【YOLO】Docker搭建镜像+运行容器_yolo docker
Docker搭建镜像+运行容器
- 引言
- 1. 验证宿主机安装了docker、nvidia-docker、显卡驱动
- 2. 在docker的配置文件中配置镜像加速器
- 3. 构建docker镜像
-
- 3.1 手动拉取镜像
- 3.2 编辑Dockerfile
-
- 3.2.1 x86_64/AMD64 架构
- 3.2.2 linux/arm64/v8架构
- 3.3 构建 Docker 镜像
- 4.运行docker容器
-
- 4.1 启动容器
- 4.2 进入容器
- 5.验证容器内的环境
- 6. Docker其他常用命令
- 7. 镜像与容器的指令对比
- 8. 启动容器之后还能再挂在目录吗?
-
- 方案 1:提交容器为新镜像并重新运行
- 方案 2:临时文件复制(无需重建)
- 方案 3:使用 Docker Volume(推荐持久化场景)
- 生产环境建议
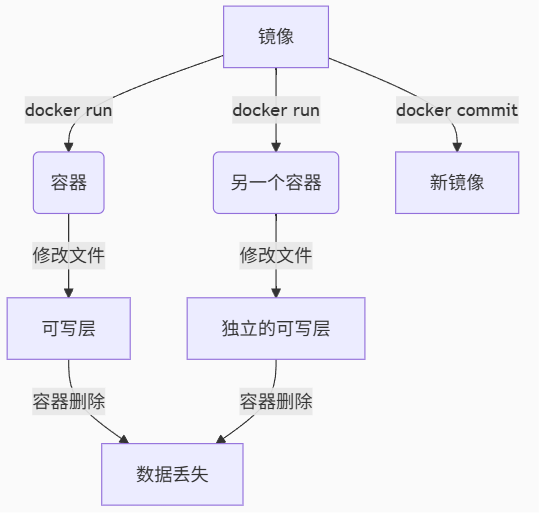
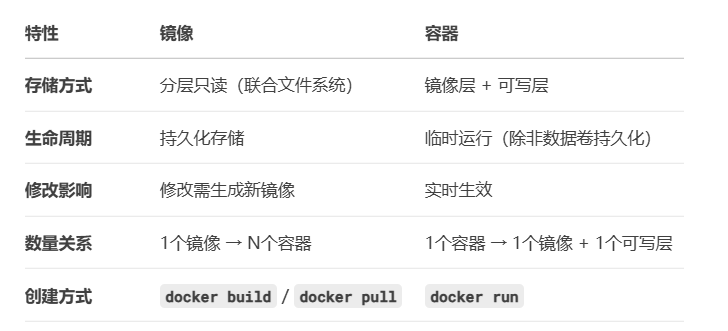
引言
镜像和容器的关系和区别
1. 验证宿主机安装了docker、nvidia-docker、显卡驱动
查看服务器上是否安装了docker
docker -v查看服务器上是否安装了nvidia-docker
dpkg -l | grep nvidia-docker查看服务器安装了显卡驱动
nvidia-smi2. 在docker的配置文件中配置镜像加速器
cd /etc/dockersudo vim daemon.json添加或修改以下内容:
{ \"registry-mirrors\": [ \"https://registry.docker-cn.com\", \"https://docker.mirrors.ustc.edu.cn\", \"https://hub-mirror.c.163.com\", \"https://mirror.baidubce.com\", \"https://docker.m.daocloud.io\", \"https://noohub.ru\", \"https://huecker.io\", \"https://dockerhub.timeweb.cloud\" ], \"runtimes\": { \"nvidia\": { \"args\": [], \"path\": \"/usr/bin/nvidia-container-runtime\" } }}然后重启 Docker 服务
sudo systemctl daemon-reloadsudo systemctl restart docker3. 构建docker镜像
3.1 手动拉取镜像
sudo docker pull [基础环境]sudo docker pull pytorch/pytorch:2.0.1-cuda11.7-cudnn8-runtime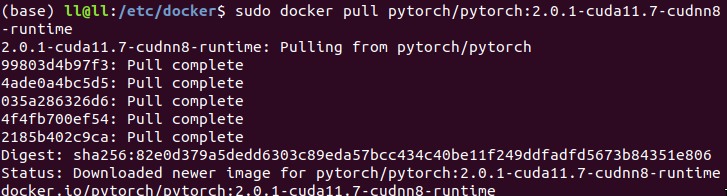
3.2 编辑Dockerfile
3.2.1 x86_64/AMD64 架构
博主使用的可用镜像配置(Dockerfile)如下:
# 基础环境(根据不同的宿主机架构修改)FROM pytorch/pytorch:2.0.1-cuda11.7-cudnn8-runtime# 安装基本工具(根据不同的宿主机架构修改)RUN apt-get update && \\ apt-get install -y --no-install-recommends \\ gcc git zip unzip wget curl vim htop libgl1 libglib2.0-0 libpython3-dev gnupg g++ libusb-1.0-0 libsm6 \\ && rm -rf /var/lib/apt/lists/*# 安装 X11 依赖(可视化)RUN apt-get update && apt-get install -y \\ x11-apps \\ libgl1-mesa-glx \\ libxcb-xinerama0 \\ && rm -rf /var/lib/apt/lists/*# 设置环境变量(可视化)ENV QT_QPA_PLATFORM=xcbENV QT_X11_NO_MITSHM=1# 设置工作目录(容器的根目录)WORKDIR /alian# 安装 pip 并更新到最新版本,同时配置使用阿里源RUN curl -sS https://bootstrap.pypa.io/get-pip.py | python3 \\ && pip config set global.index-url https://mirrors.aliyun.com/pypi/simple# 其他所需要的包RUN pip install flask scipy numpy matplotlib tqdm PyYAML Pillow opencv-python==4.10.0.84 open3d tensorboard h5py Seaborn ultralytics yolo \\ && rm -rf /var/lib/apt/lists/*若宿主机已经搭建好可用的yolov11的虚拟环境,则可以导出为requirements.txt
cd [本地项目]conda activate [虚拟环境名]pip freeze > requirements.txt在Dockerfile添加:
COPY requirements.txt .RUN pip install --no-cache-dir -r requirements.txt 3.2.2 linux/arm64/v8架构
# 查看指令uname -m
Dockerfile如下:
FROM nvcr.io/nvidia/l4t-pytorch:r35.2.1-pth2.0-py3# 安装系统依赖(确保换行符正确)RUN apt-get update && \\ apt-get install -y --no-install-recommends \\ libhdf5-dev libhdf5-serial-dev \\ gcc git zip unzip wget curl vim htop \\ libgl1 libglib2.0-0 libpython3-dev gnupg g++ \\ libusb-1.0-0 libsm6 \\ && rm -rf /var/lib/apt/lists/*# 安装 X11 依赖RUN apt-get update && apt-get install -y \\ x11-apps libgl1-mesa-glx libxcb-xinerama0 \\ && rm -rf /var/lib/apt/lists/*# 设置环境变量ENV QT_QPA_PLATFORM=xcbENV QT_X11_NO_MITSHM=1# 工作目录WORKDIR /home/nvidia# 配置阿里源并安装 Python 包RUN pip config set global.index-url https://mirrors.aliyun.com/pypi/simple \\ && pip install --no-cache-dir \\ flask scipy numpy matplotlib tqdm PyYAML Pillow \\ opencv-python==4.10.0.84 open3d tensorboard h5py==3.10.0 Seaborn \\ && pip install --no-cache-dir ultralytics yolo# 复制并安装项目依赖#COPY requirements.txt .#RUN pip install --no-cache-dir -r requirements.txt# 复制应用代码COPY . .3.3 构建 Docker 镜像
docker build -t [镜像名称] [Dockerfile所在的目录]docker build -t yolo11:v0 /media/ll/L/llr/a2023_my_3d/Arail_fusion
查看镜像
docker images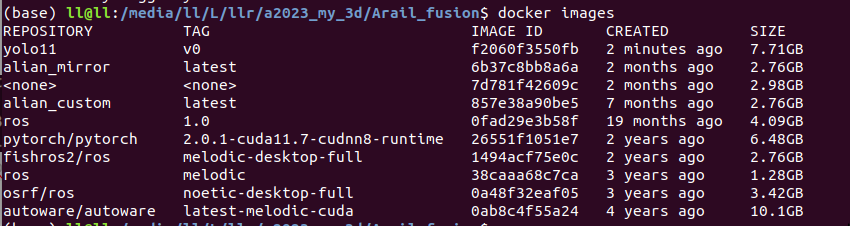
测试可视化
xhost +local:dockerdocker run --rm -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix yolo11:v0 xeyesxhost -local:docker
出现随鼠标移动的眼睛,则说明可视化成功!
4.运行docker容器
先启动容器,确保容器在运行,再进入容器
4.1 启动容器
docker run [选项] <镜像名> [命令]docker run -it <镜像名> /bin/bashdocker run -it --name [容器名] -v [宿主机目录]:[容器目录]-p 8000:80 [镜像名称:版本号] /bin/bash-i: 交互式操作
-t: 终端。
/bin/bash:放在镜像名后的是命令,希望有个交互式 Shell,因此用的是/bin/bash。
-d:指定容器在后台运行。
-v:将宿主机目录挂载到容器目录,注意:不能挂到容器的/tmp目录,不然进入容器运行apt-get update命令会报错,挂载到其他目录可以。
-p:后面的数字表示端口映射中主机端和容器端分别使用的端口,主机端口:容器端口。
–name:指定容器名字
–gpus all:表示将所有可用的 GPU 分配给容器。
–rm:表示容器退出后自动删除,一般用于查看镜像配置
docker run -it --name yolo11 yolo11:v0 /bin/bashdocker run -it --env=\"DISPLAY\" --env=\"QT_X11_NO_MITSHM=1\" --volume=\"/tmp/.X11-unix:/tmp/.X11-unix:rw\" --name yolo11 -v /media/ll/L/llr/a2023_my_3d/Arail_fusion:/alian/Arail_fusion -v/media/ll/0FE806A40FE806A41/DATASET/3D_data:/alian/3D_data -p 1111:1111 yolo11:v04.2 进入容器
docker exec -it [容器名] /bin/bash5.验证容器内的环境
在容器中运行下面代码alian_detect.py,终端成功输出并可视化则说明容器环境成功!
from ultralytics import YOLO # 加载预训练的YOLOv11n模型model = YOLO(r\"weights_yolo/yolo11n.pt\") # 对\'bus.jpg\'图像进行推理,并获取结果results = model.predict(r\"test_image/test1.jpg\", save=True, imgsz=640, conf=0.5) # 处理返回的结果for result in results: boxes = result.boxes # 获取边界框信息 result.show() # 显示结果6. Docker其他常用命令
# 1.退出容器exit # 2.查看运行中的容器docker ps # 3.查看所有容器docker ps -a # 4.开启已有的容器docker start <容器ID前3位> # 5.进入已存在的容器,利用exce命令时,需保证该容器是开启状态docker exec -it <容器ID前3位> /bin/bash # 6.删除容器,必须将容器停止后才能删除docker rm <容器ID前3位> # 7.依赖镜像的容器都删除完后,才能删除镜像docker rmi <镜像ID前3位> # 8.将容器导出为镜像docker export -o /path/to/output/file.tar <容器ID前3位> # 9.导入镜像快照docker import name.tar <镜像名称:版本号> # 10.将容器存为镜像docker commit <容器ID前3位> <镜像名称:版本号> # 11.将镜像导出保存为tar文件docker save -o <保存路径/*.tar> <镜像名称:版本号> # 12.导入镜像docker load -i <镜像文件*.tar> # 13.通过指定 URL 或者某个目录来导入docker import http://example.com/exampleimage.tgz example/imagerepo # 14.通过命令 docker commit 来提交容器副本(同命令10)docker commit -m=\"has update\" -a=\"runoob\" <容器ID前3位> runoob/ubuntu:v2#### -m提交更改信息, -a创建者名称 # 15.使用 docker tag 命令,为镜像添加一个新的标签。docker tag <镜像ID前3位> <镜像名>:新标签 # 16.从容器到宿主机,或从宿主机到容器的文件复制操作docker cp [OPTIONS] SRC_PATH CONTAINER:DEST_PATHdocker cp [OPTIONS] CONTAINER:SRC_PATH DEST_PATH7. 镜像与容器的指令对比

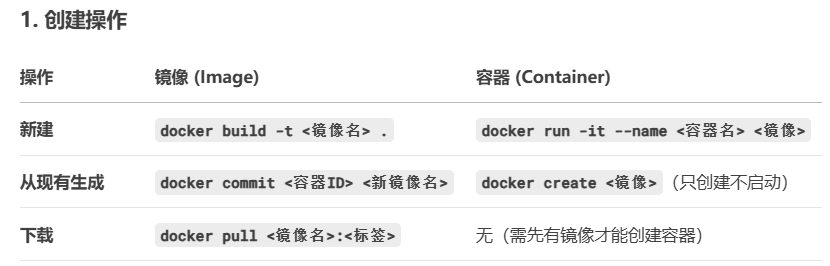
# 构建镜像(Dockerfile所在目录)docker build -t myapp:v1 .# 运行容器(基于镜像)docker run -d --name myapp_container myapp:v1
# 查看镜像列表docker images# 查看容器详情(包括IP、挂载卷等)docker inspect myapp_container
# 删除镜像(需先删除依赖容器)docker rmi myapp:v1# 删除已停止的容器docker rm myapp_container
# 停止并删除容器docker stop myapp_container && docker rm myapp_container
# 导出镜像docker save -o myapp.tar myapp:v1# 进入运行中的容器docker exec -it myapp_container bash8. 启动容器之后还能再挂在目录吗?
方案 1:提交容器为新镜像并重新运行
# 1. 停止原容器docker stop <容器名># 2. 将容器当前状态保存为新镜像docker commit <容器名> <新镜像名># 3. 重新运行容器并添加新挂载docker run -it \\ -v /host/data:/container/data \\ # 原挂载(需保留) -v /host/new_data:/container/new_data \\ # 新增挂载 <新镜像名>方案 2:临时文件复制(无需重建)
# 将主机文件复制到运行中的容器docker cp /host/new_data <容器名>:/container/new_data限制:复制是静态的,后续主机文件变更不会同步到容器内。
方案 3:使用 Docker Volume(推荐持久化场景)
# 1. 创建可管理的卷docker volume create my_volume# 2. 将卷挂载到运行中的容器(需停止后重新运行)docker run -it -v my_volume:/container/data <镜像名>生产环境建议
预先规划挂载:在 docker run 时声明所有需要的挂载
docker run -it \\ -v /host/config:/app/config \\ -v /host/logs:/app/logs \\ my_image使用 Docker Compose:通过配置文件管理复杂挂载
services: app: volumes: - \"./config:/app/config\" - \"./data:/app/data\"在主机修改文件后,手动同步到容器
rsync -avz /host/new_data/ $(docker inspect --format=\'{{.Id}}\' <容器名>):/container/new_data/

