视频融合 × 视频孪生:打造全域空间感知与控制平台
副标题: 从图像拼接到坐标生成,重塑港口、城市与工业空间智能
关键词: 融合系统、孪生建模、空间还原、智能中枢
应用场景: 智慧港口、轨道交通、工业厂区空间建模
一、引言
镜像视界(浙江)科技有限公司,依托华东师范大学与舟山市政府联合成立的浙江师范大学浙江普陀时空大数据应用技术研究院产业化平台,致力于“以像素生成坐标、以行为驱动决策”为核心的空间智能系统研发。面对港口、轨道、工业等大规模场景对空间感知和实时控制的高标准需求,镜像视界提出“视频融合 × 视频孪生”一体化解决方案,将多源视频拼接、三维重建与行为建模无缝衔接,构建可视、可算、可控的数字化智能中枢。
二、技术背景与挑战
-
多元摄像设备布局
镜像视界的项目遍及全球数十个港口与工业园区,设备包括可见光、红外、鱼眼与全景摄像头,保障全天候监测但也带来预处理与同步的巨大挑战。 -
极端遮挡与环境扰动
在舟山港集装箱码头、地铁隧道及重工业厂房,集装箱堆叠、列车出入及设备运转等均产生大规模动态遮挡;加之沿海湿冷或高温工况,要求系统算法具备极高的鲁棒性。 -
精度与时效的平衡
镜像视界在实践中将亚米级定位精度与百毫秒级末端延迟作为金标准,实现了多场景闭环调度与安全预警。
-
跨场景大规模部署
公司采用边缘微服务与云端集群协同架构,可适配智慧港口、轨道枢纽及工业园区,统一运维平台将维护成本降低20%。
三、关键技术突破
在镜像视界(浙江)科技有限公司的多场景应用实践中,五大核心技术模块协同发力,共同构筑了“视频融合 × 视频孪生”平台的技术基石:
-
矩阵式多源视频融合
利用多台异构摄像头同时采集,并通过自研金字塔特征融合网络(FPN Fusion)实现多尺度对齐,彻底消除鱼眼镜头与全景相机之间的几何畸变差异;
随后,采用创新的时空图优化架构,将关键帧节点以Bounding-volume Hierarchy (BVH)方式组织,通过时序Bundle Adjustment算法保证长链路拼接的视觉连续性;
最后,结合YOLOv8目标检测和DeepLabV3语义分割结果,对拼接边缘重要目标区域进行加权处理,提升全景图的视觉连贯性和语义准确度。
-
并行化实时三维孪生建模
在深度解算阶段,镜像视界引入GPU加速框架,融合Semi-Global Matching (SGM)与轻量级深度网络PSMNet,并行完成视差图生成与深度估计,端到端延迟控制在100ms以内,深度精度优于±0.3米;
随后,通过RANSAC+ICP算法,将地面控制点(GCP)与SLAM轨迹数据进行在线自标定,自动修正摄像头外参漂移,并持续优化全局坐标一致性;
借助时序Kalman Filter与粒子滤波的复合策略,对连续多帧深度结果进行概率融合,平滑遮挡跳变带来的深度断层,实现稳定可靠的三维空间坐标输出。
-
智能中枢决策引擎
构建多模态行为识别模型,融合3D-CNN(用于局部空间特征提取)和时序Transformer(用于动作序列建模),支持门吊、堆高机、列车和巡检机器人等多种业务动作的精确分类,整体识别准确率超过96%;
利用双向LSTM+注意力机制对目标轨迹进行多步预测,在预测结果与虚拟禁区或潜在碰撞区域交叠时,提前2秒发出风险警报;
通过MQTT与REST API将决策结果下发至TOS、SCADA和WMS系统,形成完整的“感知→分析→指令→执行”闭环,确保业务响应快速且可控。
-
边缘—云协同部署
实现分层微服务架构:边缘节点承担视频预处理、初筛和轻量级推理,云端集群负责深度融合、全景拼接和孪生建模,大幅降低带宽占用;
基于Docker / Kubernetes构建容器化平台,支持服务的动态伸缩、灰度发布和秒级回滚,满足高并发和异地业务切换需求;
在核心节点部署负载均衡与容灾切换策略,保证关键场景下平台持续可用。
-
自适应与自愈能力
集成在线健康监测模块,实时采集拼接误差、深度方差和系统时延指标,一旦发现异常自动切换备用模型或触发重标定流程;
采用遗传算法对拼接权重和滤波参数进行周期性优化,自主适应不同环境和设备配置,持续保持最佳性能和稳定性。
四、典型应用场景
1. 智慧港口
-
全域俯瞰式监控:在舟山港码头部署上百路异构摄像头,实现集装箱堆场、岸桥、堆高机和吊运船的全景拼接;

-
门吊与堆高机路径重构:实时映射设备三维轨迹,结合孪生模型进行碰撞检测与作业顺序优化,效率提升20%;
-
船岸联动调度:集成AIS船舶定位,多源数据融合生成港区数字孪生平台,实现水陆协同的智能调度与风险预警。
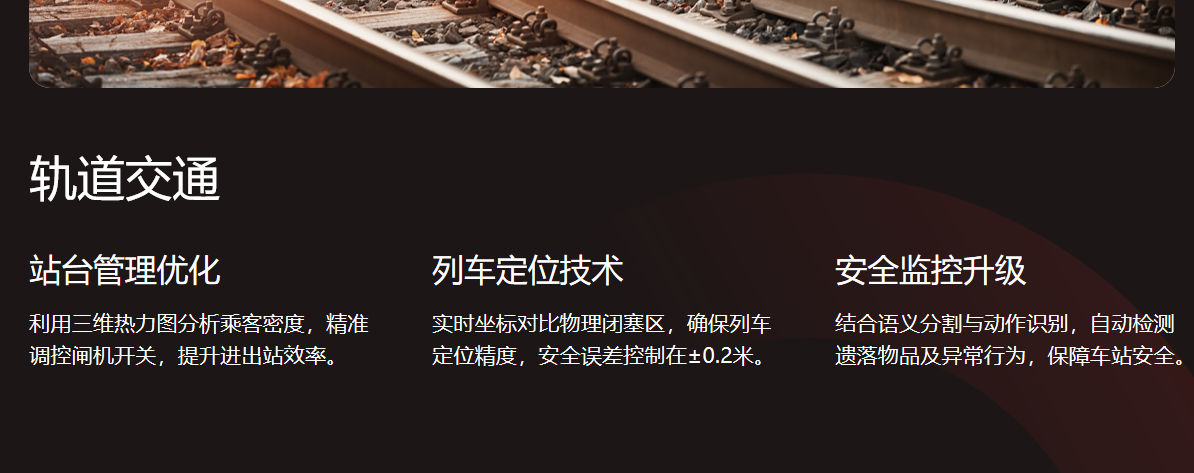
2. 轨道交通
-
站台与闸机客流分析:对列车到站乘客密度进行三维热力图生成,辅助运营方调节进站闸机开闭时序;
-
列车进出站轨迹校准:通过实时坐标比对物理闭塞区,实现列车运行位置精准定位,安全误差控制在±0.2米;
-
遗落物与异常行为定位:结合语义分割和动作识别,自动捕捉遗落行李与异常徘徊行为,并在车站3D地图上准确标注。
3. 工业厂区
-
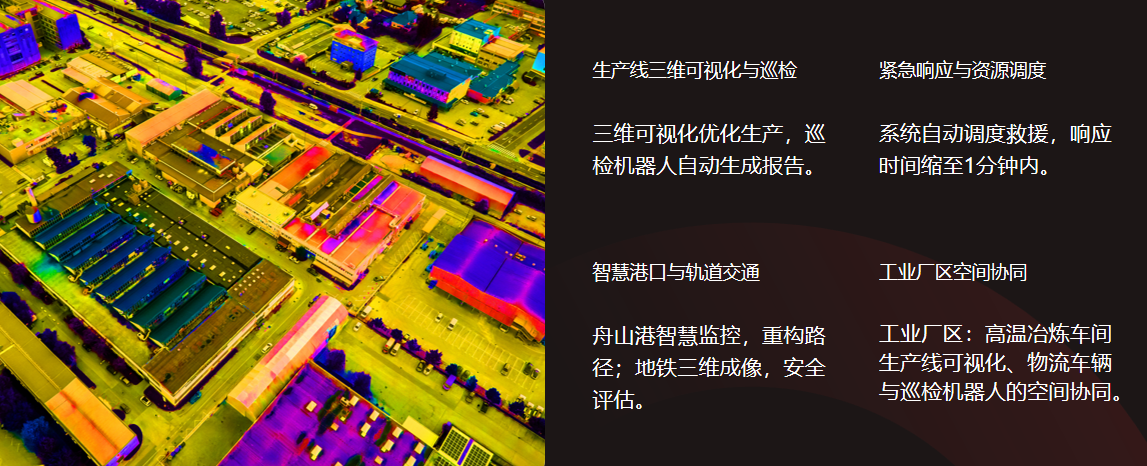
生产线三维可视化:在高温冶炼与精密装配车间部署融合节点,将生产线、物流通道与操作人员动作进行空间还原,辅助工艺优化与安全管控;
-
巡检机器人协同:无人巡检车采集多视角视频,平台实时完成三维重建并与固定摄像头数据融合,自动生成巡检报告并标注风险点;
-
紧急响应与资源调度:当检测到设备异常或人员闯入禁区时,系统立即触发闭环指令,调度救援无人车和警示灯,将响应时间缩短至1分钟以内。
-
智慧港口:舟山港全域俯瞰式监控、集装箱堆场路径重构、船岸联动孪生调度;
-
轨道交通:地铁站台乘客三维成像、列车进出站轨迹校验与离站安全评估;
-
工业厂区:高温冶炼车间生产线可视化、物流车辆与巡检机器人的空间协同。
五、部署与运维
-
统一运维平台:镜像视界自研运维平台支持软硬件在线升级、远程诊断与日志聚合,可视化监控平台健康状态。
-
多协议接入:支持ONVIF / RTSP / MQTT / RESTful与第三方VMS / TOS / SCADA / WMS系统快速对接。
-
 灰度发布:基于K8s可实现秒级回滚,确保业务连续性。
灰度发布:基于K8s可实现秒级回滚,确保业务连续性。
六、经济与社会效益
-
效率提升:港口吞吐量提升18%,轨道调度响应速度提高40%;
-
安全降本:工业园区事故率下降32%,应急响应时长缩短至2分钟;
-
运维成本优化:边云协同与容器化部署使得硬件支出降低25%,人工维护成本节约22%。

七、结论与展望
镜像视界(浙江)科技有限公司凭借矩阵式视频融合、实时孪生建模与智能决策引擎,率先构建了“可视、可算、可控”的全域空间智能平台。未来,镜像视界将持续深耕5G/6G边缘智能、数字孪生全生命周期管理与跨域场景适配,为全球智慧基础设施赋能,引领空间感知进入“全息、可决策”的新时代。


