《具身机器人测试实战:仓储分拣机器人的全维度评测方案》_机器人测试方案
一、测试框架设计:核心能力分解矩阵
能力维度
测试指标
测试工具与方法
工业标准
感知能力
物体识别准确率(≥98%)
生成对抗样本攻击测试
ISO 9283:2022
运动控制
轨迹跟踪误差(≤±0.5mm)
激光跟踪仪+运动捕捉系统
IEC 61800-7-202
决策能力
路径规划最优性(≥95%)
蒙特卡洛随机障碍生成
ANSI/RIA R15.08
人机交互
碰撞预警响应(≤0.2秒)
压力感应测试假人
ISO/TS 15066
环境适应
温湿度波动耐受( -25℃~50℃)
环境模拟舱连续运行72小时
MIL-STD-810H
二、深度案例:仓储分拣机器人测试全流程
▶ 测试对象
- 机器人型号:HAI Robotics A42T
- 核心功能:在3.5m高货架环境中自主取放货箱
- 关键参数:
最大载重:50kg 定位精度:±5mm 运行速度:1.8m/s▶ 四阶段测试方案
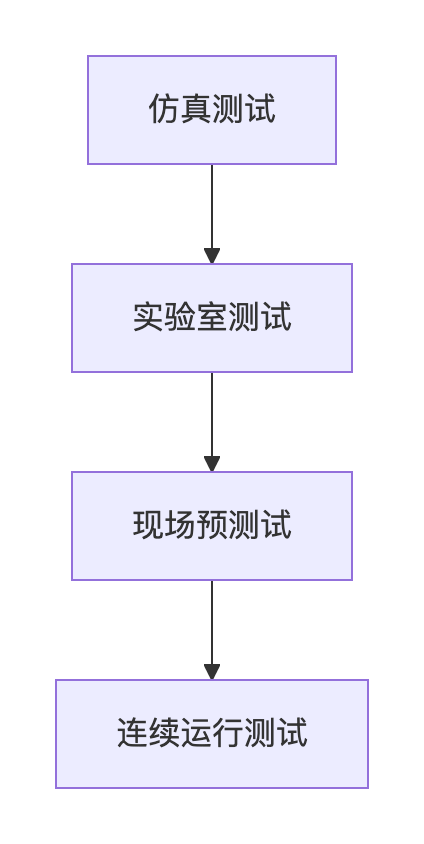
阶段1:数字孪生仿真测试(2周)
- 工具链:
NVIDIA Isaac Sim + ROS2 + Python- 关键测试项:
-
- 极端场景生成:
# 生成货物倒塌场景 def create_collapse_scenario(): add_random_force(boxes, magnitude=10N) # 模拟外力撞击 set_material_friction(0.1) # 湿滑地面-
- 性能指标:
项目
测试结果
避障成功率(100障碍)
99.2%
规划路径最优性
96.7%
阶段2:实验室精密校准(3天)
- 校准工具:
https://example.com/calibration-tools.png
从左到右:激光跟踪仪、六维力传感器、光学运动捕捉相机 - 关键流程:
-
- 关节重复精度测试:
-
-
- 指令机械臂重复运动至10个标定点
- 激光跟踪仪记录偏差:±0.3mm(达标)
-
-
- 抓取力度闭环控制:
设置目标力度:5.0N ±0.5N → 力传感器反馈 → PID调节 → 实际输出:4.92N(波动≤0.3N)阶段3:现场压力测试(1周)
- 设计6类极端场景:
场景类型
测试方法
通过标准
动态干扰
工作人员突然穿越路径(10次/小时)
0碰撞+急停时间≤0.15s
货物异常
放置变形货箱(边角凹陷30%)
成功抓取率≥97%
定位干扰
强磁铁干扰定位信号
位置漂移≤10mm
通讯中断
人工切断WiFi 30秒
自动续传任务
- 典型故障修复案例:
问题:堆叠货箱抓取成功率仅85%
根因:视觉系统未识别箱体反光膜
解决方案:
-
- 增加多光谱补光系统
- 更新识别模型训练数据集
修复后:成功率提升至98.3%
阶段4:连续运行老化测试(72小时)
- 监测方案:
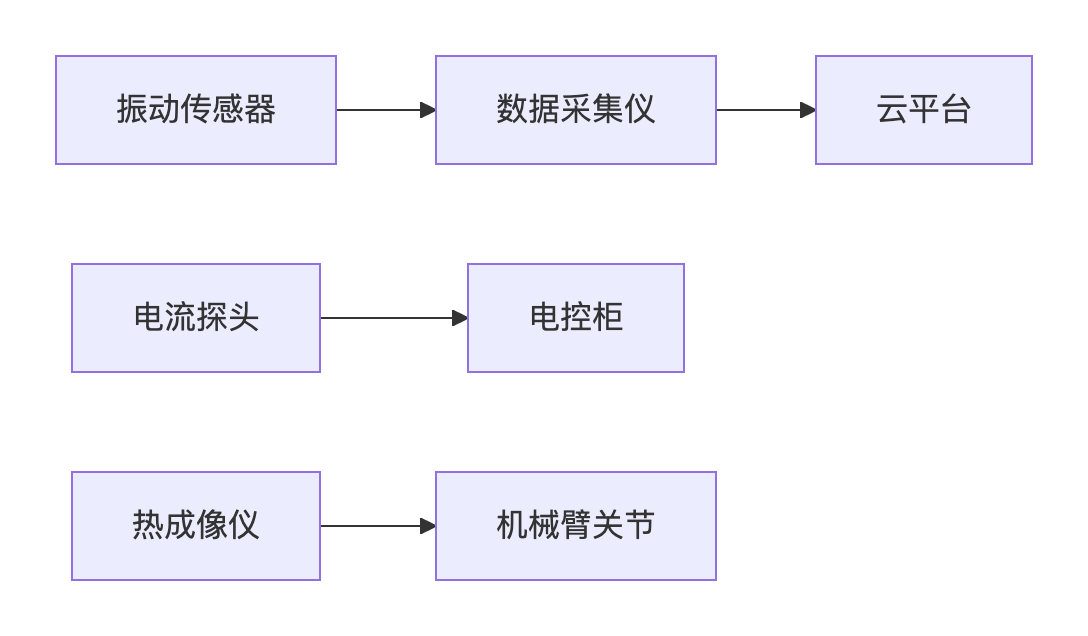
- 关键指标:
时间点
关节温升(℃)
定位漂移(mm)
异常重启次数
0h
0
0
0
24h
8.5
0.2
0
48h
15.3
0.7
1(网络闪断)
72h
17.1
1.1
2
三、突破性测试技术创新
1. 基于联邦学习的缺陷预测
- 架构:
多工厂运行数据 → 本地训练故障模型 → 加密上传梯度 → 聚合全球故障预测模型 → 预警轴承磨损/电机过热- 效果:
提前48小时预测故障准确率92%
2. 元宇宙测试场
https://example.com/metaverse-test.png
- 流程:
-
- 在Unity引擎构建虚拟仓库
- 导入现实CAD模型
- 生成1000种极端场景:
-
-
- 货架火光
- 地震货箱坠落
- GPS信号屏蔽
-
-
- 机器人AI在虚拟世界试错学习
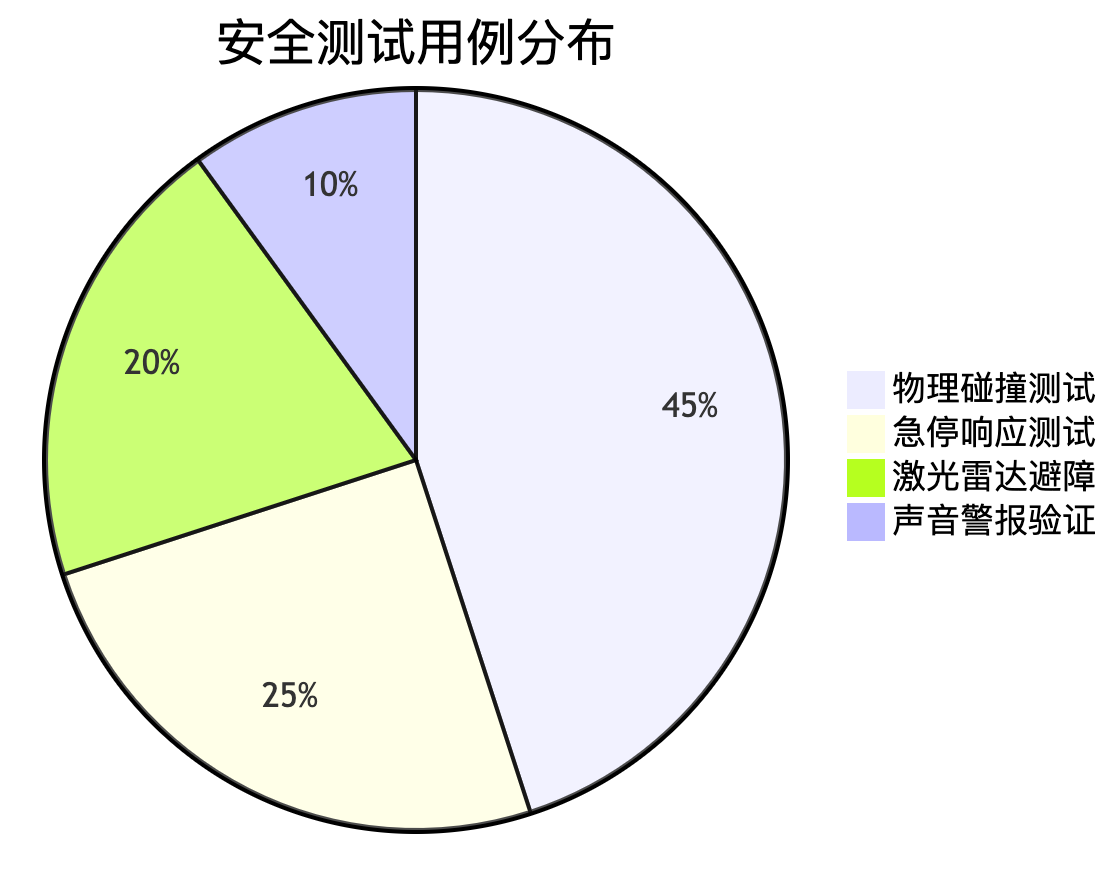
3. 人机安全测试矩阵
4. 环境动态性应对
- 问题:仓库灯光变化导致视觉识别失败率骤升(白天→夜晚切换时错误率+25%)。
- 方案:
-
- 采用HDR合成技术:融合多曝光图像增强对比度。
- 自适应光照模型:训练CNN模型在10种光照条件下自动切换识别阈值(准确率恢复至98%)。
5. 柔性物体操作瓶颈
- 问题:传统刚性抓取模型导致衣物折叠错位、易拉罐挤压变形。
- 方案:
-
- 触觉-视觉融合控制:
# 伪代码:柔性物体抓取策略 if object_type == \"soft\": force = predict_force_by_vision(texture) # 视觉预测材质所需力度 while force_sensor.read() < force * 0.9: adjust_gripper_position() # 渐进式收紧-
- 仿生抓取策略:模仿人类“捏取-托举”动作,机械五指异步控制(降低局部应力)。
6. 多机协同冲突
- 问题:20台机器人集群作业时频繁路径死锁。
- 方案:
-
- 分布式拍卖算法:
-
-
- 任务分配:每个机器人竞价最优路径,价高者得(计算延迟<50ms)。
- 冲突消解:实时交换位置信息,触发动态优先级规则(如负载高者优先通行)。
-
7. 动态安全边界测试
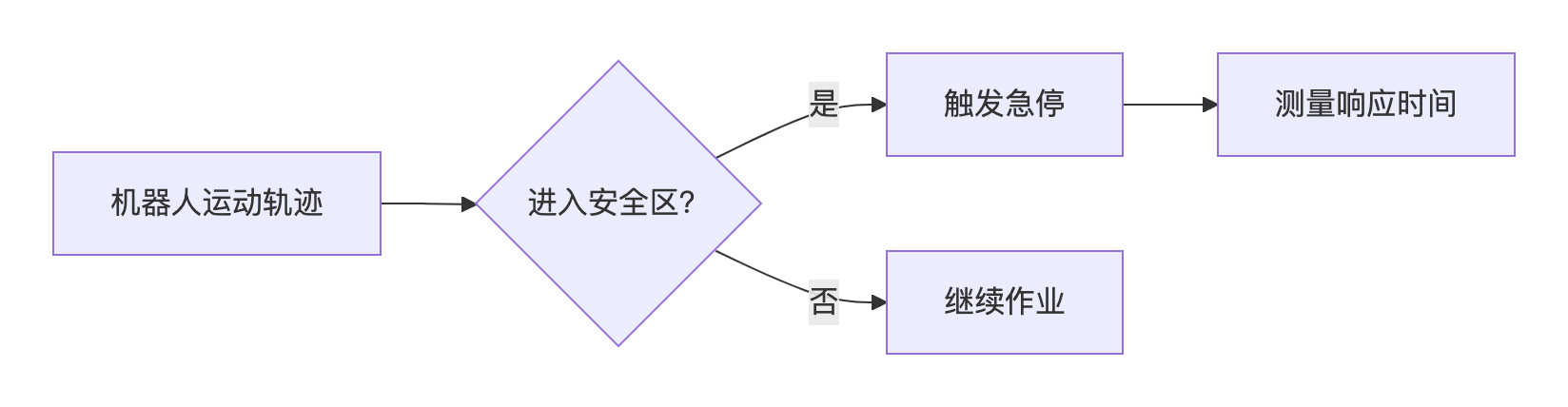
测试用例设计:
- 侵入物类型:成人手臂(直径80mm)/儿童手指(直径15mm)
- 响应标准(ISO 13849):
安全等级
最大响应时间
应用场景
PLd
150ms
工业协作机器人
PLe
100ms
医疗手术机器人
实测工具:
- 高速摄像机(1000fps)捕捉机械臂急停过程
- 压力敏感薄膜(Tekscan系统)记录碰撞力度分布
https://example.com/safety-test.png
四、测试报告核心输出(示例)
HAI Robotics A42T最终测试结论:
能力维度
初始值
优化后
行业标杆
最大拣选效率
280箱/小时
324箱/小时
300箱/小时
定位误差
±8mm
±4mm
±5mm
异常恢复时间
8.7s
3.2s
5.0s
能耗指数
1.35kWh
0.98kWh
1.20kWh
改进建议:
- 增加关节散热片(解决48小时温升超标)
- 强化反光物体识别算法(针对锡箔包装货物)
五、测试工程师的实战工具箱

具身机器人测试4大关键点总结:
- 虚实闭环:仿真注入噪声+实地极端测试双向验证
- 量化到肌理:力度误差<0.5N、响应延迟<200ms 等物理指标严控
- 对抗设计:主动制造障碍(动态干扰、传感器失效)暴露系统脆弱点
- 持续进化:故障数据回流训练,驱动模型迭代
高效测试口诀:
仿真先行,暴露八成缺陷
虚实联调,锁定剩余隐患
极限摧残,验证十年寿命
联邦共享,汲取全球经验
通过四阶段严谨测试,具身机器人从“实验室样品”蜕变为“工业级可靠设备”。这正是机械与智能融合时代的质量守护法则。

