STM32 SPI从机模式编程与实践
本文还有配套的精品资源,点击获取 
简介:SPI(Serial Peripheral Interface)是一种用于微控制器与外围设备间通信的同步串行接口。在SPI从机模式下,STM32微控制器作为接收端,由主设备控制数据传输。本文详细介绍了SPI从机的基本原理、STM32的SPI配置、从机模式设置、数据传输、中断处理、串口通信及代码实现。通过在ministm32开发板上编写初始化函数和处理中断的回调函数,STM32能够作为从设备接收数据,并确保数据传输的正确性与完整性,进一步与其他功能结合实现数据可视化和分析。 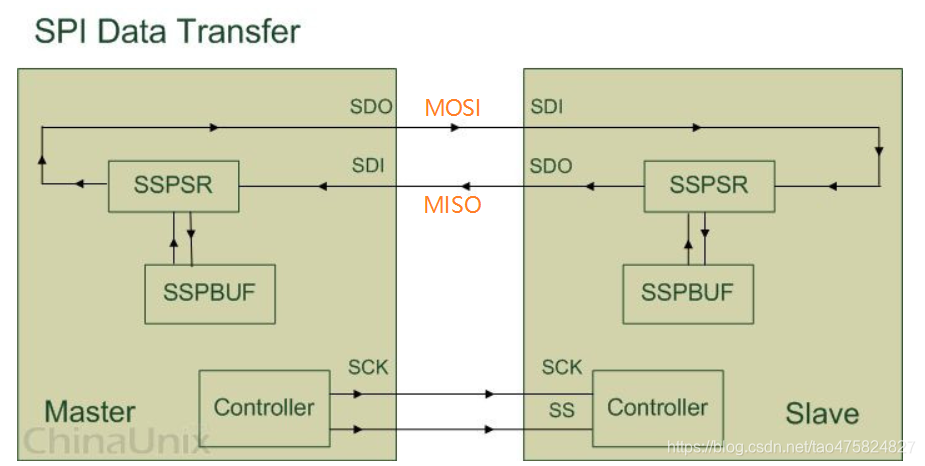
1. SPI基本原理和信号线
SPI简介
串行外设接口(SPI)是一种高速全双工串行通信接口。它允许微控制器与各种外围设备以串行方式通信。SPI通信通常涉及一个主设备(master)和一个或多个从设备(slave)。
SPI信号线
SPI总线使用四条线进行数据传输: - SCLK(Serial Clock) : 主设备提供的时钟信号线。 - MOSI(Master Out Slave In) : 主设备发送数据到从设备。 - MISO(Master In Slave Out) : 从设备发送数据到主设备。 - SS(Slave Select) : 也称为片选线,用于使从设备进入激活状态。
SPI通信原理
SPI通信时,主设备会通过SS线选择一个从设备,然后通过SCLK线提供同步时钟信号。在每个时钟边沿(上升沿或下降沿),数据在MOSI和MISO上进行单向或双向传输。主设备和从设备必须在开始通信前确定时钟极性和相位,以确保数据的正确接收和发送。
2. STM32 SPI配置和GPIO连接
2.1 STM32 SPI初始化配置
2.1.1 SPI时钟使能和参数设置
在STM32微控制器中,SPI模块的初始化配置是实现SPI通信的第一步。为了使能SPI模块,我们需要通过RCC(Reset and Clock Control)来开启对应的SPI时钟。这通常通过调用RCC的函数来完成,例如 RCC_APB1PeriphClockCmd() 。一旦时钟使能,我们可以配置SPI的各种参数,包括数据传输格式、时钟极性、相位、主从模式以及波特率等。
// 使能SPI2的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);// SPI配置参数结构体初始化SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 全双工模式SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 主模式SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 数据大小为8位SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 时钟极性,CPOL = 0SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 时钟相位,第一个边沿采样SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // 软件控制NSS信号SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; // 波特率预分频SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 数据传输从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC多项式值,默认即可// 根据上述参数初始化SPISPI_Init(SPI2, &SPI_InitStructure);在上述代码中,我们设置了SPI的多项参数,包括其工作模式、数据格式、时钟极性和相位等。这些参数对于确保SPI通信的正确和稳定至关重要。参数设置完成后,我们还需要使能SPI接口。
2.1.2 SPI工作模式选择与配置
STM32支持三种SPI工作模式:主模式、从模式和双向模式。在主模式中,微控制器控制整个SPI通信,提供时钟信号和其他信号线的管理。在从模式中,微控制器则接收外部设备的时钟信号,并且被动地响应数据传输请求。双向模式允许设备进行发送和接收数据,但这种模式不常用,并且在很多应用场景中并不适用。
工作模式的选择依据实际应用需求而定。例如,如果你的设备需要控制多个从设备,那么应该选择主模式;如果你的设备是一个传感器或其他简单的外围设备,则应选择从模式。配置工作模式通常涉及修改SPI的控制寄存器,例如 SPI_InitStructure.SPI_Mode 字段。确保模式选择与硬件连接相匹配,以避免通信错误。
2.2 GPIO连接与初始化
2.2.1 GPIO时钟使能与模式设置
通用输入输出端口(GPIO)是STM32与外部设备通信的重要接口。在SPI通信中,我们需要将GPIO配置为复用功能,以支持SPI的SCK、MISO和MOSI信号线。此外,GPIO还需要配置为推挽输出或开漏输出,这取决于外围设备的要求。
为了使用GPIO,我们首先需要通过RCC使能GPIO端口的时钟。之后,我们可以配置GPIO的模式和输出类型。例如,使用STM32标准库函数配置GPIO:
// 使能GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;// 配置SPI2的SCK为复用推挽模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);// 配置SPI2的MISO为浮空输入模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOB, &GPIO_InitStructure);// 配置SPI2的MOSI为复用推挽模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_Init(GPIOB, &GPIO_InitStructure);在上面的代码中,我们分别配置了SPI的三个引脚(SCK、MISO、MOSI)为复用推挽模式和浮空输入模式。这样设置之后,这些引脚就可以用于SPI通信了。
2.2.2 SPI通信引脚的连接方式
SPI通信引脚的连接方式在硬件层面也非常重要。通常,主设备会连接到多个从设备,因此需要确保从设备的NSS(片选)信号线正确配置,以实现设备间的选通。通常情况下,主设备会有一个专门的GPIO输出用于控制NSS信号,而从设备的NSS脚通常是输入。
在物理连接时,对于主设备:
- SCK(时钟线)连接到所有从设备的SCK。
- MOSI(主设备输出,从设备输入)连接到所有从设备的MOSI。
- MISO(主设备输入,从设备输出)连接到所有从设备的MISO。
- NSS(片选)连接到所有从设备的NSS。
对于从设备:
- SCK连接到主设备的SCK。
- MISO连接到主设备的MOSI。
- MOSI连接到主设备的MISO。
- NSS连接到主设备的NSS。
下面是一个简单的表格,展示了SPI通信引脚的连接方式:
| 引脚类型 | 主设备引脚连接 | 从设备引脚连接 | |----------|----------------|----------------| | SCK | 连接到所有从设备的SCK | 连接到主设备的SCK | | MOSI | 连接到所有从设备的MOSI | 连接到主设备的MISO | | MISO | 连接到所有从设备的MISO | 连接到主设备的MOSI | | NSS | 控制片选信号 | 连接到主设备的NSS |
确保硬件连接正确后,SPI通信的基础硬件部分就配置完成了。此时,我们就可以开始着手软件层面的开发,包括SPI初始化、数据传输和中断处理等。
3. SPI从机模式设置和工作模式配置
3.1 SPI从机模式的启用与配置
3.1.1 SPI从机模式的启用方法
启用SPI从机模式是实现SPI通信的第一步。在STM32微控制器中,启用SPI从机模式需要正确配置SPI的相关参数。这包括对SPI控制寄存器(例如,SPI_CR1)中的SSM(软件从模式管理)和SSE(软件从模式使能)位进行配置。具体步骤如下:
- 使能SPI时钟。在STM32中,要使用SPI模块,首先必须使能其时钟。这通常通过RCC(Reset and Clock Control)模块来完成,例如:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);- 初始化SPI。配置SPI控制寄存器来设置从机模式。例如:
SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;// 其他参数配置...SPI_Init(SPI1, &SPI_InitStructure); 在以上代码中, SPI_Mode_Slave 标志位的设置表明该SPI接口将作为从机工作。
- 配置GPIO引脚。在从机模式下,通常需要配置一个GPIO引脚作为片选(SS)信号输入,以便主设备可以通过这个引脚来选择特定的从设备。
GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; // 假设SS引脚连接到PA4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 输入上拉模式GPIO_Init(GPIOA, &GPIO_InitStructure);3.1.2 SPI通信速率和时钟极性配置
在从机模式下,必须确保SPI从设备的通信速率和时钟极性与主机相匹配,以保证数据的正确收发。这通常涉及到以下参数的配置:
- 通信速率(Baud Rate) :通信速率决定了数据在SPI总线上传输的速率。在STM32中,可以通过设置SPI的Baud Rate Prescaler(BR)位来调整速率。
- 时钟极性(CPOL) :这个参数决定了SPI总线上的空闲时钟电平是高还是低。在STM32中,通过SPI时钟极性控制位(CPOL)来配置。
- 时钟相位(CPHA) :这个参数决定了数据是在时钟的第一个边沿上采样还是在第二个边沿上采样。在STM32中,通过SPI时钟相位控制位(CPHA)来配置。
配置示例如下:
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;SPI_InitStructure.SPI_CRCPolynomial = 7;SPI_Init(SPI1, &SPI_InitStructure);3.2 SPI工作模式的详细设置
3.2.1 主从模式下的不同配置需求
在SPI通信中,主设备通常负责产生时钟信号,并且控制数据流的开始和结束。而从设备则需要准备好接收和发送数据,等待主设备的信号。在STM32中,根据通信需求的不同,可以选择不同的工作模式:
- 全双工模式 :在这种模式下,SPI允许同时进行数据的发送和接收。这是最常用的通信模式。
- 接收-only模式 :在这种模式下,SPI设备只能接收数据,不能发送数据。这适用于某些传感器设备,它们只需要将数据发送给主设备。
- 发送-only模式 :这种模式很少使用,因为它不支持数据的接收,可能会导致通信错误。
在配置SPI工作模式时,需要特别注意以下几点:
- 为从设备选择合适的模式。例如,如果从设备只需要发送数据,则应该配置为主发送从接收模式。
- 确保所有设备的通信速率和时钟极性相匹配。主从设备之间任何不一致都可能导致数据通信失败。
3.2.2 不同通信场景下的工作模式选择
根据不同的应用场景,选择合适的工作模式是至关重要的。下面给出一些典型的通信场景以及对应的工作模式选择建议:
-
传感器数据采集 :许多传感器作为从设备,仅需要将数据发送到主设备。这种场景下,主设备使用主发送从接收模式,从设备使用发送-only模式。
-
通用数据交换 :例如,当一个主设备需要与多个从设备进行通信时,通常主设备使用全双工模式,而从设备则根据需要选择接收-only模式或全双工模式。
-
设备间同步 :在需要多个从设备同步工作的场景中,可能需要配置一个特殊的从设备作为同步信号的源,这样其他设备就可以在接收数据的同时,通过这个信号来调整自己的时序。
为了在这些场景中选择正确的模式,可能需要分析通信协议,设计合适的时序逻辑,并且根据实际的硬件连接情况来配置SPI的参数。在STM32中,这些配置可以通过修改SPI的控制寄存器来实现。
在接下来的章节中,我们将探讨如何在实际项目中应用这些配置,以及如何优化和调试STM32的SPI从机代码来提高系统的稳定性和性能。
4. SPI数据传输流程
4.1 SPI数据发送和接收过程
在深入探讨SPI数据传输流程之前,理解SPI通信协议中数据帧的格式至关重要。SPI协议以字节为单位进行数据交换,每个字节可以是8位,每个位的传输都对应一个时钟周期。
4.1.1 数据帧格式和通信协议
数据帧通常由起始位、数据位、可选的奇偶校验位和停止位组成。在SPI通信中,数据帧的格式更为简单,主要由起始信号、数据位和终止信号组成。通信协议通常由以下几个部分组成:
- 起始信号 :由主设备产生,标志一次数据传输的开始。
- 数据位 :数据位是传输的主要部分,按照配置的位宽(通常是8位或16位)进行传输。
- 终止信号 :由主设备产生,标志一次数据传输的结束。
数据传输可以是全双工的,即数据可以在同一时刻进行发送和接收。
4.1.2 发送数据的步骤和注意事项
- 初始化SPI接口 :确保SPI接口已正确配置,包括时钟速率、数据大小、时钟极性和相位等参数。
- 片选信号控制 :在发送数据前,需要将从设备的片选(CS)信号置为低电平,以确保从设备处于选中状态。
- 数据帧准备 :准备好要发送的数据帧,如果使用DMA(Direct Memory Access),需要设置好相应的缓冲区。
- 数据发送 :通过SPI接口将数据帧发送给从设备。如果是全双工模式,主设备发送数据的同时也可以接收数据。
- 片选信号恢复 :数据发送完毕后,将片选信号恢复为高电平,释放从设备,以便于下次通信。
注意事项:
- 需要确保SPI的时钟速率、极性和相位与从设备相匹配。
- 在数据发送期间,保持稳定的时钟信号是必须的。
- 在多从设备环境中,正确管理片选信号至关重要,以避免多个设备同时响应造成数据冲突。
- 为了保证数据传输的可靠性,务必在发送数据时检查SPI状态寄存器,确保没有错误发生。
// 以下是SPI数据发送的伪代码void SPI_SendData(uint8_t *data, uint16_t size) { // 确保数据指针和大小有效 if (data == NULL || size == 0) return; // 选中从设备 HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_RESET); // 发送数据 for (uint16_t i = 0; i < size; ++i) { uint8_t received_data = SPI_TransmitReceiveByte(data[i]); // 这里可以根据实际需要处理接收到的数据 } // 取消选中从设备 HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);}uint8_t SPI_TransmitReceiveByte(uint8_t byte) { // 这里使用HAL库函数HAL_SPI_TransmitReceive来发送和接收一个字节的数据 uint8_t received_data; HAL_SPI_TransmitReceive(&hspi1, &byte, &received_data, 1, HAL_MAX_DELAY); return received_data;} 上述代码展示了基本的数据发送和接收过程。 HAL_GPIO_WritePin 用于控制片选信号,而 HAL_SPI_TransmitReceive 则是实际发送数据并接收响应的函数。在实际应用中,根据具体硬件平台和SPI库的不同,发送和接收数据的方法可能略有差异。
4.2 SPI数据缓冲和管理
在数据量较大的情况下,单纯依赖CPU进行数据的发送和接收是不现实的。此时,双缓冲技术和缓冲区管理策略显得尤为重要。
4.2.1 双缓冲技术的使用
双缓冲技术允许一个缓冲区用于数据的接收,而另一个缓冲区用于CPU处理,这样可以最大程度地减少因数据交换导致的CPU等待时间。在SPI通信中,双缓冲技术可以通过DMA来实现,这样数据的发送和接收可以由DMA控制,而CPU可以同时进行其他任务。
// 双缓冲示例代码uint8_t buffer1[SPI_BUFFER_SIZE];uint8_t buffer2[SPI_BUFFER_SIZE];void DMA_SPI_Receive(void) { // DMA接收完成的回调函数 if (DMA_GetITStatus(DMA1_IT_TC3) != RESET) { DMA_ClearITPendingBit(DMA1_IT_TC3); // 处理buffer1中的数据 ProcessData(buffer1, SPI_BUFFER_SIZE); // 准备接收下一批数据到buffer2 DMA_SetCurrDataCounter(DMA1_Channel3, SPI_BUFFER_SIZE); }}void DMA_SPI_Send(void) { // DMA发送完成的回调函数 if (DMA_GetITStatus(DMA1_IT_TC2) != RESET) { DMA_ClearITPendingBit(DMA1_IT_TC2); // 准备发送下一批数据到SPI DMA_SetCurrDataCounter(DMA1_Channel2, SPI_BUFFER_SIZE); }}在上述代码中,通过两个DMA通道分别进行数据的接收和发送操作。当一个缓冲区的数据接收完成后,通过中断服务程序切换到另一个缓冲区继续接收数据,并处理当前缓冲区的数据。
4.2.2 数据缓冲区的管理策略
管理策略应考虑以下几个方面:
- 循环缓冲 :当缓冲区满时,新的数据应覆盖旧的数据。
- 顺序处理 :确保数据按照接收顺序进行处理。
- 缓冲区大小 :根据应用需求选择合适的缓冲区大小,避免数据丢失。
- 缓冲区交换 :实现缓冲区交换机制,当一个缓冲区满时自动切换到另一个空缓冲区。
- 错误处理 :当缓冲区读写出错时,应有相应的错误处理机制。
// 示例代码展示一个简单的缓冲区管理策略typedef struct { uint8_t *buffer; uint16_t head; uint16_t tail; uint16_t size; uint16_t count;} CircularBuffer;void CircularBuffer_Init(CircularBuffer *cb, uint8_t *buffer, uint16_t size) { cb->buffer = buffer; cb->head = 0; cb->tail = 0; cb->size = size; cb->count = 0;}uint8_t CircularBuffer_Put(CircularBuffer *cb, uint8_t data) { if (cb->count == cb->size) { return 0; // 缓冲区满 } cb->buffer[cb->tail] = data; cb->tail = (cb->tail + 1) % cb->size; cb->count++; return 1;}uint8_t CircularBuffer_Get(CircularBuffer *cb) { if (cb->count == 0) { return 0xFF; // 缓冲区空 } uint8_t data = cb->buffer[cb->head]; cb->head = (cb->head + 1) % cb->size; cb->count--; return data;}以上代码定义了一个循环缓冲区的结构体,并提供了初始化和数据入队、出队的函数。使用循环缓冲区结构体可以有效地管理数据流,并确保数据不会因缓冲区满而丢失。
本章节介绍了SPI数据传输的流程,从数据帧格式到发送接收步骤,再到缓冲区管理技术的深入解析。通过代码的示例和流程图,详细阐述了双缓冲技术的实现和数据缓冲区的管理策略。这样的结构和内容安排,旨在为读者提供一个清晰的学习路径,确保即使是对SPI协议有一定了解的读者也能从中获取更深层次的知识。
5. SPI中断处理实现
在基于STM32微控制器的SPI通信中,中断处理是一种常见的数据处理方式,它可以使得主控制器在数据准备就绪时得到及时的响应,并采取相应的处理措施。本章将深入探讨SPI中断处理机制的工作原理,并详细解析实际中断处理流程。
5.1 SPI中断机制的工作原理
SPI中断处理是基于STM32的嵌入式系统设计中一个重要的环节。通过合理的中断管理,能够提升系统对外部事件的响应能力,提高数据处理的实时性和效率。
5.1.1 中断源的识别和优先级配置
STM32的中断源主要包括通信中断、错误中断以及DMA(直接内存访问)中断。在SPI模块中,主要关注的是与数据传输相关的通信中断,比如接收缓冲区非空中断(RXNE)和发送缓冲区空中断(TXE)。
配置中断时,需要设置SPI的中断优先级,这关系到在多中断源同时触发时的处理顺序。STM32的中断优先级配置是通过NVIC(嵌套向量中断控制器)来实现的。开发者可以通过设置 NVIC_SetPriority() 函数来设置SPI中断的优先级。
void SPIx_IRQHandler(void) { // SPI中断处理函数的框架 if (SPI_I2S_GetITStatus(SPIx, SPI_I2S_IT_RXNE) != RESET) { // 接收数据处理 } if (SPI_I2S_GetITStatus(SPIx, SPI_I2S_IT_TXE) != RESET) { // 发送数据处理 } // 处理其他中断...}5.1.2 中断服务程序的编写要点
在编写SPI中断服务程序时,关键点在于确保数据的接收和发送操作能够在中断服务程序中被正确处理。同时,应考虑避免在中断服务程序中执行过于复杂或者耗时的操作,以免影响系统的响应性能。
中断服务程序通常会检查中断标志位,确认是哪种中断被触发,并执行相应的处理逻辑。如数据接收完成时,需读取SPI的数据寄存器,并清除中断标志位以准备下一次数据接收。
5.2 实际中断处理流程详解
在实际应用中,SPI中断处理流程需要针对具体的数据处理需求进行设计。下面将详细介绍数据接收完成的中断处理以及错误情况下的中断响应和处理。
5.2.1 数据接收完成的中断处理
当SPI接收到数据后,会触发接收完成中断,此时中断服务程序会被调用。在接收中断处理程序中,通常需要读取接收到的数据,并对其进行必要的处理。
void SPIx_IRQHandler(void) { // SPI中断处理函数的框架 if (SPI_I2S_GetITStatus(SPIx, SPI_I2S_IT_RXNE) != RESET) { // 读取接收到的数据 uint16_t receivedData = SPI_I2S_ReceiveData(SPIx); // 处理接收到的数据 processData(receivedData); // 清除中断标志位 SPI_I2S_ClearITPendingBit(SPIx, SPI_I2S_IT_RXNE); } // 处理其他中断...}5.2.2 错误情况下的中断响应和处理
在SPI通信过程中,可能会发生各种错误,如溢出错误、帧格式错误等。在这些情况下,SPI模块同样会触发中断,提示主控制器进行错误处理。
void SPIx_IRQHandler(void) { // SPI中断处理函数的框架 if (SPI_I2S_GetITStatus(SPIx, SPI_I2S_IT_ERR) != RESET) { // 读取状态寄存器中的错误标志 uint16_t status = SPI_I2S_GetITStatus(SPIx, SPI_I2S_IT_ERR); // 根据错误类型进行相应的处理 if (status & SPI_I2S_FLAG_OVR) { // 处理溢出错误 handleOverrunError(); } // 清除错误标志位 SPI_I2S_ClearITPendingBit(SPIx, SPI_I2S_IT_ERR); } // 处理其他中断...}SPI中断处理机制的设计是实现SPI高效通信的关键环节。通过合理地配置中断源和编写中断服务程序,可以确保系统在数据接收和错误处理方面具有良好的性能表现。同时,开发者还应定期检查和测试中断处理程序,保证其在各种情况下都能稳定工作。
6. 串口通信配合SPI使用
在数据通信领域,串口通信和SPI是两种常见的通信协议。串口通信因其简单性和易用性被广泛应用于各种设备之间的通信。而SPI作为一种高速同步串行通信协议,在高性能嵌入式系统中得到了广泛应用。本章节将探讨如何将串口通信与SPI配合使用,以实现更加灵活和强大的数据传输解决方案。
6.1 串口通信在SPI中的作用
串口通信虽然在速度上不及SPI,但其简单和通用性使其成为调试和配置SPI设备的理想选择。在许多应用场景中,串口被用作主控制器与SPI设备之间的辅助通信通道。
6.1.1 串口用于SPI通信的初始化配置
首先,串口通信需要被初始化以与SPI设备进行数据交换。这包括设置波特率、数据位、停止位和校验位等参数。以STM32为例,配置串口(如USART1)的步骤如下:
void USART1_Init(void) { // 使能GPIOA和USART1时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE); // 配置USART1 Tx (PA.09) 为复用推挽输出 GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); // 配置USART1 Rx (PA.10) 为浮空输入 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); // USART1初始化设置 USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); // 使能USART1 USART_Cmd(USART1, ENABLE);}6.1.2 串口命令与SPI命令的交互机制
在SPI设备的初始化过程中,往往需要通过串口发送特定的配置命令来设置SPI的工作模式、速率等参数。SPI设备在接收到这些命令后,会相应地调整自己的工作状态。交互机制如下:
- 主控制器通过串口发送配置命令。
- SPI设备接收到命令并解析,根据命令内容配置SPI接口。
- SPI设备通过串口发送确认信息,表示配置成功或失败。
例如,使用串口发送SPI速率配置命令的示例代码如下:
void Set_SPI_Speed(uint32_t speed) { char command[10]; sprintf(command, \"SPISPEED %lu\", speed); USART_SendString(USART1, command); // 接收SPI设备的响应,并处理 ...}6.2 串口与SPI的协同工作实例
为了展示串口与SPI如何协同工作,下面通过一个实例来说明在实际应用中如何实现二者的同步。
6.2.1 串口命令接收与SPI数据发送的同步
在该示例中,主控制器通过串口接收用户命令,然后根据命令内容控制SPI数据的发送。以下是一个简单的同步实现示例代码:
int main(void) { USART1_Init(); // SPI初始化代码省略 char rx_buffer[100]; while (1) { // 接收串口命令 USART_ClearFlag(USART1, USART_FLAG_RXNE); USART_SendString(USART1, \"Enter command: \"); int len = USART_ReceiveString(USART1, rx_buffer, sizeof(rx_buffer)); // 解析命令并执行相应操作 if (strcmp(rx_buffer, \"SEND DATA\") == 0) { // 发送SPI数据的代码省略 USART_SendString(USART1, \"Data sent over SPI\\n\"); } // 清空接收缓冲区 memset(rx_buffer, 0, sizeof(rx_buffer)); }}6.2.2 SPI数据接收与串口数据反馈的同步
在数据接收方面,当SPI设备接收到数据后,可以通过串口反馈给主控制器,这样主控制器就可以知道SPI通信的状态,并做出相应的处理。
void SPI1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { // 处理串口接收到的数据 ... } if(SPI_GetITStatus(SPI1, SPI_IT_RXNE) != RESET) { // 读取SPI接收到的数据 uint16_t received_data = SPI_ReceiveData(SPI1); // 通过串口反馈数据 char buffer[10]; sprintf(buffer, \"Data received: %d\\n\", received_data); USART_SendString(USART1, buffer); }}通过上述章节内容的阐述,我们可以看到,虽然SPI与串口各有优势,但通过合理的配置和程序设计,二者能够互补,共同为嵌入式系统提供更为高效、灵活的通信解决方案。在实际应用中,开发者需要仔细考虑如何根据具体需求和场景,合理地配置和使用串口和SPI通信。
本文还有配套的精品资源,点击获取
简介:SPI(Serial Peripheral Interface)是一种用于微控制器与外围设备间通信的同步串行接口。在SPI从机模式下,STM32微控制器作为接收端,由主设备控制数据传输。本文详细介绍了SPI从机的基本原理、STM32的SPI配置、从机模式设置、数据传输、中断处理、串口通信及代码实现。通过在ministm32开发板上编写初始化函数和处理中断的回调函数,STM32能够作为从设备接收数据,并确保数据传输的正确性与完整性,进一步与其他功能结合实现数据可视化和分析。
本文还有配套的精品资源,点击获取


