【愚公系列】《MIoT.VC》004-掌握机器人的仿真操作(机器人使用真空吸盘拾取,搬运物料的编程操作)

💎【行业认证·权威头衔】
✔ 华为云天团核心成员:特约编辑/云享专家/开发者专家/产品云测专家
✔ 开发者社区全满贯:CSDN博客&商业化双料专家/阿里云签约作者/腾讯云内容共创官/掘金&亚马逊&51CTO顶级博主
✔ 技术生态共建先锋:横跨鸿蒙、云计算、AI等前沿领域的技术布道者
🏆【荣誉殿堂】
🎖 连续三年蝉联\"华为云十佳博主\"(2022-2024)
🎖 双冠加冕CSDN\"年度博客之星TOP2\"(2022&2023)
🎖 十余个技术社区年度杰出贡献奖得主
📚【知识宝库】
覆盖全栈技术矩阵:
◾ 编程语言:.NET/Java/Python/Go/Node…
◾ 移动生态:HarmonyOS/iOS/Android/小程序
◾ 前沿领域:物联网/网络安全/大数据/AI/元宇宙
◾ 游戏开发:Unity3D引擎深度解析
文章目录
🚀前言
机器人使用真空吸盘进行拾取和搬运物料是工业自动化中的常见任务(如包装、上下料、装配等)。其编程操作需要综合考虑硬件配置、物料特性、运动路径、信号交互和异常处理。
🚀一、机器人使用真空吸盘拾取,搬运物料的编程操作
🔎1.场景概述
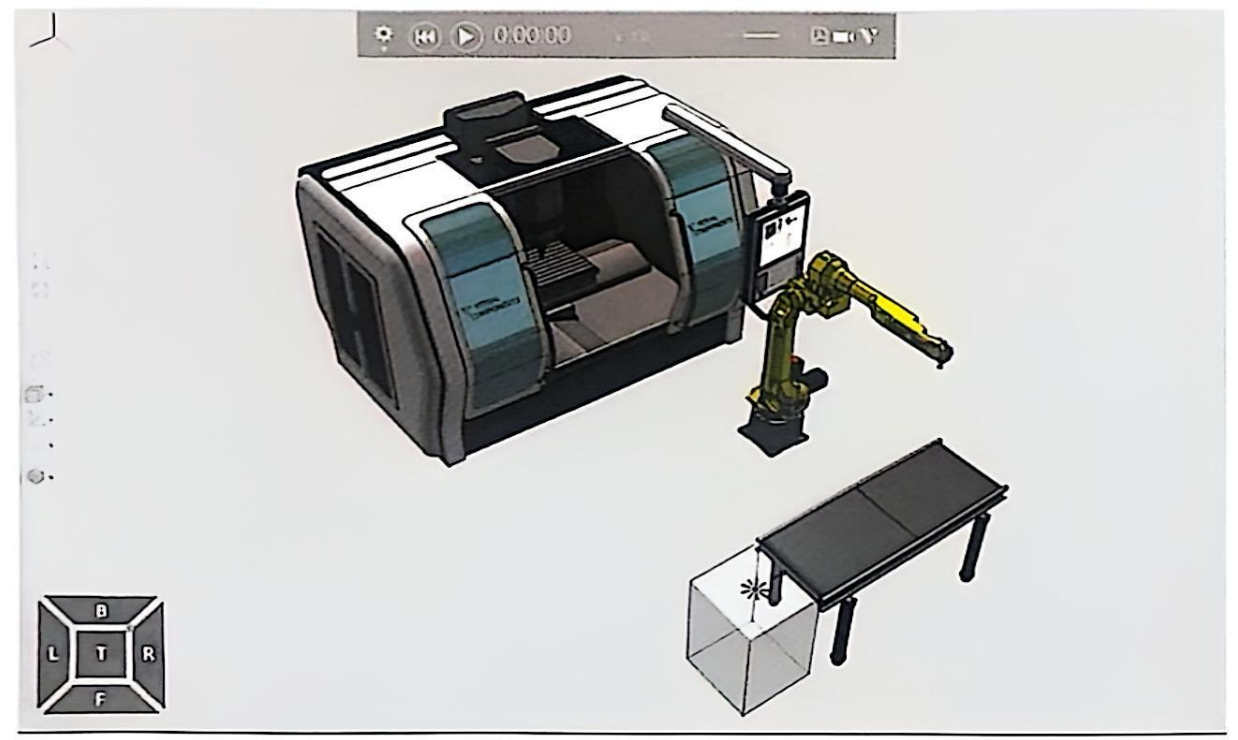
图所示为机器人使用真空吸盘拾取、搬运物料场景。在场景中机器人使用吸盘吸取传送带上的物料,将其放至机床内进行加工。
🔎2.组件列表
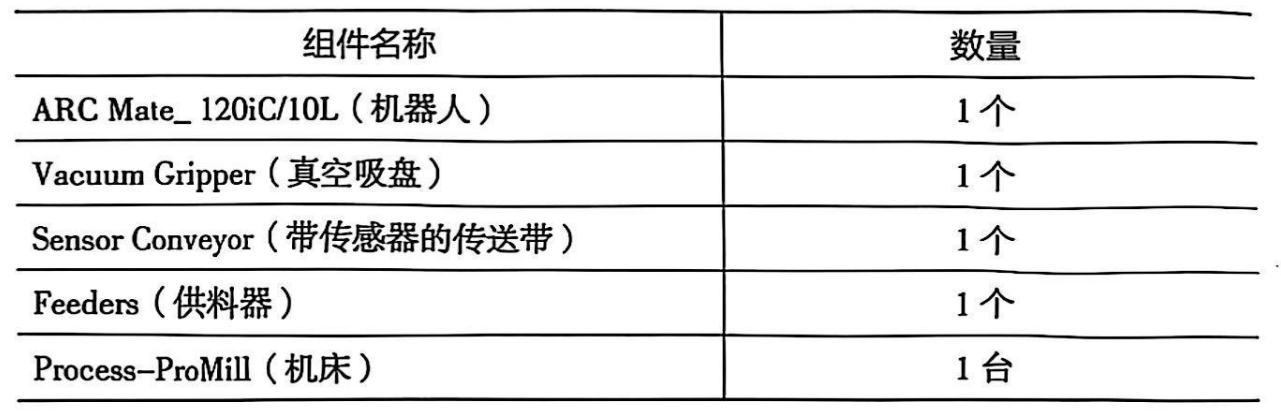
机器人使用真空吸盘拾取、搬运物料场景组件列表,见表。
🔎3.场景搭建
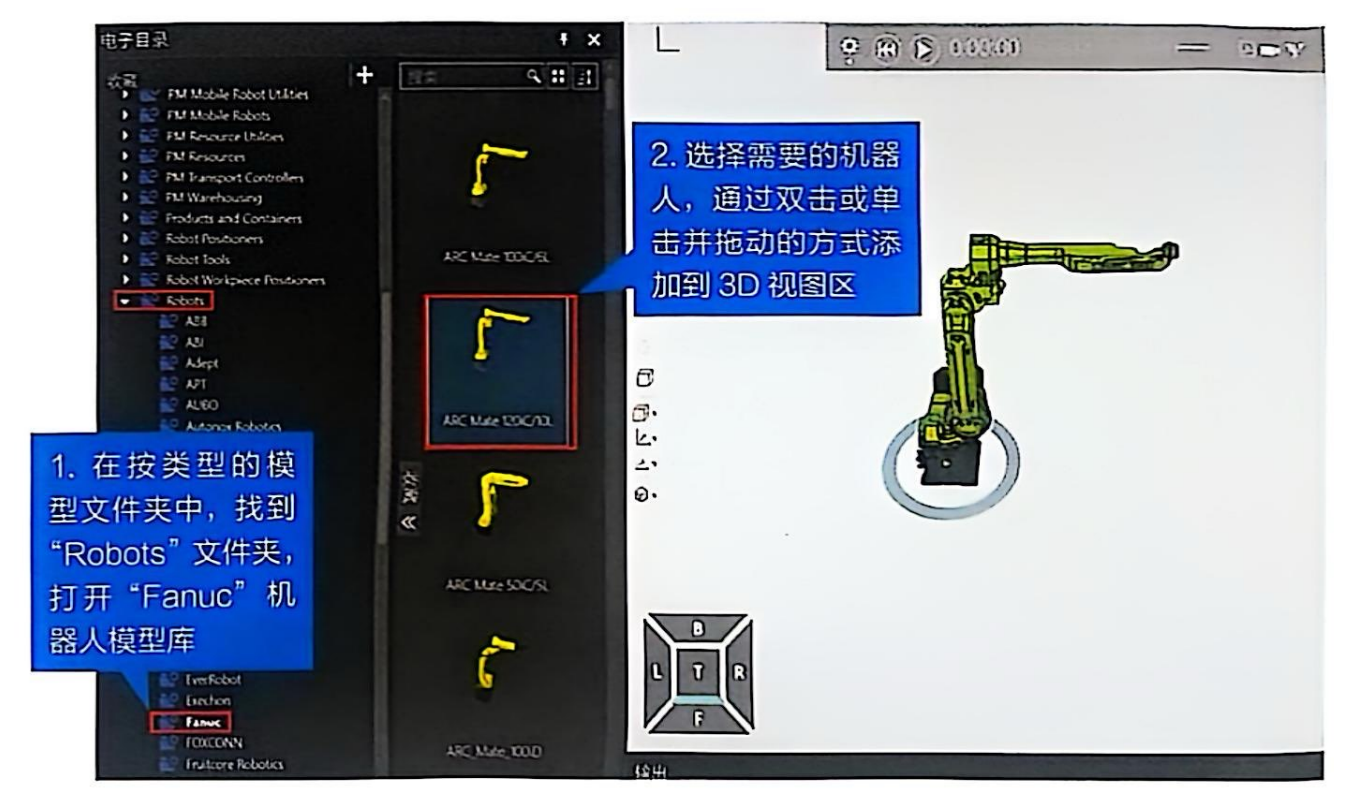
选择“电子目录”面板中“按类型的模型”选项,找到“Robots文件夹,展开“Robots”文件夹,双击“Fanuc”机器人模型库,如图所示。单击并拖动所需要的组件至 3D 视图区。
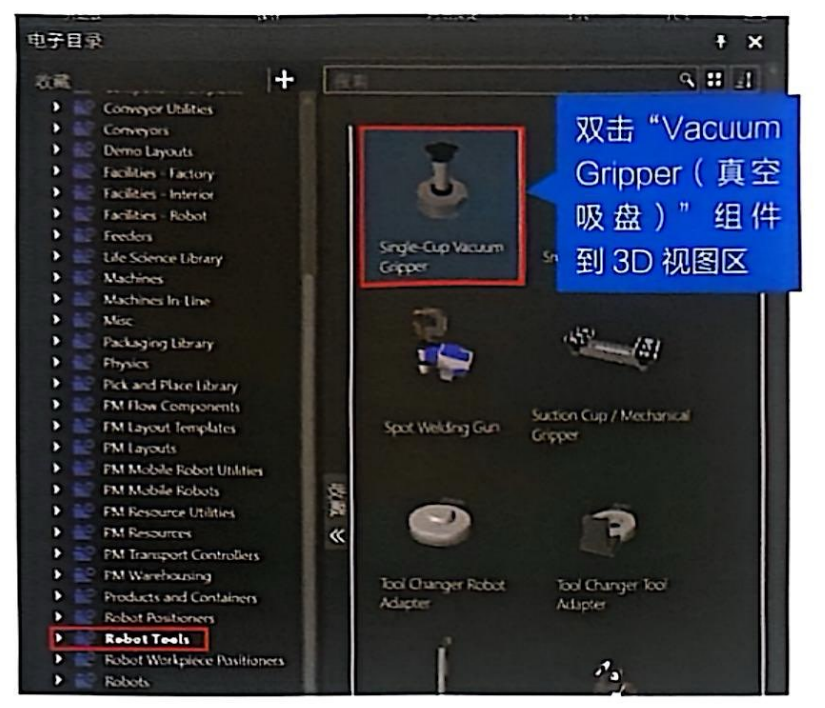
在“电子目录”面板中双击“Robot Tools”文件夹,双击或单击并拖动“Vacuum Gripper(真空吸盘)”组件到3D视图区,如图所示。
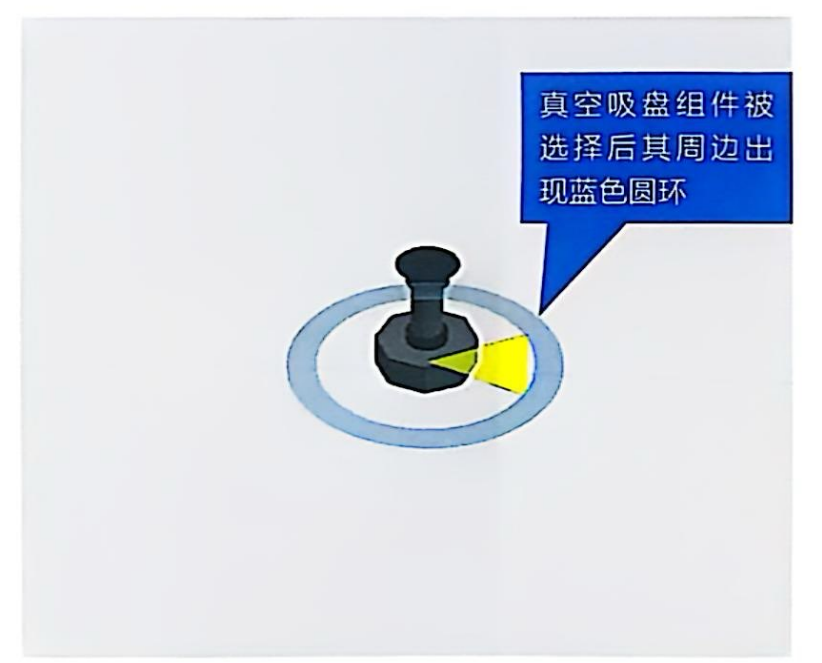
在“PnP”状态下(使“开始’选项卡上“操作”组中的“PnP按钮处于被选择状态),选择机器人“Vacuum Gripper(真空吸盘)”组件,真空吸盘组件被选择后,其周边出现蓝色圆环,如图所示。
单击并拖动“Vacuum Grippe(真空吸盘)”组件至机器人末端附近,两组件接近后,在真空吸盘组件和机器人末端会出现一个绿色箭头,如图所示,表示两者属于可建立连接关系。
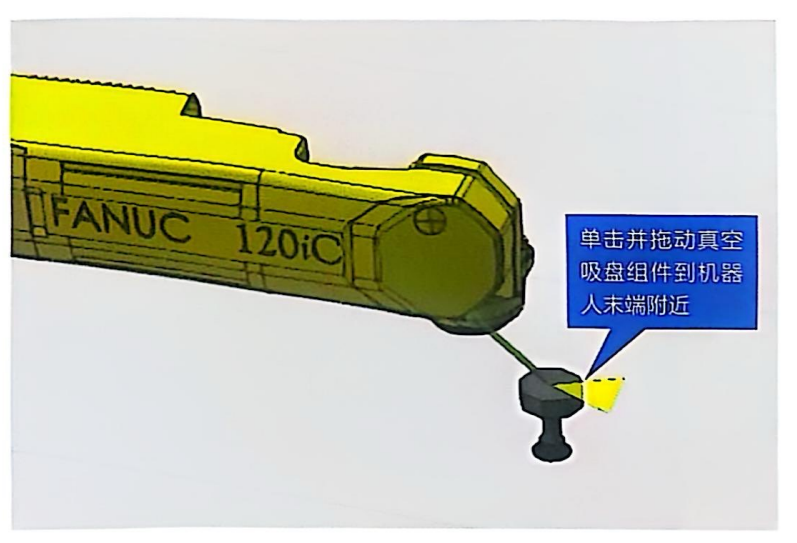
继续沿绿色箭头所指方向拖动吸盘组件,直至真空吸盘组件

