使用安全继电器的急停电路设计_急停安全回路
使用安全继电器的急停电路设计
- 一,急停回路的设计
-
- 1,如何将急停接到线路当中?
- 2,急停开关 如何接到安全继电器中
- 二,急停回路说明
一,急停回路的设计
急停是每一个设备必不可少的部分,因为关乎安全,所以说所以说他的设计是非常重要的;
急停可以选择常开出点与常闭触点,按照安全等级要求的话,选择长鼻触电是比较合适的;
(选择常开触电的话,整个回路就是断开的,一旦出现线路损坏,则会导致急停失效,出现安全隐患)
1,如何将急停接到线路当中?
①,接到普通的继电器当中(不推荐);
②,接到安全的继电器当中;
③,接到安全的PLC当中(成本高),只有当系统中用到的安全继电器很多时才选择用安全PLC;
2,急停开关 如何接到安全继电器中
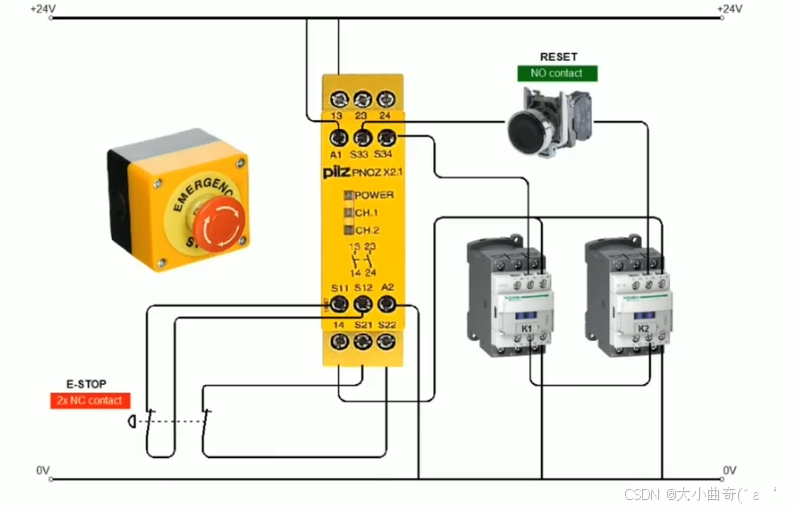
如上图所示,
①,黄色的是安全继电器,首先给他供个电源,A1(正),A2(负)接24V的电源;
②,S11和S12, S21和S22是接急停+安全门(两者串联)两个常闭触点;
③,S33,S34是复位的功能,使用中间继电器110-200K911A与110-200K911B的常闭触点进行串联,实现自动复位;
④13,14和23,24是它的两对常开触电,正常情况下,急停未被触发,13,14和23,24是闭合的,可以给它接两个中间继电器,在使用中间继电器触点控制其他部分(如电机,机器人等等);
⑤,急停未被触发的正常情况下,安全继电器上面的灯CH1和CH2是亮的,急停拍下以后,这两个灯是灭掉的;
⑥,灯灭掉之后,再把急停恢复之后,这个安全继电器是不能自动复位的,只有当S33,S34两者之间被导通一下才能实现复位;
如果需要自动复位的话,将S33,S34接到这两个继电器的常闭的触点,会实现自动复位的功能;
⑦,选择两个普通中间继电器的目的:可以将这连个中间继电器的常开触点KA串联接到PLC当中;以防止KA1,KA2触点的捏和,故选择两个中间继电器;
⑧,包括一些关键的设备,因为所使用的中间继电器有很多触点,不仅是可以接到PLC当中,也是可以设计在硬件回路当中,比如说关键性的设备,可以将KA1,KA2常开触点串联到其中;
⑨,对于变频设备,正常情况下都知道有个STO的功能,可以将KA1,KA2的常开触点接到变频器的STO的的线路当中;
这样会使设备更加的安全
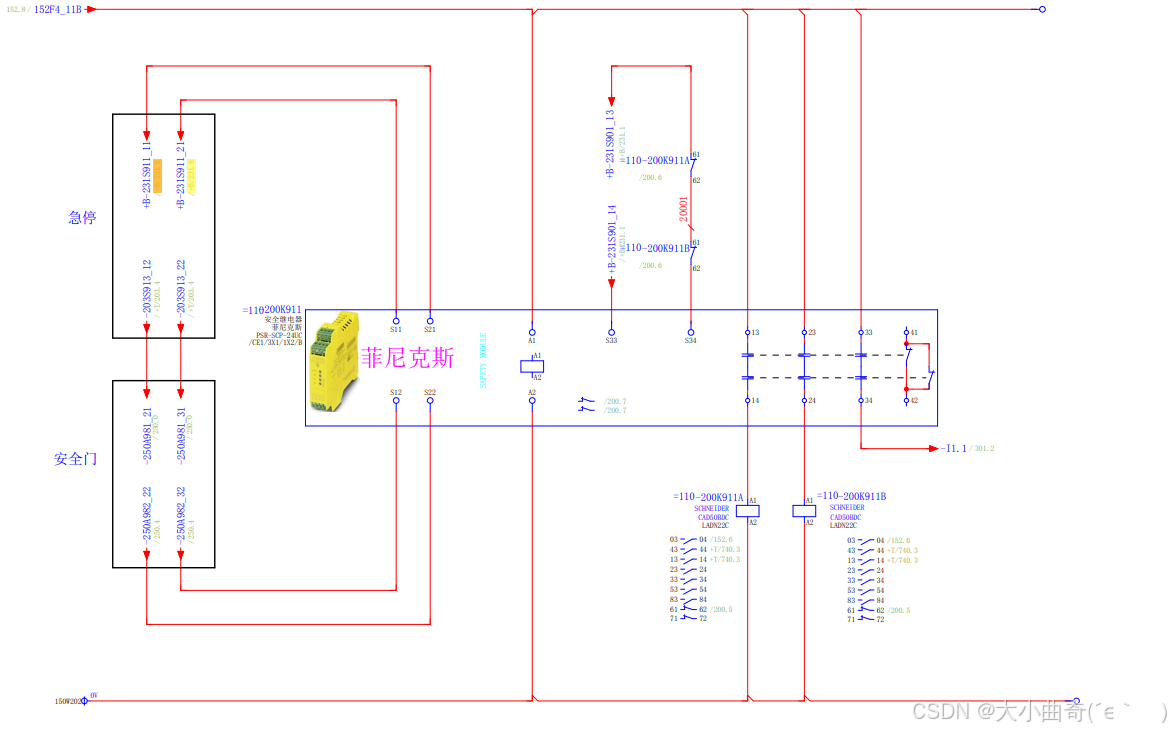
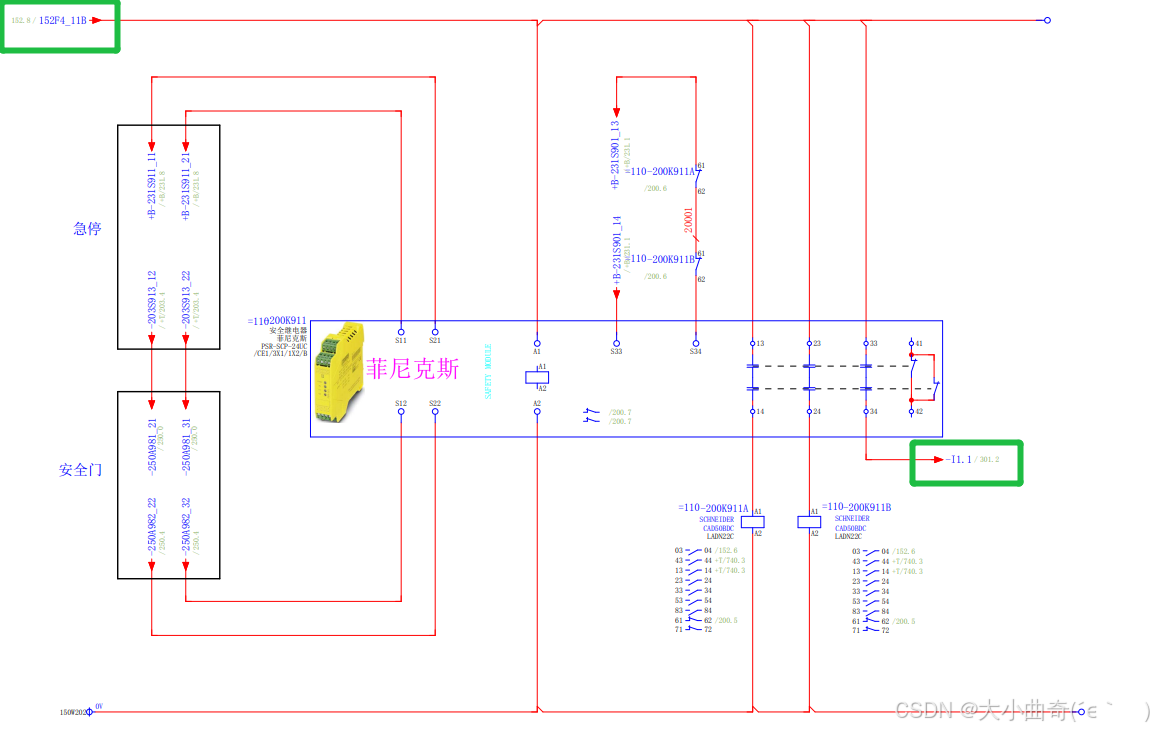
二,急停回路说明
①,I1.1是急停和安全门安全继电器运行信号,由安全继电器发出,直接接到输入端子排;由空开152F4_11B提供电源;
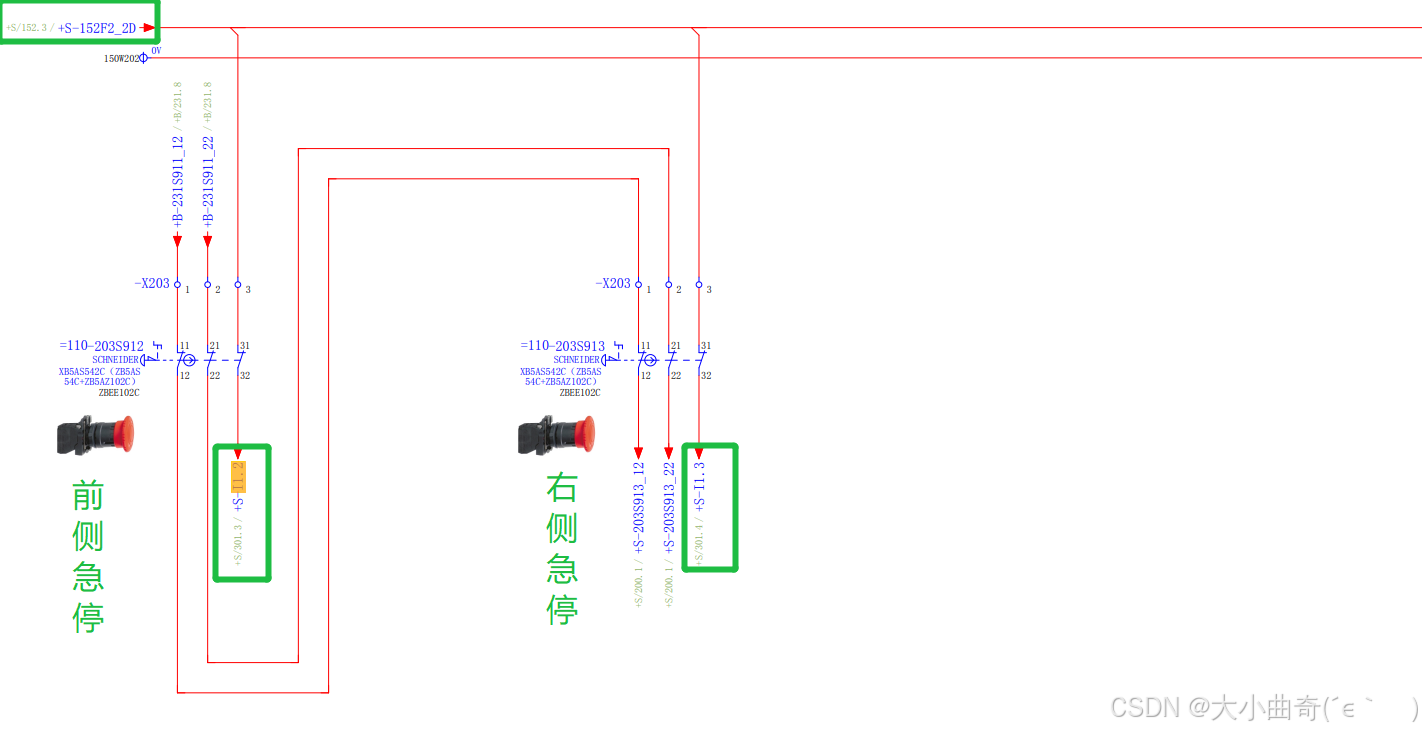
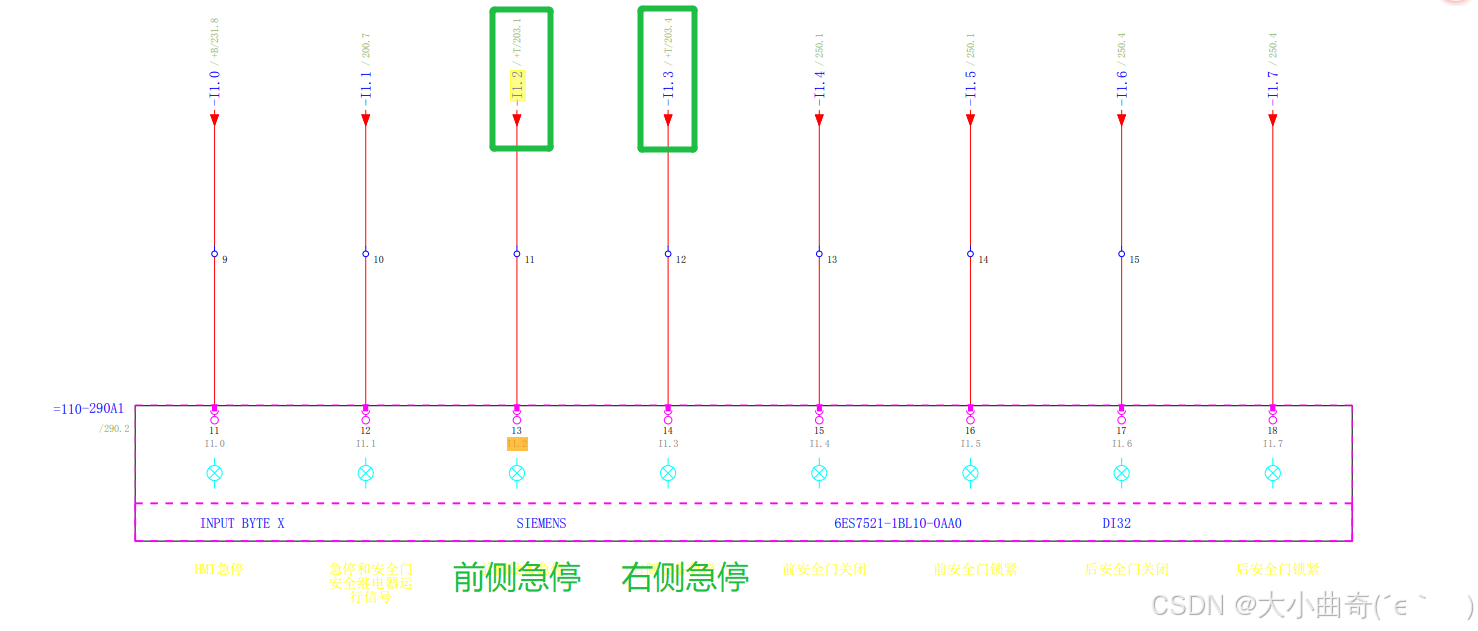
②,I1.2,I1.3是急停和安全门的信号,作为PLC的输入信号,使PLC做出有针对性的报警(告诉PLC急停被拍下,此时要报警)
);
I1.2,I1.3由空开S-152F2_2D供电,直接接到端子排;
③,安全继电器所连接的两个中间继电器(200K911A,200K911B),
两个中继其常开触点串联接入空开110-152F4,确保急停被拍下后其所控支路被断开(如下图伺服,阀岛支路);
但是安全继电器与安全门供电也是连接空开110-152F4,但它们不会被断开(如下图所示);
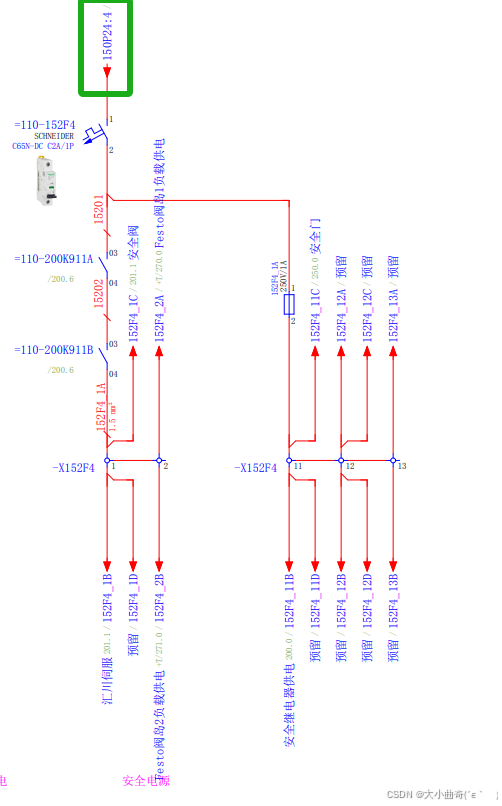
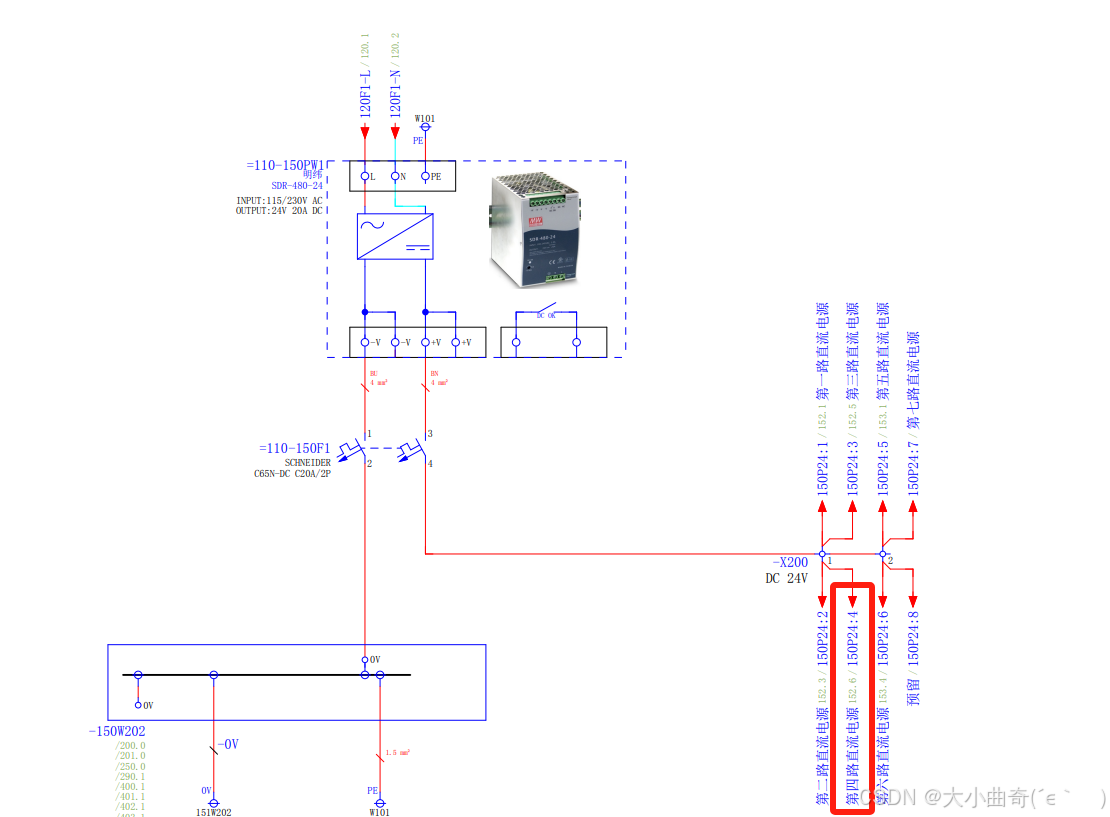
上图的空开电力来源:
150P24:4是24V开关电源的第四路直流电源(如下图);
空开110-152F4给汇川伺服所连接的接触器线圈供电;急停被拍下,则接触器线圈失电,
进而伺服驱动器的主回路电源输入被断开;控制回路保持正常;
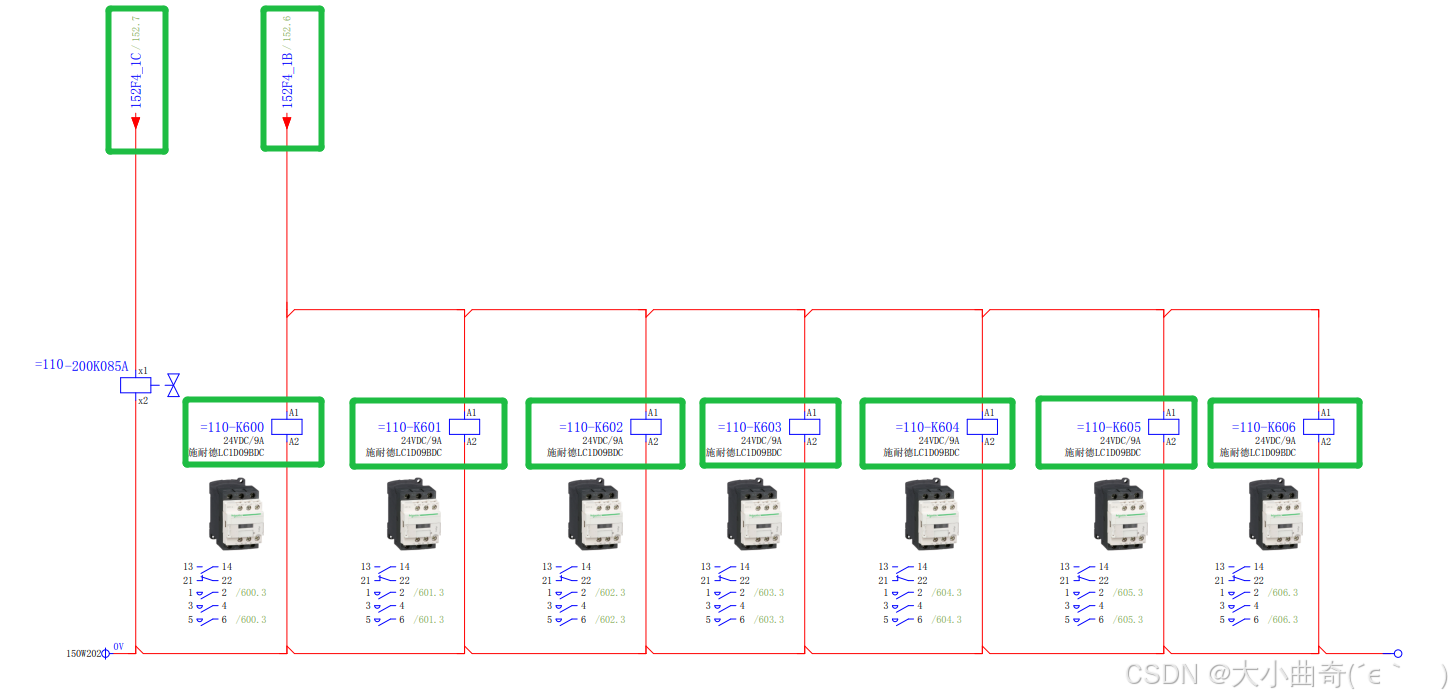
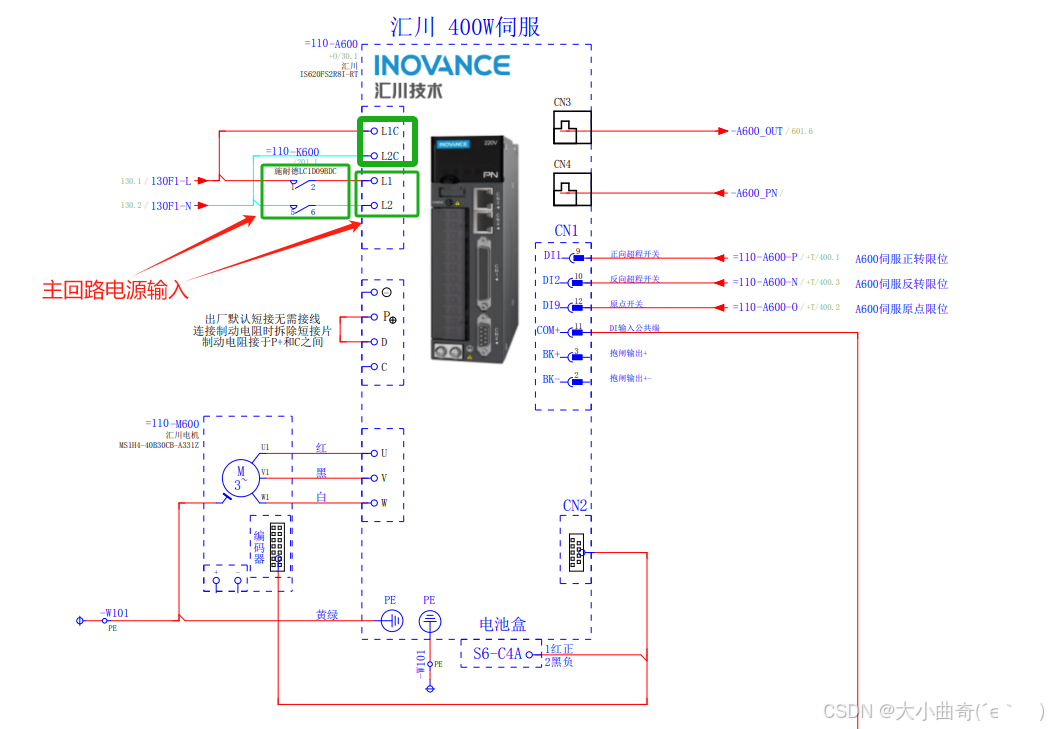
其中L1C和L2C是控制回路,L1和L2是主回路电源输入(单相220V);
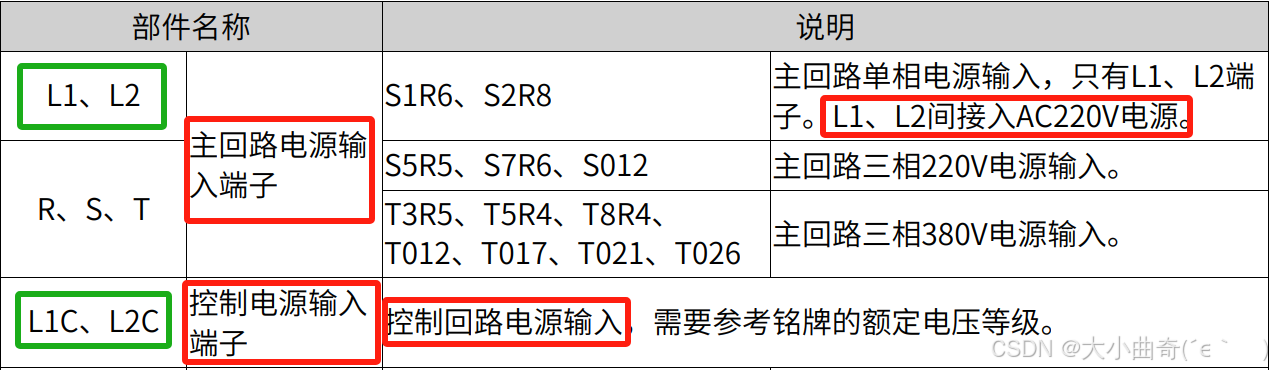
控制回路电源断开(如L1C和L2C端子断电):
• 驱动器无法正常工作:控制回路电源是驱动器控制板、逻辑电路和其他控制功能的基础。
如果控制电源丢失,驱动器的控制电路将无法正常运行,
导致驱动器无法接收外部控制信号,也无法执行任何控制指令。
• 驱动器进入保护状态:为了防止因控制信号丢失而导致的意外运行,
驱动器通常会进入保护状态,停止所有输出,并可能触发报警。
• 状态指示灯变化:驱动器上的状态指示灯可能会显示错误或报警状态,提示控制电源丢失或控制回路故障。
驱动器无法接收到外部的启动、速度调节或位置控制指令,电机将停止运行。
主回路电源断开
如果控制电源有,主电源无,汇川伺服驱动器最大的特点是会报警/显示故障代码,并且伺服轴无法使能或运行。
④,安全继电器所连接的两个中间继电器(200K911A,200K911B)
其常开触点接入发那科机器人控制器的ESS1,ESS11与ESS2,ESS22接线端子;(急停单元接线端子)
其常开触点接入发那科机器人控制器的EAS1,EAS11与EAS2,EAS22接线端子;(外部安全门或光栅接线端子)
以确保急停被按下后机械手停止;
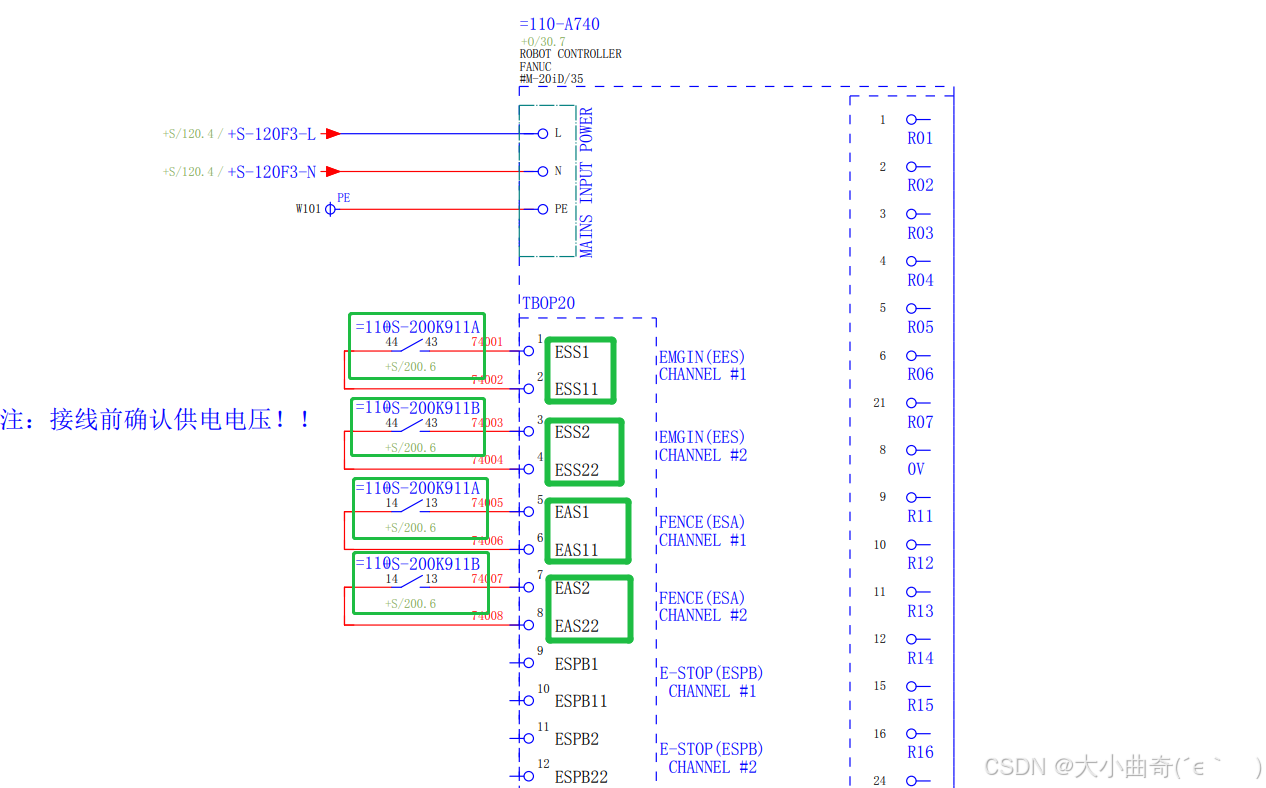
说明1:
ESS1与ESS11(或者ESS2与ESS22)
功能: 这是紧急停止回路的核心输入/输出端子对。
作用原理:
ESS1(输出): 从控制柜内部的安全继电器板(如 SRVO-01 板或其后续型号上的安全继电器)输出一个安全直流电压(通常是 24V DC);
ESS11(输入): 这个端子接收从外部安全回路返回的电压信号;
说明2:
EAS1与EAS11(或者EAS2与EAS22)
功能: 这是外部自动停止的专用输入端子对。
作用原理:
EAS1(输出): 从控制柜内部的安全继电器板输出一个安全直流电压(通常也是 24V DC)。
EAS11(输入): 这个端子接收从外部专用回路返回的电压信号。


