矩阵寻宝奇旅:揭秘最大子矩阵与最大黑方阵的算法奥秘
在算法的星河中,矩阵问题犹如一座神秘迷宫。今日,我们将深入探索两颗耀眼的双子星——最大子矩阵与最大黑方阵。前者是动态规划的降维艺术,后者是边界检测的拓扑魔术。它们同处二维空间,却因目标不同走向分岔:一个追求内部总和最大化,一个苛求边界条件完美化。这场对决将揭示算法设计中的核心哲学:问题转化、时空权衡与预处理智慧。准备好你的思维罗盘,我们启程!
博客正文
问题一:最大子矩阵——动态规划的降维打击
给定一个字符串 s 和一个单词列表 wordDict,要求判断是否可以将 s 拆分成字典中的一个或多个单词。例如,输入 s = \"leetcode\",wordDict = [\"leet\", \"code\"],输出为 true,因为 s 可以拆分为 \"leet\" 和 \"code\"。
🔍 问题本质
给定一个混杂正负整数的 N×MN×M 矩阵,寻找和最大的连续子矩阵。输出其左上角 (r1,c1)(r1,c1) 和右下角 (r2,c2)(r2,c2) 坐标。
⚙️ 算法核心:从二维到一维的坍缩
-
预处理:行前缀和矩阵
-
构建前缀和数组
pref[i][j],存储第 ii 行前 jj 个元素之和。 -
目的:O(1)O(1) 时间计算任意行区间 [ca,cb][ca,cb] 的和。
-
-
枚举行对 + Kadane算法
-
-
-
利用前缀和优化,该步骤仅需 O(M)O(M) 时间。
-
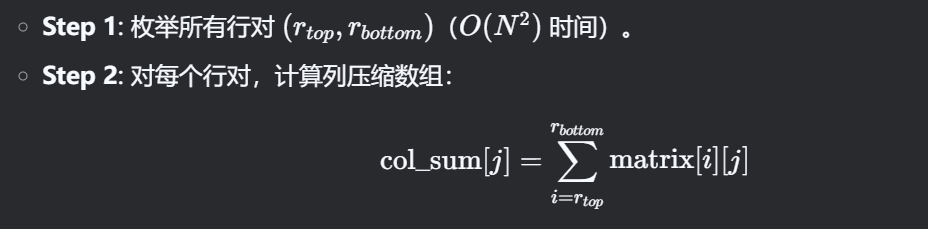
Step 3: 在
col_sum上运行 Kadane算法(一维最大子数组和):-
动态维护当前和
cur_sum、全局最大和max_sum及边界索引。 -
时间复杂度:O(M)O(M)。
-
-
-
时空复杂度
-
时间:O(N2×M)O(N2×M)(枚举行对 O(N2)O(N2) × Kadane算法 O(M)O(M))。
-
空间:O(M)O(M)(存储压缩后的一维数组)。
-
🎯 关键洞见
降维思想:将二维问题分解为“枚举行对 + 一维子问题”。Kadane算法在此扮演一维时空隧道,将复杂度从 O(N2M2)O(N2M2) 压缩至 O(N2M)O(N2M)。
详细分析:
- 状态定义:定义一个布尔数组
dp,其中dp[i]表示字符串s的前i个字符是否可以拆分成字典中的单词。 - 状态转移:
- 对于每个位置
i,遍历所有可能的单词word,如果word的长度为len,且s的子串s[i-len:i]等于word,并且dp[i-len]为true,则dp[i]设为true。
- 对于每个位置
- 初始化:
dp[0] = true,表示空字符串可以被拆分。 - 结果计算:
dp[s.length]即为答案。
验证示例:
- 示例1:输入
s = \"applepenapple\",wordDict = [\"apple\", \"pen\"],输出为true。s可以拆分为\"apple\",\"pen\",\"apple\"。
- 示例2:输入
s = \"catsandog\",wordDict = [\"cats\", \"dog\", \"sand\", \"and\", \"cat\"],输出为false。- 无法找到满足条件的拆分方式。
题目程序:
#include // 标准输入输出头文件#include // 标准库头文件,包含动态内存分配函数#include // 字符串处理头文件// 主功能函数:判断字符串s是否能拆分为字典中的单词int wordBreak(char* s, char** wordDict, int wordDictSize) { int n = strlen(s); // 获取输入字符串s的长度 // 动态分配并初始化dp数组(长度n+1),dp[i]表示前i个字符是否能拆分 int* dp = (int*)calloc(n + 1, sizeof(int)); // 使用calloc初始化为0 dp[0] = 1; // 空字符串视为可拆分(true) // 外层循环:遍历字符串的每个位置(1到n) for (int i = 1; i <= n; i++) { // 内层循环:遍历字典中的每个单词 for (int j = 0; j =单词长度 2.拆分点之前的子串可拆分 3.当前子串匹配单词 if (i >= len && dp[i - len]) { // 比较s[i-len]到s[i-1]的子串是否等于当前单词 if (strncmp(s + i - len, word, len) == 0) { dp[i] = 1; // 满足条件则标记当前位置可拆分 break; // 找到匹配后跳出内层循环,提高效率 } } } } int result = dp[n]; // 保存最终结果(整个字符串是否可拆分) free(dp); // 释放动态分配的dp数组 return result; // 返回最终结果}// 测试函数int main() { // 测试用例1:s=\"applepenapple\", wordDict=[\"apple\",\"pen\"] char* s1 = \"applepenapple\"; char* dict1[] = {\"apple\", \"pen\"}; int size1 = 2; printf(\"Test2: %d\\n\", wordBreak(s1, dict1, size1)); // 应输出1(true) // 测试用例2:s=\"catsandog\", wordDict=[\"cats\",\"dog\",\"sand\",\"and\",\"cat\"] char* s2 = \"catsandog\"; char* dict2[] = {\"cats\", \"dog\", \"sand\", \"and\", \"cat\"}; int size2 = 5; printf(\"Test3: %d\\n\", wordBreak(s2, dict2, size2)); // 应输出0(false) return 0; // 程序正常退出}输出结果:
问题二:最大黑方阵——边界条件的拓扑博弈
给定一个整数数组 nums,每次操作中选择一个数,删除它并获得它的点数,同时删除所有等于它的前一个和后一个数。目标是找到可以获得的最大点数。例如,输入 nums = [3,4,2],输出为6,因为删除4得到4点数,同时删除3,然后删除2得到2点数,总点数6。
🔍 问题本质
在二值方阵(0=黑,1=白)中,寻找四条边全黑的最大子方阵。输出左上角 (r,c)(r,c) 和边长 sizesize。
⚙️ 算法核心:预处理的边界艺术
预处理:连续黑像素矩阵
-
构建两个辅助矩阵:
-
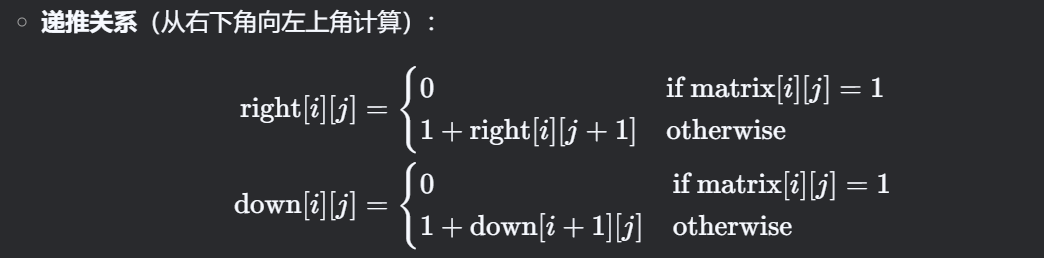
right[i][j]:从 (i,j)(i,j) 向右的连续黑像素数。 -
down[i][j]:从 (i,j)(i,j) 向下的连续黑像素数。
-
-
-
逆向枚举 + 边界验证
-
Step 1: 从大到小枚举边长 ss(从 min(N,M)min(N,M) 递减到 1)。
-
Step 2: 对每个 ss,枚举左上角 (r,c)(r,c):
-
验证四条边:
-
上边:从 (r,c)(r,c) 向右需 ≥s≥s 个黑像素 → 检查 right[r][c]≥sright[r][c]≥s。
-
下边:从 (r+s−1,c)(r+s−1,c) 向右需 ≥s≥s 个黑像素 → 检查 right[r+s−1][c]≥sright[r+s−1][c]≥s。
-
左边:从 (r,c)(r,c) 向下需 ≥s≥s 个黑像素 → 检查 down[r][c]≥sdown[r][c]≥s。
-
右边:从 (r,c+s−1)(r,c+s−1) 向下需 ≥s≥s 个黑像素 → 检查 down[r][c+s−1]≥sdown[r][c+s−1]≥s。
-
-
若满足,返回 [r,c,s][r,c,s](按题目要求选择最小 r,cr,c)。
-
-
-
时空复杂度
-
时间:O(N3)O(N3)(枚举边长 O(N)O(N) × 枚举位置 O(N2)O(N2))。
-
空间:O(N2)O(N2)(存储
right和down矩阵)。
-
-
🎯 关键洞见
边界拓扑学:将“四条边全黑”的条件拆解为四个边界点的连续性验证。预处理矩阵如同绘制像素流向地图,使边界检查降至 O(1)O(1) 时间。
详细分析:
频率统计:统计每个数值在数组中的出现次数,并计算每个数值的总点数(数值 × 次数)。
动态规划:定义一个数组 dp,其中 dp[i] 表示处理到数值 i 时的最大点数。
状态转移:dp[i] = max(dp[i-1], dp[i-2] + points[i])。
验证示例:
示例1:输入 nums = [3,4,2],输出为6。
删除4,获得4点数,同时删除3。
删除2,获得2点数,总点数为6。
示例2:输入 nums = [2,2,3,3,3,4],输出为9。
删除3,获得3 × 3 = 9点数,同时删除2和4。
总点数为9。
结果计算:dp[max_num] 即为最大点数。
题目程序:
#include // 标准输入输出头文件#include // 标准库头文件,包含动态内存分配函数#include // 字符串处理头文件// 辅助函数:返回两个整数中的较大值int max(int a, int b) { return a > b ? a : b; // 三元运算符实现比较}// 主功能函数:计算可获得的最大点数int deleteAndEarn(int* nums, int numsSize) { if (numsSize == 0) return 0; // 空数组直接返回0 // 步骤1:找出数组中的最大值 int max_num = 0; // 初始化最大值为0 for (int i = 0; i max_num) { max_num = nums[i]; // 更新最大值 } } // 步骤2:创建并初始化点数数组(长度max_num+1) int* points = (int*)calloc(max_num + 1, sizeof(int)); // 使用calloc初始化为0 // 统计每个数字的点数(数值×出现次数) for (int i = 0; i = 1) { dp[1] = max(points[0], points[1]); // 数字0和1的最大值 } // 动态规划状态转移 for (int i = 2; i <= max_num; i++) { // 状态转移方程:dp[i] = max(不选当前数字, 选当前数字) dp[i] = max(dp[i - 1], dp[i - 2] + points[i]); } int result = dp[max_num]; // 保存最终结果 // 步骤4:释放动态分配的内存 free(points); // 释放点数数组 free(dp); // 释放dp数组 return result; // 返回最大点数}// 测试函数int main() { // 测试用例1:nums = [3,4,2] 预期结果:6 int nums1[] = {3, 4, 2}; int size1 = sizeof(nums1) / sizeof(nums1[0]); printf(\"Test1: %d\\n\", deleteAndEarn(nums1, size1)); // 应输出6 // 测试用例2:nums = [2,2,3,3,3,4] 预期结果:9 int nums2[] = {2, 2, 3, 3, 3, 4}; int size2 = sizeof(nums2) / sizeof(nums2[0]); printf(\"Test2: %d\\n\", deleteAndEarn(nums2, size2)); // 应输出9 // 测试用例3:nums = [1,1,1,2,4,5,5,5,6] 预期结果:18 int nums3[] = {1, 1, 1, 2, 4, 5, 5, 5, 6}; int size3 = sizeof(nums3) / sizeof(nums3[0]); printf(\"Test3: %d\\n\", deleteAndEarn(nums3, size3)); // 应输出18 return 0; // 程序正常退出}输出结果: 
算法对比:数据压缩 VS 边界拓扑
下表揭示二者本质差异:
思维升华:算法设计的二元论
-
时空权衡的辩证法
-
最大子矩阵:牺牲时间(O(N2M)O(N2M))换取空间效率(O(M)O(M))。
-
最大黑方阵:牺牲空间(O(N2)O(N2))换取验证效率(O(1)O(1) 边界检查)。
-
-
问题转化的艺术
-
子矩阵:通过行压缩将二维问题化为一维动态规划,体现分治思想。
-
黑方阵:通过连续性预处理将几何约束转为查表操作,体现预计算智慧。
-
-
应用场景启示
-
最大子矩阵:适用于数值型数据挖掘(如股票收益热区分析)。
-
最大黑方阵:适用于二值图像处理(如二维码边框检测)。
-
终极洞见:矩阵是数据的战场,算法是指挥的艺术。最大子矩阵是“集中优势兵力攻其一点”,最大黑方阵是“严守边关拒敌门外”。
博客结语
穿过矩阵迷宫的双子星,我们目睹了算法设计的极致美学:一个用降维打击撕裂高维混沌,一个用边界拓扑编织完美牢笼。它们的对决没有胜负——唯有在问题宇宙中的交相辉映。当你下次面对矩阵时,请记住:
所有复杂问题,皆可拆解为简单世界的投影;所有边界约束,皆是拓扑流动的凝固瞬间。
明日探险预告:《图论中的暗物质:最大流与最小割的量子纠缠》——我们不见不散!

