搭建PX4开发系统(Ubuntu 22.04)_px4开发环境搭建
本文是《从零开始学 PX4 无人机开发》系列第二篇,适合开发者在 Ubuntu 系统下快速搭建 PX4 编译与仿真环境,支持 QGroundControl、Gazebo、MAVSDK 等完整工具链。
📦 一、环境准备
✅ 推荐配置:
博主在VMware® Workstation 17 Pro虚拟机上安装了Ubuntu 22.04系统,具体安装过程不赘诉了,可以参考其他的博主内容。
🧱 二、安装 PX4 所需依赖
1️⃣ 安装基础软件:
sudo apt-get install git博主这里安装的纯净系统,首先安装了git,以便下一步获取到PX4源码。
这里也看了其他博主的一些文章,也没发现需要安装其他的依赖。

等待安装完成即可
🧰 三、克隆 PX4 源码
在克隆PX4源码时,大多数的博主都建议使用这条指令,直接从Github获取PX4源码以及直接获取小组件,在这里,博主不建议大家直接使用这条指令!!!直接使用这条指令可能会出现的两个问题,要么直接PX4的代码克隆失败,要么部分小组件克隆失败。
这里博主首先克隆PX4源码,再去获取小组件
git clone https://github.com/PX4/PX4-Autopilot.git --recursive这里,博主分了以下几个部分进行
第一步,找到github的代理点GitHub Proxy 最新地址发布,最下面找到当前用的域名。

第二步,使用如下指令
git clone https://ghfast.top/https://github.com/PX4/PX4-Autopilot.git
等待克隆结束即可。
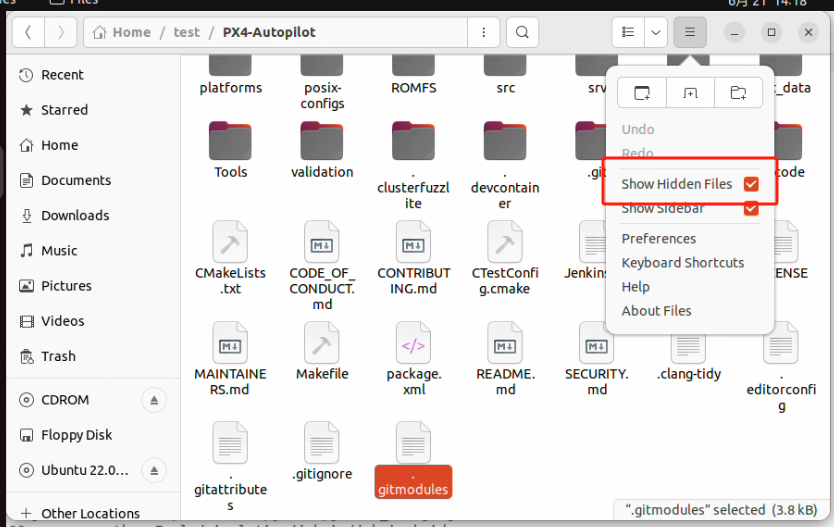
第三步,找到.gitmodules文件,这是个隐藏文件夹,如果找不到就勾选以下 ‘Show Hidden Files\'
原来从Github获取的.gitmodules内容如下
[submodule \"src/modules/mavlink/mavlink\"]path = src/modules/mavlink/mavlinkurl = https://github.com/mavlink/mavlink.gitbranch = master[submodule \"Tools/simulation/jmavsim/jMAVSim\"]path = Tools/simulation/jmavsim/jMAVSimurl = https://github.com/PX4/jMAVSim.gitbranch = main[submodule \"Tools/simulation/gazebo-classic/sitl_gazebo-classic\"]path = Tools/simulation/gazebo-classic/sitl_gazebo-classicurl = https://github.com/PX4/PX4-SITL_gazebo-classic.gitbranch = main[submodule \"src/drivers/gps/devices\"]path = src/drivers/gps/devicesurl = https://github.com/PX4/PX4-GPSDrivers.gitbranch = m

