GNSS拒止环境下无人机视觉地理定位汇总_leveraging map retrieval and alignment for robust
开源工作:
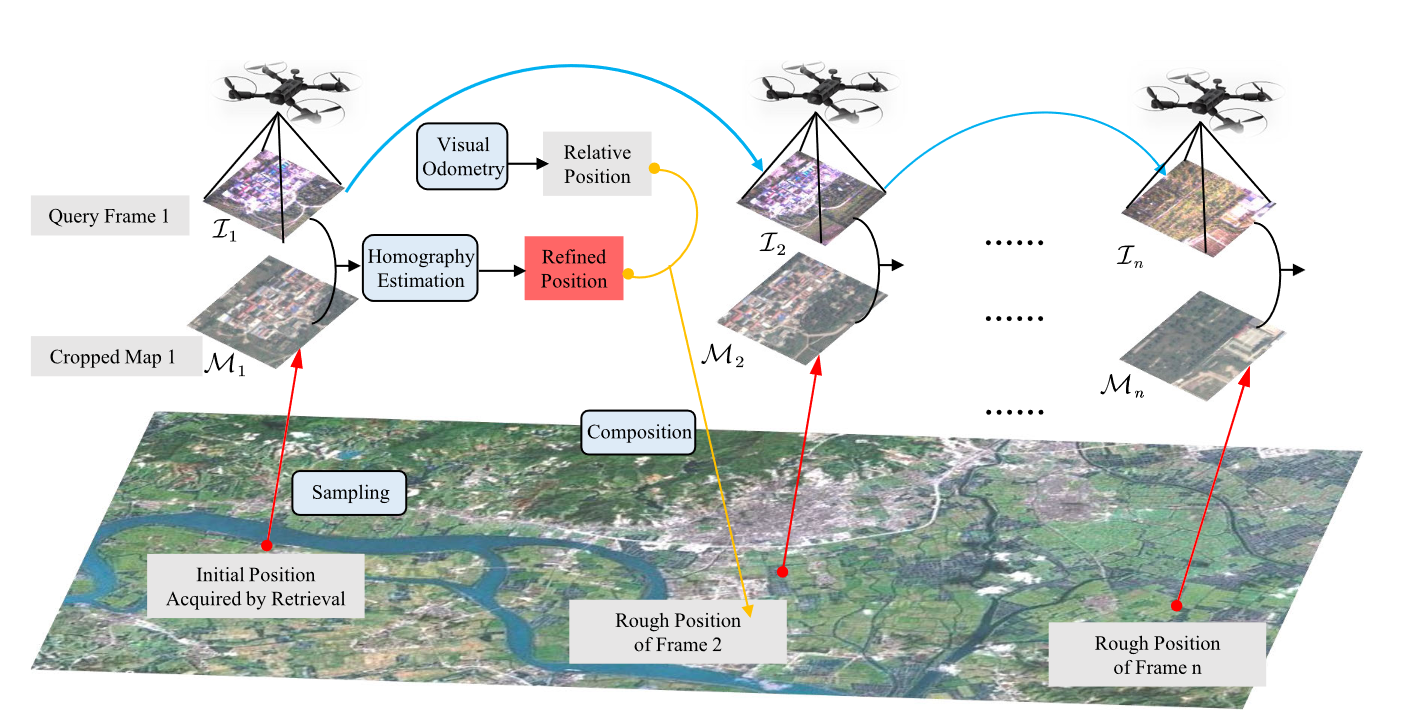
1. Leveraging Map Retrieval and Alignment for Robust UAV Visual Geo-Localization
paper:Leveraging Map Retrieval and Alignment for Robust UAV Visual Geo-Localization | IEEE Journals & Magazine | IEEE Xplore
code: GitHub - hmf21/UAVLocalization: Implementation of visual based UAV geo-localization using satellite imagery
2. A Visual Navigation Algorithm for UAV Based on Visual-Geography Optimization
code:GitHub - XuWeibo-code/UAV_Visual_Navigation: This is part of the code for visual navigation algorithms, which fuses VO with localization method based on heterogeneous image matching.
paper:A Visual Navigation Algorithm for UAV Based on Visual-Geography Optimization
与ORB-SLAM3结合,代码似乎没有完全开源
3. Jointly Optimized Global-Local Visual Localization of UAVs
code: GitHub - lihaoling/GLVL: This is a PyTorch implementation of the paper \"Jointly Optimized Global-Local Visual Localization of UAVs\".
paper: https://arxiv.org/pdf/2310.08082
4. Vision-Based UAV Self-Positioning in Low-Altitude Urban Environments
code:GitHub - Dmmm1997/DenseUAV: 「TIP」Vision-Based UAV Self-Positioning in Low-Altitude Urban Environments
paper:Vision-Based UAV Self-Positioning in Low-Altitude Urban Environments | IEEE Journals & Magazine | IEEE Xplore
5. Drone Referring Localization: An Efficient Heterogeneous Spatial Feature Interaction Method For UAV Self-Localization
code:GitHub - Dmmm1997/DRL: official repo of paper: Drone Referring Localization: An Efficient Heterogeneous Spatial Feature Interaction Method For UAV Self-Localization
paper:https://arxiv.org/pdf/2208.06561
6. Visual place recognition for aerial imagery: A survey
code: GitHub - prime-slam/aero-vloc: Framework for aerial imagery localization using different VPR systems
paper:https://arxiv.org/pdf/2406.00885
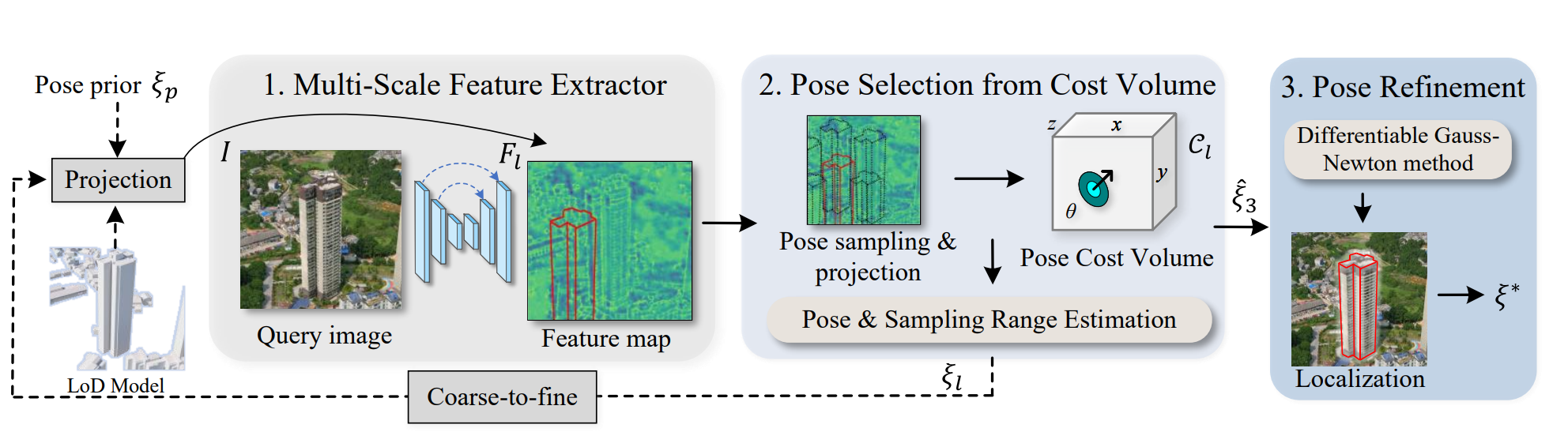
7. LoD-Loc_Aerial Visual Localization using LoD 3D Map with Neural Wireframe Alignment(NeurIPS)
code:GitHub - VictorZoo/LoD-Loc: This repository is an implementation of the paper \"LoD-Loc: Visual Localization using LoD 3D Map with Neural Wireframe Alignment\".
paper:[2410.12269] LoD-Loc: Aerial Visual Localization using LoD 3D Map with Neural Wireframe Alignment
8.The First Large-scale Benchmark for UAV Visual Localization under Low-altitude Multi-view Observation Condition
GitHub - UAV-AVL/Benchmark: UAV Visual Localization
论文:
数据集:
1.ALTO:貌似是一个比赛的数据集,看了一下测试集,基本全是绿色区域(村庄、草地、山)挑战性应该挺大
https://github.com/MetaSLAM/ALTO.git


