Ubuntu 24.04 安装Isaac-sim 5.0 并导入lerobot—So101_ubuntu 24.04 安装issac
安装环境
显卡:4060ti 16g
Nvidia驱动版本:570.169
Linux版本:Ubuntu 24.04
参考资料
Isaac-sim git官网: https://github.com/isaac-sim/IsaacSim
Nvidia Isaac-sim 官网:What Is Isaac Sim? — Isaac Sim Documentation
参考教程:AI机器人开发第四课:NVIDIA Isaac Sim 5.0机器人仿真全流程实战——从资产导入到LeRobot机械臂应用_哔哩哔哩_bilibili
第一步:gcc和g++版本降级
 对于Ubuntu 24.04官网写的是GCC和G++ 12+以上的版本不支持
对于Ubuntu 24.04官网写的是GCC和G++ 12+以上的版本不支持
我安装的gcc版本是13 ,所以需要对gcc的版本进行降级
参考Ubuntu24.04版本下实现gcc版本的快速切换 - 技术视野 对gcc和g++降级
安装gcc和g++ 11
sudo apt install gcc-11 g++-11安装完成后,设置gcc默认为gcc-11
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-11 20 --slave /usr/bin/g++ g++ /usr/bin/g++-11完成后查看 gcc --version 和g++ --version结果如下
第二步:安装驱动
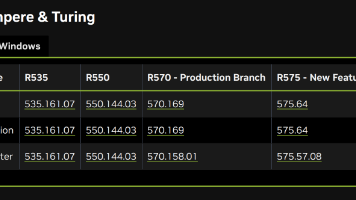
驱动版本要求如上,我的版本是570.169,应该是符合要求的,不过我看视频是安装了575的版本所以我去Nvidia官网下载了575的版本NVIDIA GeForce 驱动程序 - N 卡驱动 | NVIDIA 选择相应的配置下载run文件,运行安装即可,里面的详细选择项参考视频教程进行选择

视频教程从10min开始这一步,照着点就行了
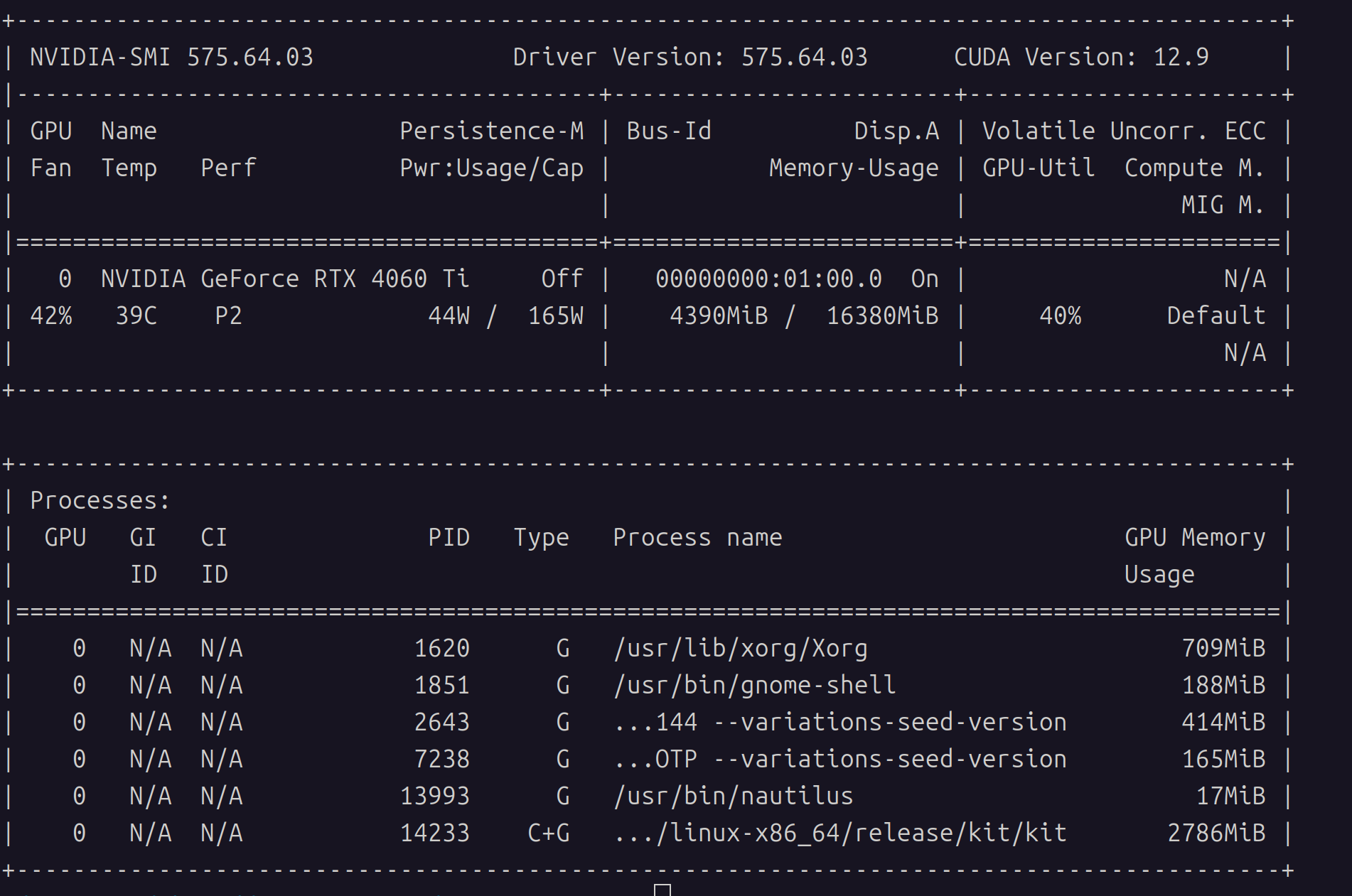
安装完之后的驱动信息如下
第三步:安装Isaac-Sim
三个必备依赖项要安装: GIt Git-lfs build-essential
然后跟着github主页的教程运行相应命令即可 https://github.com/isaac-sim/IsaacSim
git clone https://github.com/isaac-sim/IsaacSim.git isaacsimcd isaacsimgit lfs installgit lfs pull./build.sh过程中就碰到了一个网络连接的问题,挂了个梯子后解决了,安装过程大概花了10分钟左右
第四步:运行Isaac-Sim
cd /home/gl/isaacsim/_build/linux-x86_64/release ./isaac-sim.sh 按照官网教程运行,出现了问题
Failed to create any GPU devices, including an attempt with compatibility mode
参考Failed to create any GPU devices, including an attempt with compatibility mode-CSDN博客
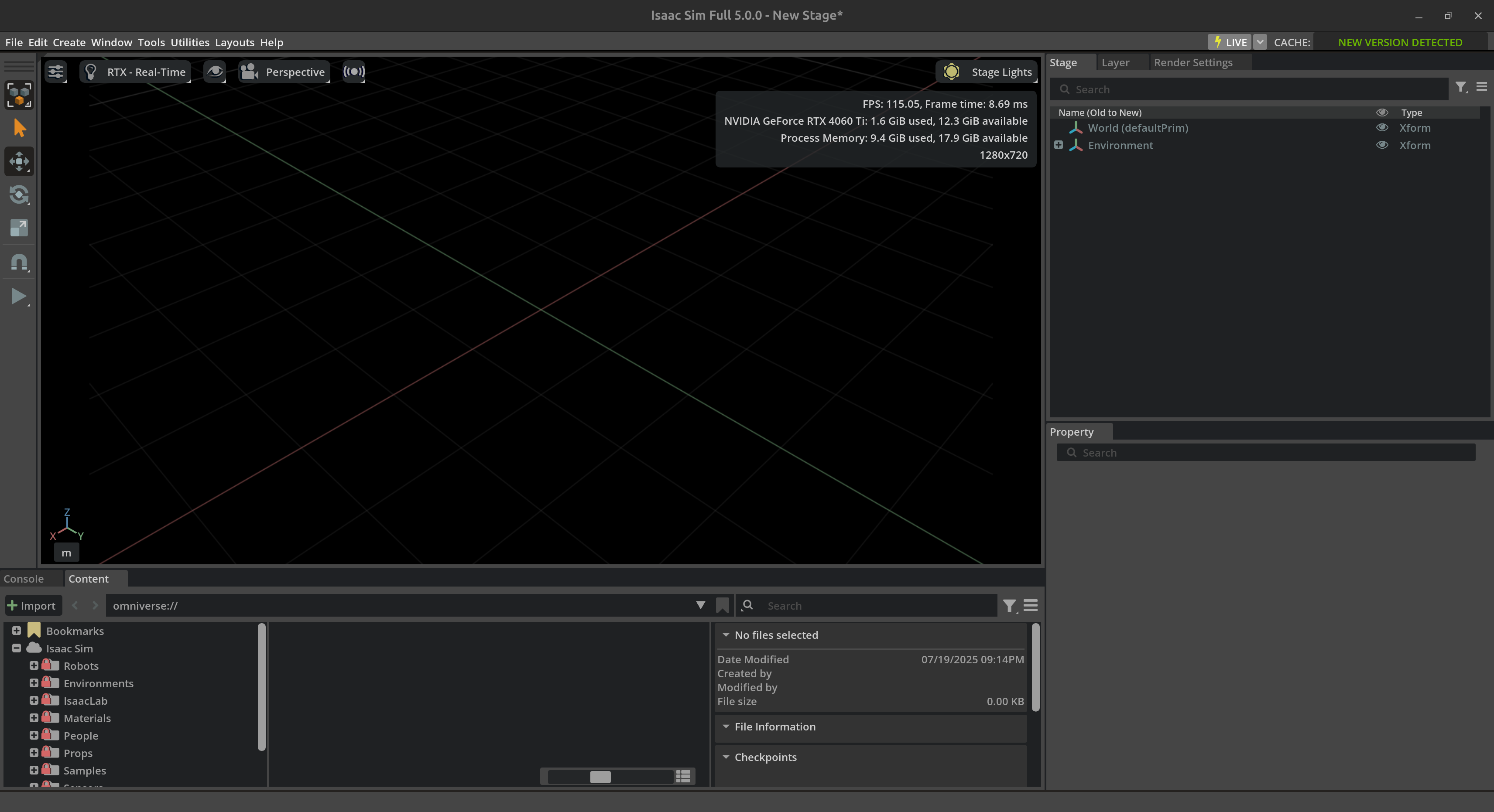
ls /etc/vulkan/icd.dls /usr/share/vulkan/icd.dsudo rm /usr/share/vulkan/icd.d/nvidia_icd.json删除掉Ubuntu自带的驱动文件后,重新运行,成功进入IsaacSim界面
第五步:导入Lerobot-So101的模型
https://github.com/TheRobotStudio/SO-ARM100
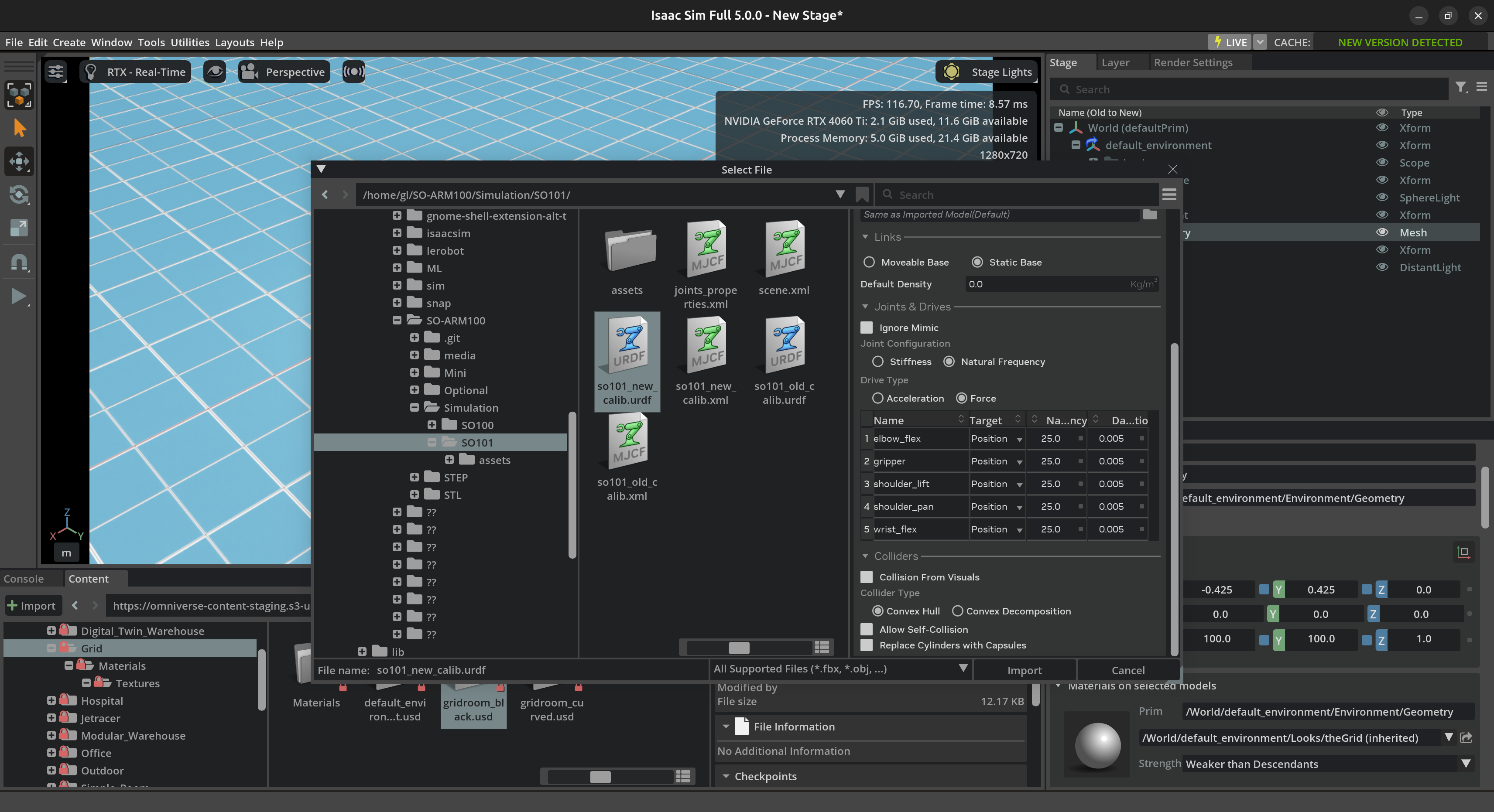
下载lerobot相关文件后,从simulation文件夹中import对应的urdf文件
tool-physical中打开physical-inspector工具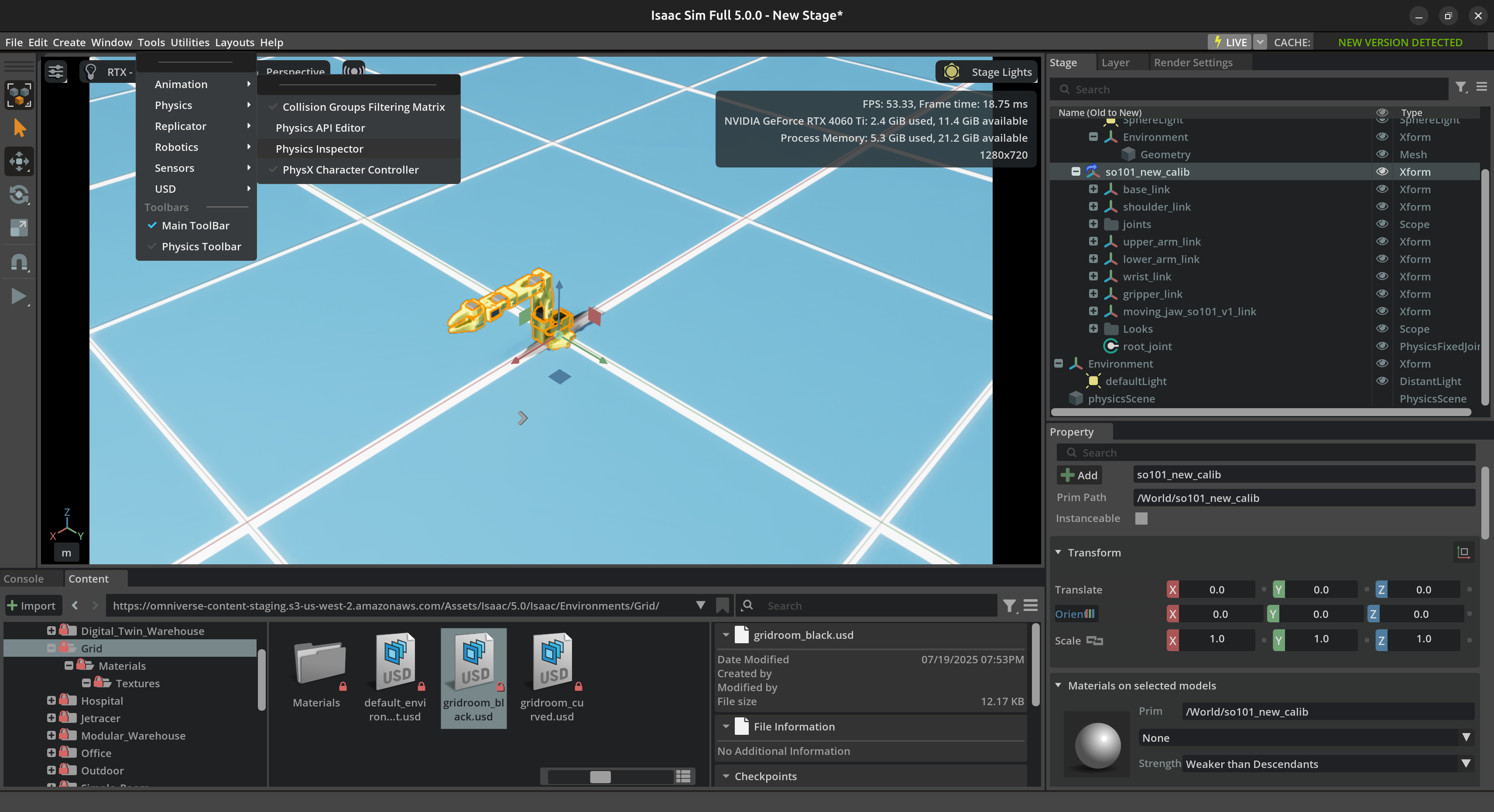
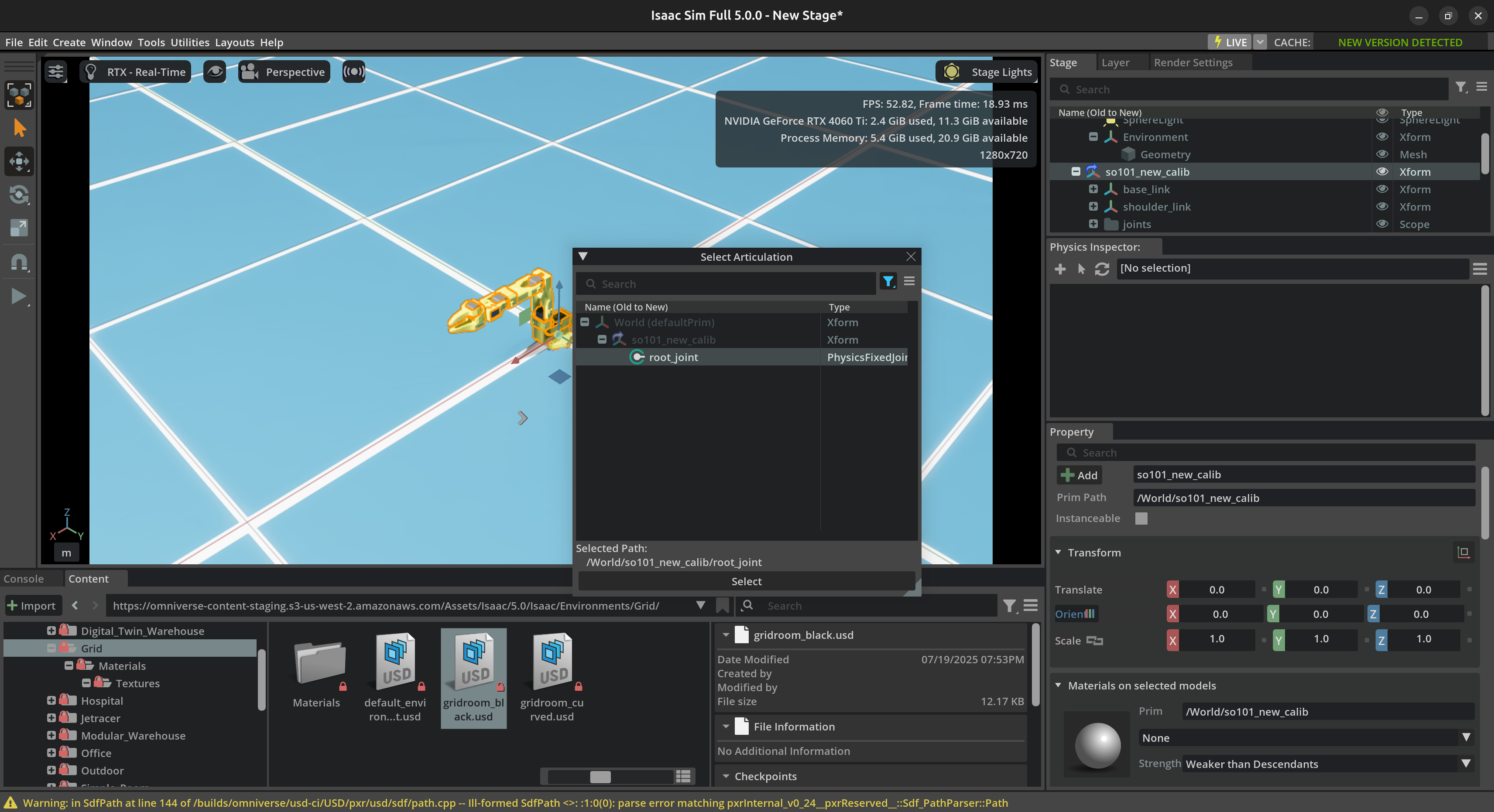
添加对像
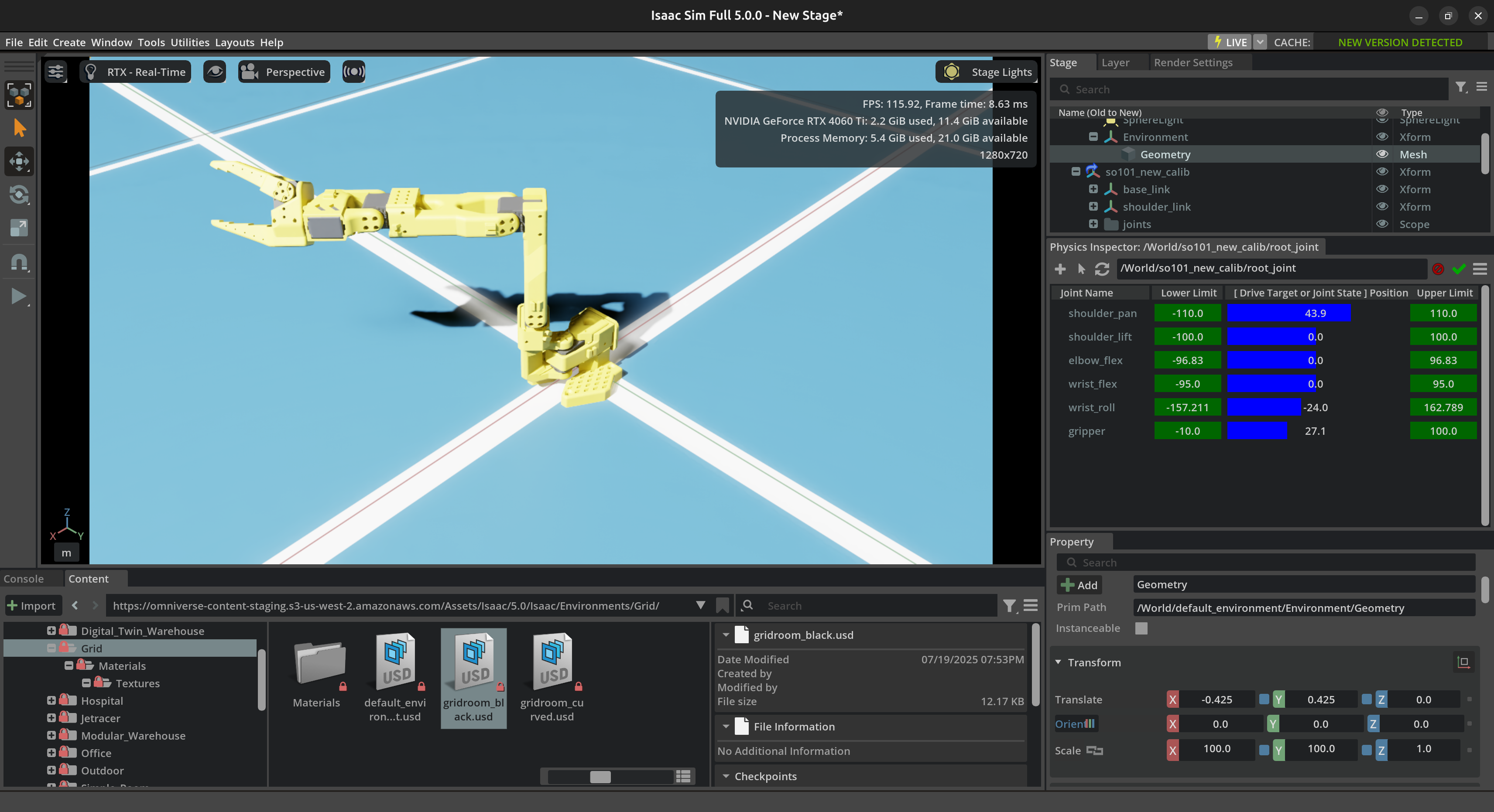
可以对每个关节的角度和夹爪的开合状态进行控制

