用opencv和caixcam进行矩形框识别中点坐标输出,以及激光识别和激光坐标输出。#电赛E题_识别矩形并获取四个点的坐标
主包比较懒不想写太多。
在嵌入式系统(如 MaixCAM)中,如何高效地识别图像中的特征,并将这些数据实时传输到主控板或机器人控制器,是实际应用中最关键的一环。本文将通过一个红点识别 + 矩形检测 + 串口传输的完整案例,解析背后的原理与实现方法。
适用场景如:
-
棋盘识别(三子棋、定位标靶等)
-
激光点跟踪系统
-
机器人对位视觉引导
-
人机交互识别与图像辅助控制
实现效果:
先将识别到的四个角点传出,传出后不再识别(因为是固定的)。
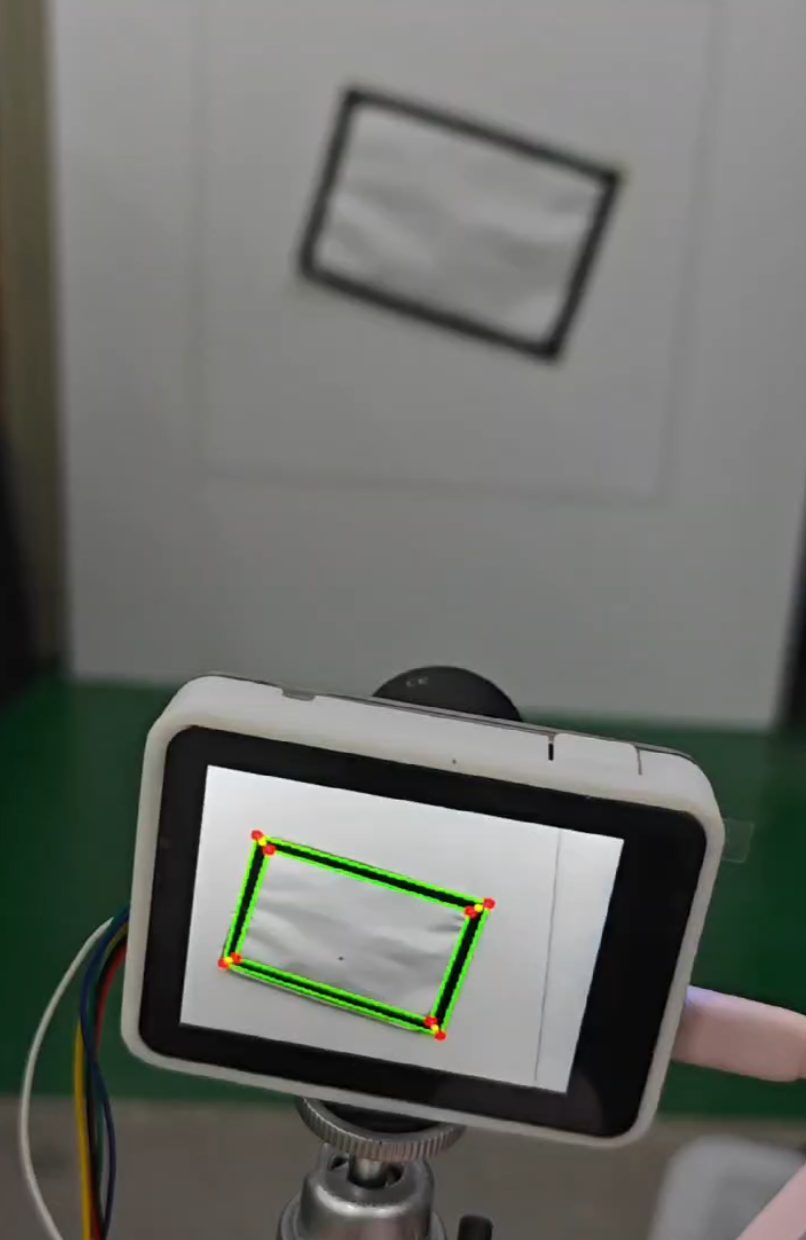
随后识别红激光。实时传输激光位置。
矩形检测与中点计算
目标:找到两个矩形之间的对应角点,并计算四个中点(例如:棋盘格或坐标定位板)
关键步骤:
-
轮廓提取:使用
adaptiveThreshold+morphologyEx组合增强二值图像 -
多边形拟合:
cv2.approxPolyDP找到4点的凸四边形 -
矩形判断:角度接近90°、边界不越界、面积合理
-
重复矩形去重:使用
is_similar_rect判定是否为“同一个矩形” -
角点匹配:使用欧几里得距离最短匹配两个矩形角点之间的对应关系
最终计算两个矩形的 4 个中点位置。
系统通过串口向主控发送如下格式的数据包:
| AA 55 | 红点X | 红点Y | 中点1X | 中点1Y | ... | 中点4X | 中点4Y |
payload = b\'\\xAA\\x55\'payload += pack(\"<hh\", *red_dot)for x, y in midpoints: payload += pack(\"<hh\", x, y)serial.write(payload)发送格式采用小端字节序(<h),方便主控直接反序列化读取。
完整代码如下:
from maix import image, camera, display, app, uart, timeimport cv2import numpy as npfrom struct import pack# 初始化串口serial = uart.UART(\"/dev/ttyS0\", 115200)# 初始化摄像头和显示器cam = camera.Camera(320, 240, fps=80)disp = display.Display()#红色在 RGB 空间容易受光照干扰,而在 LAB 色彩空间的 A 通道 中,红色数值范围更集中。# 红点检测阈值(LAB 色彩空间 A 通道)A_MIN = 150A_MAX = 255kernel_red = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))MIN_AREA = 2000MAX_AREA = 80000pause_rect_detect = False # 是否暂停矩形检测def sort_rect_points(pts): pts = sorted(pts, key=lambda p: (p[1], p[0])) top = sorted(pts[:2], key=lambda p: p[0]) bottom = sorted(pts[2:], key=lambda p: p[0], reverse=True) return [top[0], top[1], bottom[0], bottom[1]]def match_corners_by_distance(ref_pts, target_pts): matched = [None] * 4 used = [False] * 4 for i, p1 in enumerate(ref_pts): min_dist = float(\"inf\") min_j = -1 for j, p2 in enumerate(target_pts): if used[j]: continue dist = np.linalg.norm(np.array(p1) - np.array(p2)) if dist < min_dist: min_dist = dist min_j = j matched[i] = target_pts[min_j] used[min_j] = True return matcheddef is_similar_rect(rect1, rect2, threshold=8, area_thresh=0.05): try: rect1 = sort_rect_points(rect1) rect2 = sort_rect_points(rect2) avg_dist = np.mean([np.linalg.norm(np.array(p1) - np.array(p2)) for p1, p2 in zip(rect1, rect2)]) area1 = cv2.contourArea(np.array(rect1, dtype=np.int32)) area2 = cv2.contourArea(np.array(rect2, dtype=np.int32)) area_diff_ratio = abs(area1 - area2) / max(area1, area2) return avg_dist < threshold and area_diff_ratio < area_thresh except Exception as e: print(\"矩形比较异常:\", e) return Falsedef is_rectangle(approx): if approx is None or len(approx) != 4 or not cv2.isContourConvex(approx): return False pts = [point[0] for point in approx] def angle(p1, p2, p3): v1 = np.array(p1) - np.array(p2) v2 = np.array(p3) - np.array(p2) norm1 = np.linalg.norm(v1) norm2 = np.linalg.norm(v2) if norm1 == 0 or norm2 == 0: return 0 cos_angle = np.clip(np.dot(v1, v2) / (norm1 * norm2), -1.0, 1.0) return np.arccos(cos_angle) * 180 / np.pi angles = [angle(pts[i - 1], pts[i], pts[(i + 1) % 4]) for i in range(4)] return all(80 < ang 20: M = cv2.moments(max_cnt) if M[\"m00\"] != 0: cx = int(M[\"m10\"] / M[\"m00\"]) cy = int(M[\"m01\"] / M[\"m00\"]) red_dot = (cx, cy) cv2.circle(img_raw, (cx, cy), 5, (0, 255, 0), -1) except Exception as e: print(\"红点检测异常:\", e) # 矩形检测与中点计算 if not pause_rect_detect: try: gray = cv2.cvtColor(img_raw, cv2.COLOR_BGR2GRAY) bin_img = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2) closed = cv2.morphologyEx(bin_img, cv2.MORPH_CLOSE, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) contours, _ = cv2.findContours(closed, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) rectangles = [] for contour in contours: area = cv2.contourArea(contour) if not (MIN_AREA <= area <= MAX_AREA): continue x, y, w, h = cv2.boundingRect(contour) margin = 1 # 可调边缘安全距离(像素) if x < margin or y img_raw.shape[1] - margin or y + h > img_raw.shape[0] - margin: continue approx = cv2.approxPolyDP(contour, 0.02 * cv2.arcLength(contour, True), True) if is_rectangle(approx): rect = [tuple(pt[0]) for pt in approx] if not any(is_similar_rect(rect, r) for r in rectangles): rectangles.append(rect) cv2.drawContours(img_raw, [np.array(rect, dtype=np.int32)], -1, (0, 255, 0), 2) for x, y in rect: cv2.circle(img_raw, (x, y), 5, (0, 0, 255), -1) if len(rectangles) == 2: r1 = sort_rect_points(rectangles[0]) r2_unsorted = sort_rect_points(rectangles[1]) r2 = match_corners_by_distance(r1, r2_unsorted) for i in range(4): mid = ((r1[i][0] + r2[i][0]) // 2, (r1[i][1] + r2[i][1]) // 2) midpoints[i] = mid cv2.line(img_raw, r1[i], r2[i], (255, 0, 255), 1) cv2.circle(img_raw, mid, 3, (0, 255, 255), -1) except Exception as e: print(\"矩形检测异常:\", e) # 数据打包并发送 try: payload = b\'\\xAA\\x55\' if red_dot[0] < 0 or red_dot[1] < 0: payload += pack(\"<hh\", 0, 0) else: payload += pack(\"<hh\", *red_dot) for x, y in midpoints: if x < 0 or y < 0: payload += pack(\"<hh\", 0, 0) else: payload += pack(\"<hh\", x, y) serial.write(payload) except Exception as e: print(\"串口发送异常:\", e) # 显示图像 try: img_show = image.cv2image(img_raw, copy=False) disp.show(img_show) except Exception as e: print(\"图像显示失败:\", e) time.sleep_ms(1) except Exception as e: print(\"主循环异常:\", e)

