stm32/gd32驱动DAC8830(附源码)_dac8830电路原理图
文章目录
- DAC8830介绍
-
-
- 特性
- 功能框图
- 绝对最大额定值
- PIN 配置
- 时序图
-
- 原理图
-
- 硬件连接
- 主控芯片
-
- stm32ret6
- gd32f103ret6
- GD兆易GD32系列MCU替换ST芯片对照表
- 参考电压 MAX6225B
-
- 接线
- 手册
- 单极码
- 软件实现
-
- cubemx配置
- 代码
- 踩坑避雷
- 源码下载
DAC8830介绍
特性
- 16位分辨率
- 2.7V至5.5V单电源供电
- 极低功耗:3V供电时为15μW
- 高精度,积分非线性(INL):1 LSB
- 低噪声:10 nV/√Hz
- 快速建立时间:1.0μS
- 高速SPI™接口,最高可达50MHz
- 复位至零代码
- 施密特触发器输入,用于直接光耦合器接口
- 工业标准引脚配置
功能框图

绝对最大额定值
在工作自由空气温度范围内(除非另有说明)(1)
(1) 超过“绝对最大额定值”中所列的应力可能会对器件造成永久性损坏。长时间暴露在绝对最大条件下可能会影响器件的可靠性。
PIN 配置

时序图
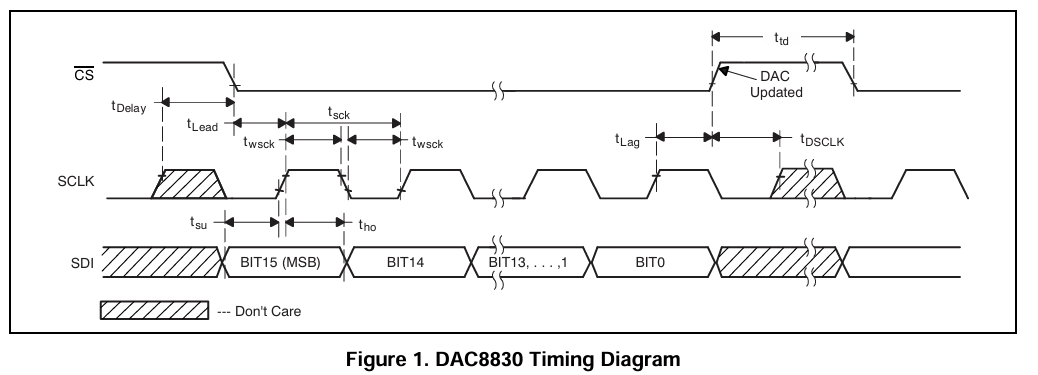
DAC8830的SPI时序图如图所示,可以看到这个模块是高位先行,16位收发,CS拉低时进行通讯。
同时关于CPOL和CPHA这两项一定不能配置错误,否则可能会导致数据解析出现异常,这两项要根据DAC8830提供的时许图来进行判断。CPOL意味着CLK在空闲状态时低还是高,而CPHA,则是来判断这个数据是在第一个边沿采集还是第二个边沿采集,通过查看DAC8830时序图,我们可以判断,空闲状态下的CLK为低电平,而采样在高电平
原理图
使用的主控芯片为gd32f103ret6
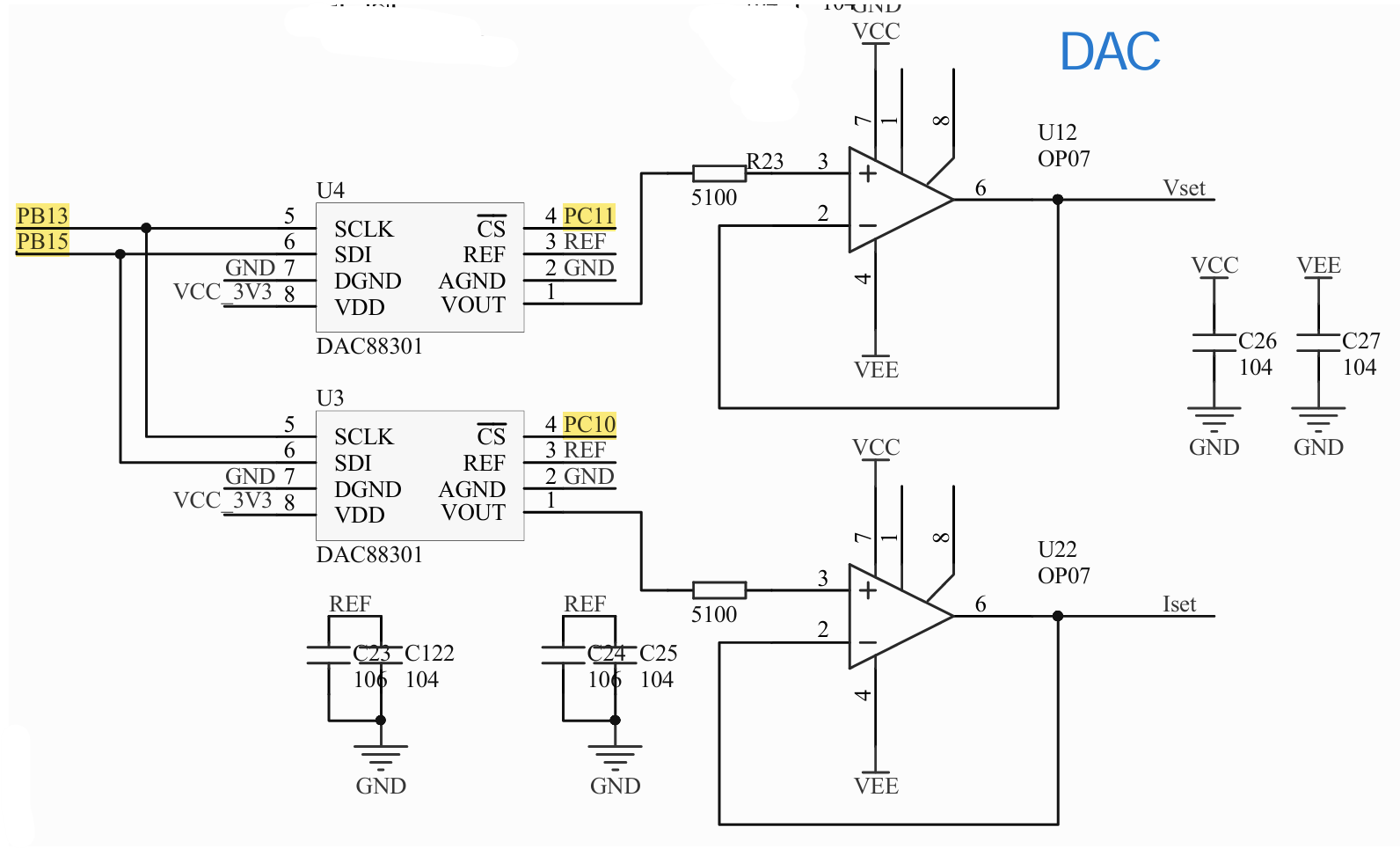
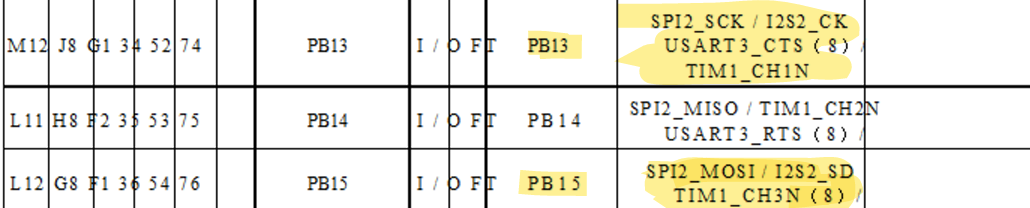
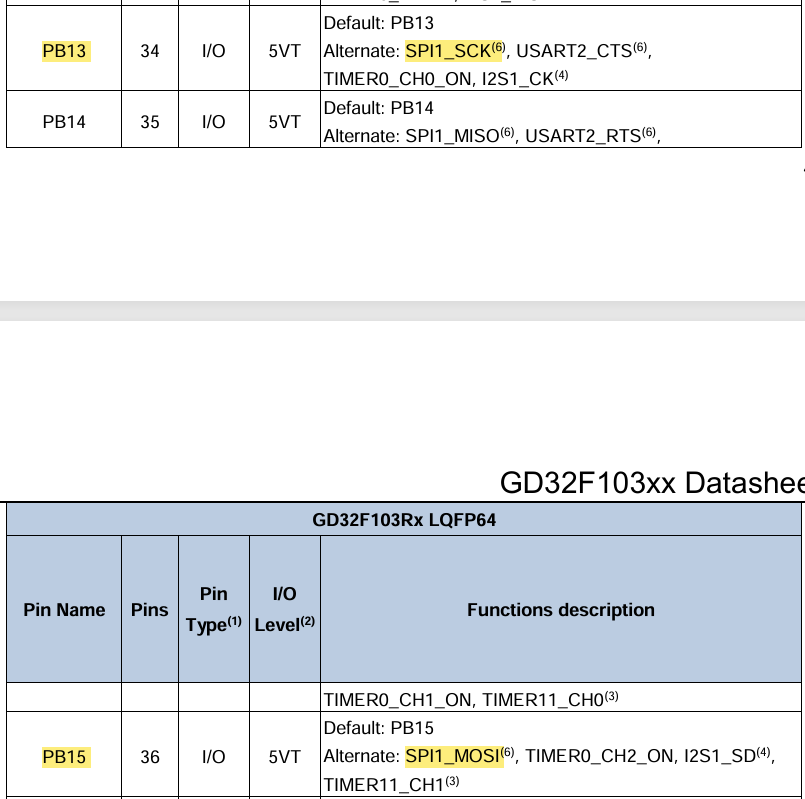
硬件连接
- SCLK → PB13 (SPI2_SCK)
- SDI → PB15 (SPI2_MOSI)
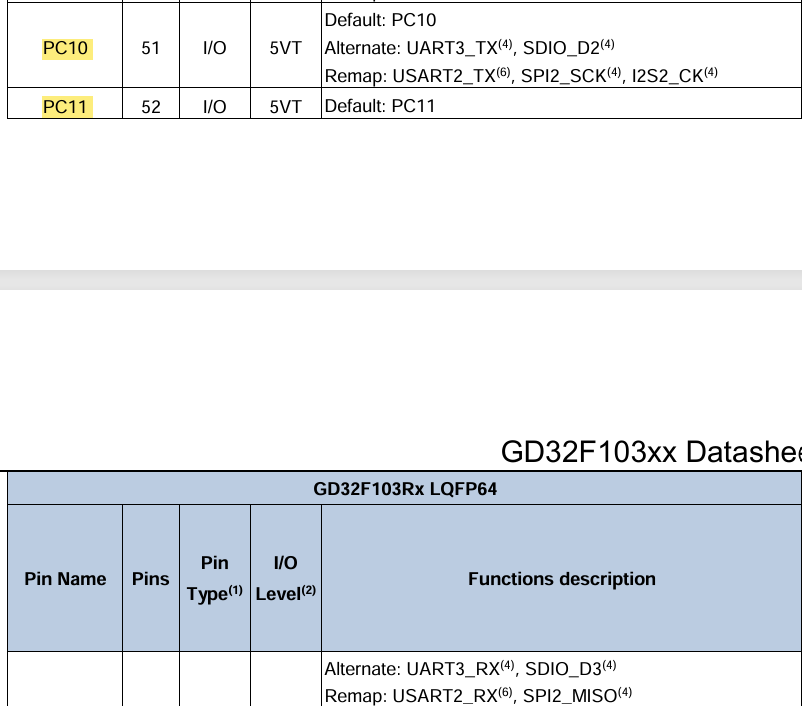
- CS → PC11 (GPIO 手动控制)
- VREF → 参考电压(如 2.5V 或 3.3V)
- GND → 共地
主控芯片
stm32ret6

gd32f103ret6

尝试用stm32的HAL库驱动
GD兆易GD32系列MCU替换ST芯片对照表
https://www.pcbcopy.com/2018/jishu_0827/1994.html
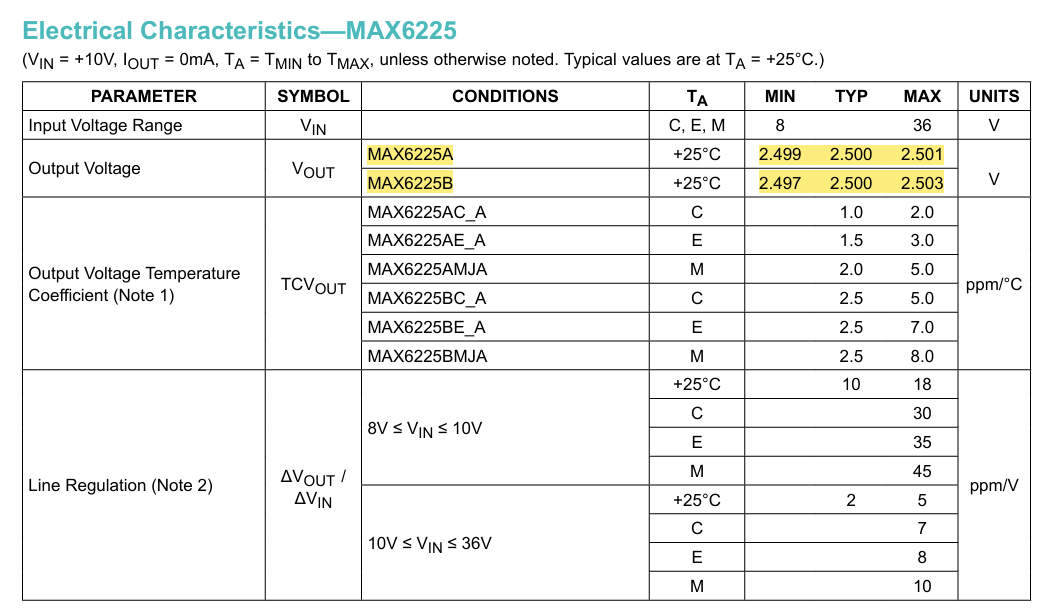
参考电压 MAX6225B
使用MAX6225B,通过查阅手册得知,输出电压是2.5V
接线

手册
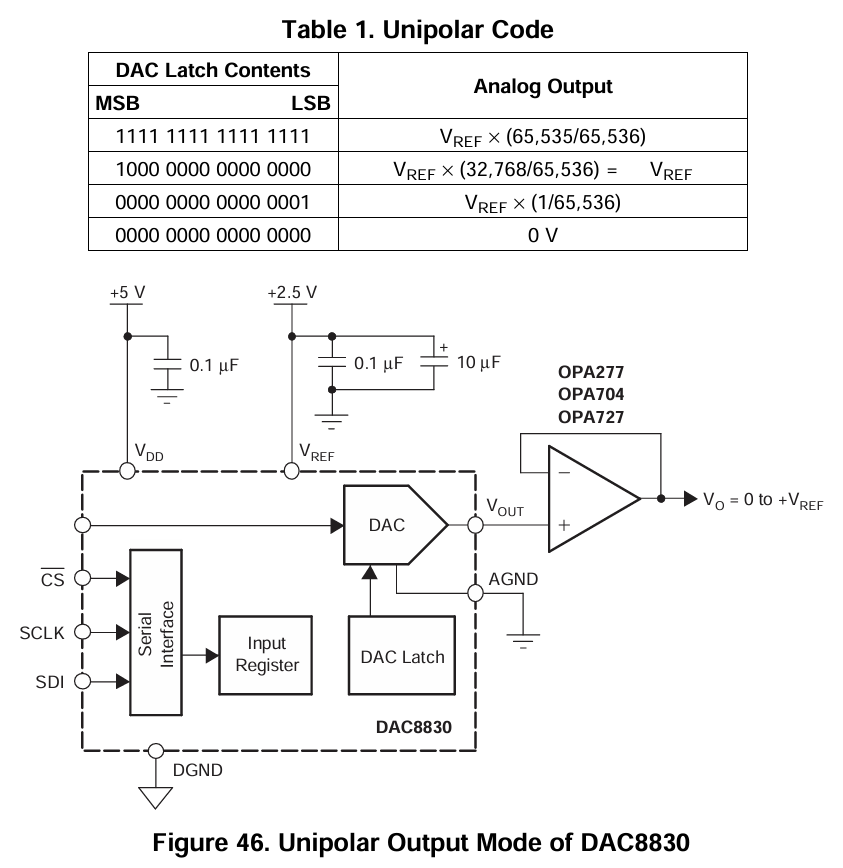
单极码
软件实现
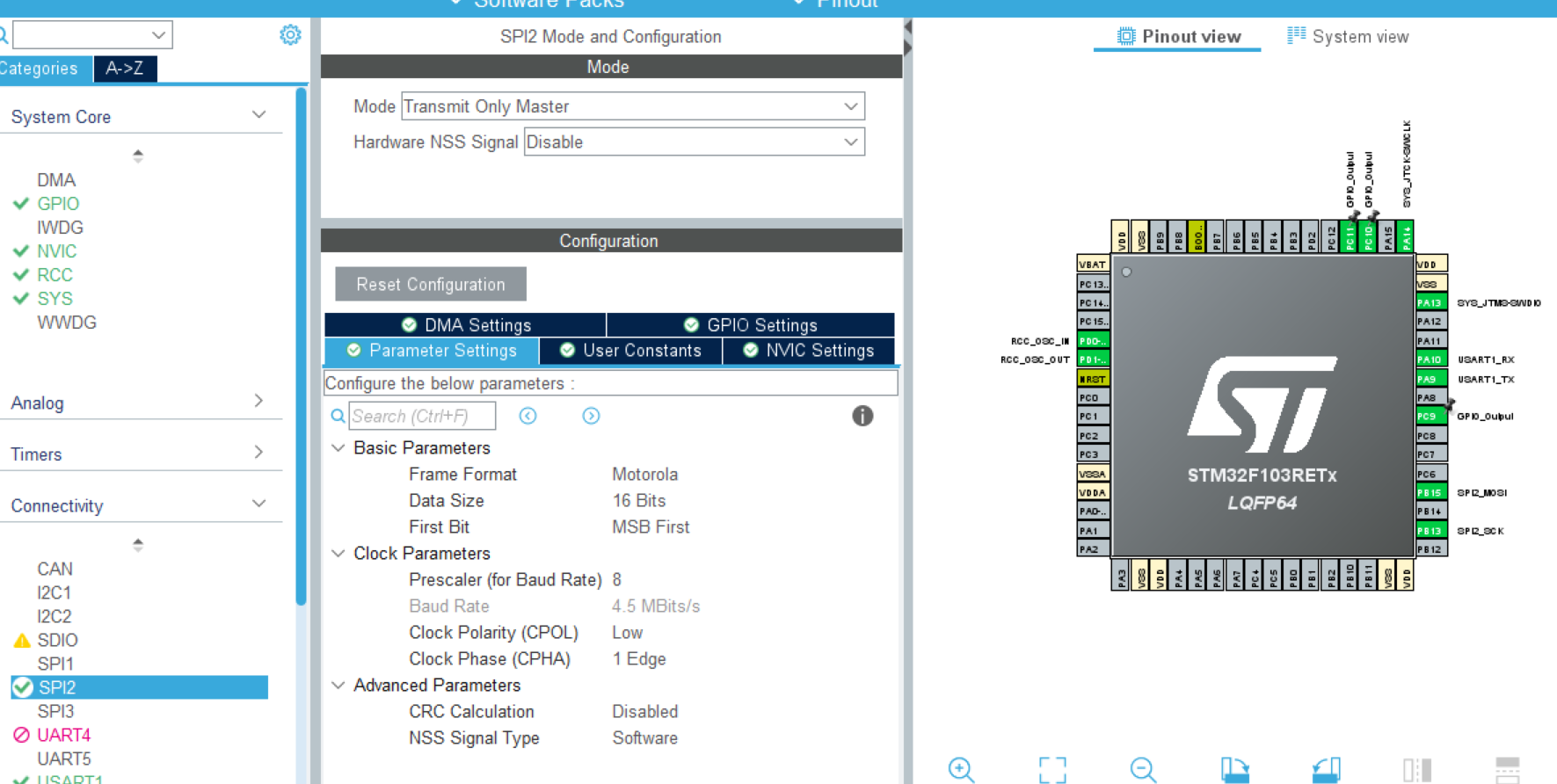
cubemx配置
代码
//dac8830.h#ifndef __DAC8830_H#define __DAC8830_H#include \"stm32f1xx_hal.h\"/* DAC8830引脚定义 */#define DAC8830_SCLK_PIN GPIO_PIN_13#define DAC8830_SCLK_PORT GPIOB#define DAC8830_SDI_PIN GPIO_PIN_15#define DAC8830_SDI_PORT GPIOB#define DAC8830_CS_PIN GPIO_PIN_11#define DAC8830_CS_PORT GPIOC/* 函数声明 */void DAC8830_Init(void);void DAC8830_WriteData(uint16_t data);void DAC8830_SetVoltage(float voltage);void DAC8830_SetOutput(uint16_t value);void DAC8830_PowerDown(void);void DAC8830_PowerUp(void);#endif /* __DAC8830_H *///dac8830.c#include \"dac8830.h\"#include \"spi.h\"/* 外部变量声明 */extern SPI_HandleTypeDef hspi2;/** * @brief DAC8830初始化函数 * @param None * @retval None * @note 初始化DAC8830,设置CS引脚为高电平,使DAC处于待机状态 */void DAC8830_Init(void){ /* CS引脚初始化为高电平,使DAC处于非选中状态 */ HAL_GPIO_WritePin(DAC8830_CS_PORT, DAC8830_CS_PIN, GPIO_PIN_SET); /* 延时一段时间确保DAC稳定 */ HAL_Delay(10); /* 输出0V,初始化DAC输出 */ DAC8830_SetOutput(0);}/** * @brief 向DAC8830写入16位数据 * @param data: 16位数据值 (0-65535) * @retval None * @note DAC8830是16位DAC,数据范围为0-65535 * 数据格式:MSB优先,16位数据直接传输 */void DAC8830_WriteData(uint16_t data){ uint8_t txData[2]; /* 将16位数据分成两个8位字节,高字节在前 */ txData[0] = (data >> 8) & 0xFF; // 高8位 txData[1] = data & 0xFF; // 低8位 /* CS拉低,选中DAC */ HAL_GPIO_WritePin(DAC8830_CS_PORT, DAC8830_CS_PIN, GPIO_PIN_RESET); /* 通过SPI发送数据 */ HAL_SPI_Transmit(&hspi2, txData, 2, 100); /* CS拉高,结束传输 */ HAL_GPIO_WritePin(DAC8830_CS_PORT, DAC8830_CS_PIN, GPIO_PIN_SET);}/** * @brief 设置DAC输出电压 * @param voltage: 电压值 (0.0V - 参考电压) * @retval None * @note 根据参考电压计算对应的数字值 * 参考电压设置为2.5V */void DAC8830_SetVoltage(float voltage){ uint16_t dacValue; float refVoltage = 2.5f; // 参考电压 /* 限制电压范围 */ if (voltage < 0.0f) { voltage = 0.0f; } else if (voltage > refVoltage) { voltage = refVoltage; } /* 计算DAC值:电压/参考电压 * 65535 */ dacValue = (uint16_t)((voltage / refVoltage) * 65535.0f); /* 写入DAC */ DAC8830_WriteData(dacValue);}/** * @brief 设置DAC输出数字值 * @param value: 16位数字值 (0-65535) * @retval None * @note 直接设置DAC的数字输出值 */void DAC8830_SetOutput(uint16_t value){ /* 限制数值范围 */ if (value > 65535) { value = 65535; } /* 写入DAC */ DAC8830_WriteData(value);}/** * @brief DAC8830掉电模式 * @param None * @retval None * @note 使DAC进入低功耗模式或输出0V */void DAC8830_PowerDown(void){ /* 方案1:输出0V(当前实现) */ DAC8830_SetOutput(0); /* 方案2:如果DAC8830支持真正的掉电模式 */ /* uint16_t powerDownCommand = 0x8000; // 掉电命令 */ /* DAC8830_WriteData(powerDownCommand); */ /* 延时确保输出稳定 */ HAL_Delay(1);}/** * @brief DAC8830唤醒 * @param None * @retval None * @note 从掉电模式唤醒DAC或重新初始化 */void DAC8830_PowerUp(void){ /* 方案1:如果之前是输出0V,现在可以重新设置输出 */ /* 这里只是延时,实际唤醒需要重新设置输出值 */ /* 方案2:如果DAC8830支持真正的掉电模式 */ /* uint16_t normalCommand = 0x0000; // 正常工作命令 */ /* DAC8830_WriteData(normalCommand); */ /* 延时确保DAC稳定 */ HAL_Delay(10);}\\\\main.c/* USER CODE BEGIN Header *//** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2025 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** *//* USER CODE END Header *//* Includes ------------------------------------------------------------------*/#include \"main.h\"#include \"spi.h\"#include \"usart.h\"#include \"gpio.h\"/* Private includes ----------------------------------------------------------*//* USER CODE BEGIN Includes */#include \"string.h\"#include \"dac8830.h\"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*//* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*//* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*//* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/void SystemClock_Config(void);/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*//* USER CODE BEGIN 0 *//* USER CODE END 0 *//** * @brief The application entry point. * @retval int */int main(void){ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART1_UART_Init(); MX_SPI2_Init(); /* USER CODE BEGIN 2 */ /* 初始化DAC8830 */ DAC8830_Init(); char message[]=\"DAC8830 Test\"; /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* DAC8830测试程序 - 输出直流电压 */ HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9, GPIO_PIN_RESET); // 485 CON=0 /* 输出1.25V (2.5V的一半) */ DAC8830_SetVoltage(1.25f); HAL_UART_Transmit(&huart1,(uint8_t*)\"DAC Output: 1.25V\\r\\n\",20,100); HAL_Delay(2000); /* 输出2.5V (最大电压) */ DAC8830_SetVoltage(2.5f); HAL_UART_Transmit(&huart1,(uint8_t*)\"DAC Output: 2.5V\\r\\n\",20,100); HAL_Delay(2000); /* 输出0V */ DAC8830_SetVoltage(0.0f); HAL_UART_Transmit(&huart1,(uint8_t*)\"DAC Output: 0V\\r\\n\",18,100); HAL_Delay(2000); /* 也可以直接设置数字值 */ DAC8830_SetOutput(32768); // 输出1.25V (65535的一半) HAL_UART_Transmit(&huart1,(uint8_t*)\"DAC Digital: 32768\\r\\n\",22,100); HAL_Delay(2000); HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9, GPIO_PIN_SET); // 485 CON=1 /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */}/** * @brief System Clock Configuration * @retval None */void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); }}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//** * @brief This function is executed in case of error occurrence. * @retval None */void Error_Handler(void){ /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */}#ifdef USE_FULL_ASSERT/** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */void assert_failed(uint8_t *file, uint32_t line){ /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf(\"Wrong parameters value: file %s on line %d\\r\\n\", file, line) */ /* USER CODE END 6 */}#endif /* USE_FULL_ASSERT */踩坑避雷
现象:测试时设置输出电压为0,0.5,1.0,1.5,2.0,2.5
0V、0.5V、1.0V能正常设置,1.5V、2.0V、2.5V不正常。
解决方式:降低spi传输速率,又原来的8分频改成32分频
源码下载
https://wwzv.lanzouw.com/iCwZ833f87ob


