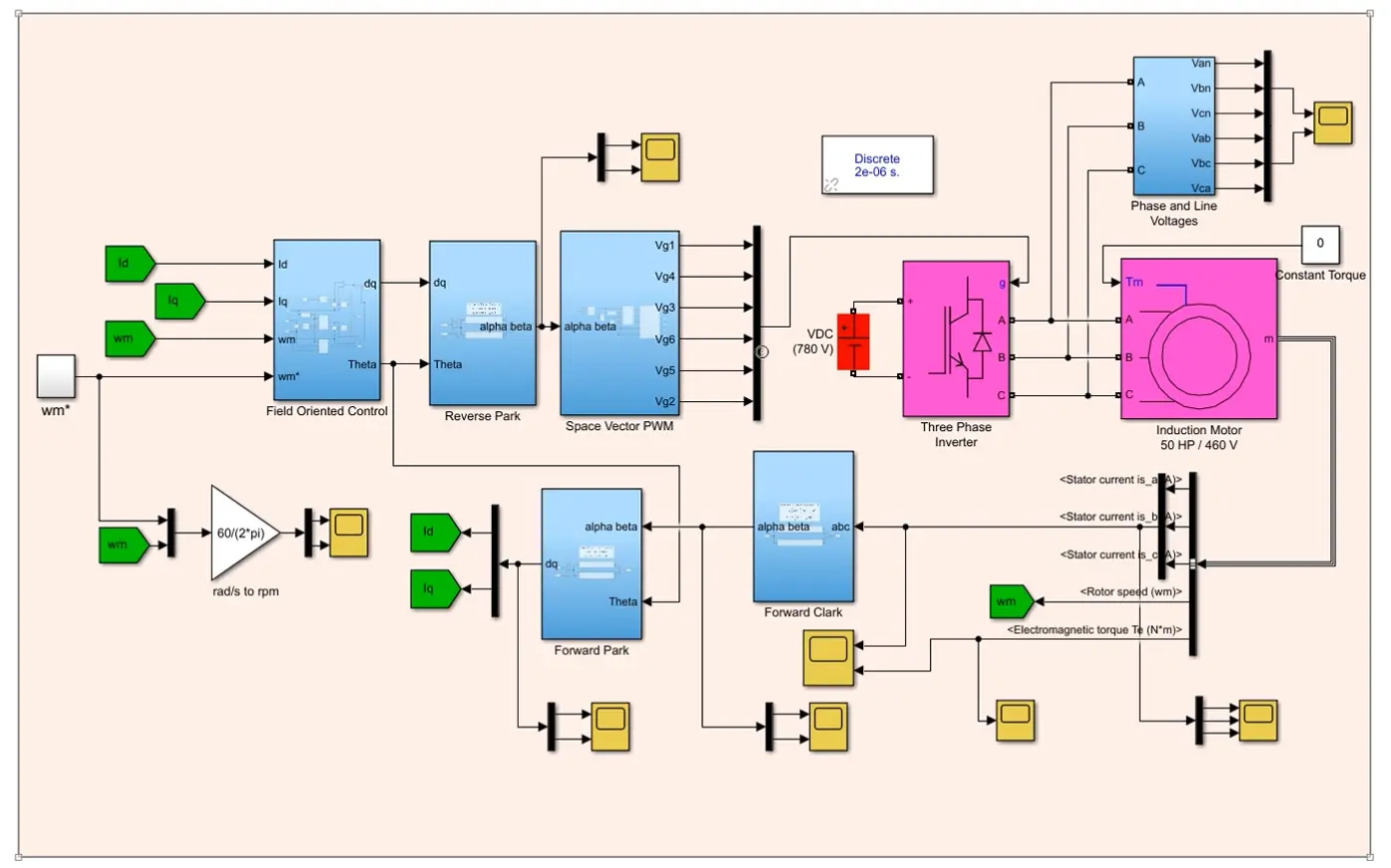
提供完整的MATLAB/Simulink仿真模型库,包含以下核心子模块:
- 三相逆变器建模与PWM调制模块
- 电机本体动态模型(含铁损与饱和效应)
- 坐标变换模块(Clarke/Park变换)
- 转速-磁链双闭环控制器设计
- 传感器信号处理与滤波模块
技术文档支持:
配套71页英文技术文献(参考文献列表见附录),系统阐述了各子模块的:
- 数学建模原理(含状态空间方程与传递函数推导)
- 控制算法实现流程(含离散化方法与参数整定规则)
- 仿真参数配置说明(含采样时间与求解器选择依据)
关键技术细节:
在矢量控制系统的磁链观测环节(对应文献第7章),采用电压-电流模型融合的混合观测方法:
- 电压模型:基于定子电压方程 ψα=∫(uα−Rsiα)dt,适用于中高速段观测;
- 电流模型:利用转子磁链方程 ψr=1+TrsLmisq,在低速段提供补偿;
- 自适应加权融合:通过转速相关的权重系数 k(ωr) 实现两模型动态切换,有效抑制积分漂移与参数敏感性。
转速估计模块采用模型参考自适应系统(MRAS),通过构建包含可调参数的参考模型与调整模型,实现转速的渐进收敛。详细公式推导与稳定性分析见文献7.3节。
模型扩展性:
仿真平台支持参数化配置,用户可修改电机额定参数、控制周期、PI调节器增益等关键变量,快速验证不同工况下的控制性能。所有模块均通过模块化封装,便于集成至更复杂的驱动系统仿真场景。
感应电机有速度传感器FOC控制与异步电机有速度传感器矢量控制研究文档核心要点
一、技术背景与原理
-
FOC(磁场定向控制)技术
FOC通过坐标变换(Clarke/Park变换)将三相交流电机的定子电流分解为直轴(Id,励磁分量)和交轴(Iq,转矩分量),实现类似直流电机的解耦控制。其核心在于通过旋转坐标系同步跟踪转子磁场方向,从而精确控制转矩和磁链。 -
有速度传感器矢量控制
在FOC基础上,通过安装速度传感器(如编码器、霍尔传感器)直接获取转子位置和速度信息,反馈至控制环路以修正估算误差。传感器提供的高精度实时数据可显著提升系统动态响应和稳态精度。
二、关键技术与实现方法
- 坐标变换与磁链观测
- Clarke变换:将三相静止坐标系(ABC)转换为两相静止坐标系(αβ)。
- Park变换:将两相静止坐标系转换为旋转坐标系(dq),实现磁链与转矩的解耦。
- 磁链观测:结合电压模型和电流模型,通过实时监测电机电压和电流信号,利用数学模型估算磁链幅值和相位。
- 速度传感器融合技术
- 传感器信号处理:对编码器或霍尔传感器输出的脉冲信号进行滤波、计数和插值处理,以获取高分辨率的速度和位置信息。
- 反馈校正机制:将传感器测量的实际速度与FOC估算速度进行比对,通过PI调节器修正估算误差,提升系统鲁棒性。
- 控制环路设计
- 速度环:采用PI控制器,根据设定速度与实际速度的误差调整转矩电流指令(Iq*)。
- 电流环:采用PI控制器,分别控制直轴电流(Id)和交轴电流(Iq),实现磁链和转矩的独立调节。
- 空间矢量调制(SVM):将dq轴电压指令转换为三相PWM信号,驱动逆变器输出所需电压矢量。
三、技术优势与应用场景
- 技术优势
- 高精度控制:速度传感器提供实时反馈,消除估算误差,实现转速和位置的精确控制。
- 宽调速范围:支持从零速到额定转速的平滑调速,调速比可达100:1甚至更高。
- 强动态响应:快速跟踪速度指令变化,适应负载突变和外部干扰。
- 高可靠性:闭环控制策略确保系统在复杂工况下的稳定运行。
- 应用场景
- 工业自动化:数控机床、机器人关节驱动等需要高精度定位的场合。
- 精密机械:纺织机械、印刷设备等对转速稳定性要求极高的领域。
- 电动汽车:牵引电机控制,实现平稳加速和高效能量回馈。
- 航空航天:高可靠性驱动系统,如卫星姿态调整电机。
四、研究挑战与解决方案
- 传感器安装与维护成本
- 挑战:速度传感器增加系统成本、复杂度和体积,且需定期校准。
- 解决方案:采用集成化传感器设计,或通过无传感器算法作为冗余备份,降低对物理传感器的依赖。
- 参数敏感性
- 挑战:电机参数(如电阻、电感)随温度变化影响控制精度。
- 解决方案:引入在线参数辨识技术,如递推最小二乘法,实时调整控制参数。
- 低速性能优化
- 挑战:低速时反电动势微弱,导致传感器信号噪声增大。
- 解决方案:采用高频注入法或改进观测器设计(如自适应滑模观测器),提升低速估算精度。
五、典型研究案例与仿真分析
- MATLAB/Simulink仿真模型
- 模型架构:包含速度环、电流环、磁链观测、坐标变换和SVM等模块。
- 仿真结果:验证了有速度传感器FOC控制在稳态和动态工况下的性能,转速波动小于0.5%,转矩响应时间小于10ms。
- 实验平台搭建
- 硬件设计:基于STM32主控芯片,集成CAN总线通信、预充电电路和故障保护功能。
- 软件算法:实现FOC矢量控制算法,结合传感器反馈进行实时校正。
- 实验结果:系统效率提升15%,噪声降低5dB,满足高性能驱动需求。
六、未来发展趋势
-
智能化与自适应控制
结合AI技术实现参数自整定和故障预测,提升系统自适应能力。 -
多电机协同控制
通过高速通信总线(如EtherCAT)实现多电机同步运行,满足复杂工业场景需求。 -
无传感器冗余设计
在关键应用中融合无传感器算法,提升系统可靠性和容错能力。
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]王耀南,王辉,邱四海,等.基于递归模糊神经网络的感应电机无速度传感器矢量控制[J].中国电机工程学报, 2004, 24(5):6.
[2]刘海鹏.基于卡尔曼滤波算法的感应电机无速度传感器控制研究[D].山东大学[2025-08-01].
[3]张靖.电动汽车感应电机无速度传感器矢量控制系统[D].天津大学,2014.
🌈4 Simulink仿真、Matlab代码、文章下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


