CoordField:低空城市场景中用于代理型无人机任务分配的协调场_coordfield: coordination field for agentic uav tas
张腾超 1{ }^{1}1,田永林 2{ }^{2}2,林飞 1{ }^{1}1,黄军 1{ }^{1}1,秦睿 3{ }^{3}3,王飞跃 4,1{ }^{4,1}4,1 †
摘要
随着对异构无人机(UAV)集群在城市环境中执行复杂任务的需求不断增加,系统设计现在面临着重大挑战,包括高效语义理解、灵活任务规划以及动态调整协调策略以应对不断变化的环境条件和持续变化的任务需求的能力。为了解决现有方法的局限性,本文提出了一种基于协调场的代理型系统,用于在复杂的都市场景中协调异构无人机集群。在该系统中,大型语言模型(LLM)负责解释高层人类指令,并将其转换为无人机集群可执行的命令,例如巡逻和目标跟踪。随后,提出了一种协调场机制来指导无人机运动和任务选择,从而实现去中心化和适应性的突发任务分配。在二维仿真空间中对不同模型进行了50轮对比测试,以评估其性能。实验结果表明,所提出的系统在任务覆盖率、响应时间和对动态变化的适应性方面表现出优越的性能。
I. 引言
部署无人机群以执行诸如行人检测、车辆跟踪和交通信号监控等任务在复杂动态的城市环境中的需求日益增长,这突显了多无人机系统相较于单个无人机在覆盖范围、系统冗余和操作效率方面的优势。然而,任务的复杂性和城市环境的高度动态性也带来了显著挑战。在这种设置下,有效的任务分配需要系统能够持续重新分配无人机到新任务,适应无人机故障和任务优先级的变化,并在无需依赖集中控制的情况下实现去中心化的智能协调。
为了解决这些挑战,已经开发了各种用于无人机群协调的优化算法,例如灰狼优化器 [1] 和鲸鱼优化算法 [2]。然而,这些方法通常针对特定类型的任务,并且难以适应在高度动态环境中运行的异构无人机集群。随着大型语言模型(LLM)的兴起,最近的研究探索了利用其强大的语义理解和工具调用能力来解决这些问题。例如,一些方法试图利用现有的模型,通过少量示例或零样本学习方法,使LLM能够进行多轮规划、行程校准和执行 [3],[4]。然而,当处理复杂且快速变化环境中的多任务时,这些方法仍表现出显著的局限性。
为了解决上述挑战,新兴的代理型人工智能(AI)提供了一种更灵活和统一的方法 [5]。这种范式由LLM驱动,并将任务分解、工具调用和多代理协调与调度等功能集成到一个连贯的系统中 [6],[7]。在本文中,我们提出了一个基于协调场的多无人机代理型系统架构。该系统利用LLM将自然语言指令解析为无人机群可执行的任务,并采用协调场控制策略以实现面向任务的自主导航和集体协调。
本工作的主要贡献如下:
- 我们提出了CoordField,一种基于协调场的无人机群任务分配方法,该方法使用连续更新的势场表示城市环境中的任务紧急程度和无人机影响。这种方法增强了实时响应能力。
-
- 我们提出了一种无人机群代理型系统,该系统可以从自然语言描述中实现高精度的任务理解,并通过具有不同角色的专门协作代理支持动态规划和部署。
-
- 我们在相同的任务场景下对多个基线模型进行了评估,验证了该系统在城市环境中优越的协调性能。
1{ }^{1}1 对应作者:王飞跃 (电子邮件: feiyue.wang@ia.ac.cn)。
本工作部分由澳门特别行政区(SAR)科技发展基金资助(0145/2023/RIA3, 0093/2023/RIA2, 0157/2024/RIA2),并得到天津大学复杂管理系统计算与分析实验室项目支持。
2{ }^{2}2 张腾超、林飞和黄军隶属于澳门科技大学创新工程学院工程科学系,澳门999078,中国(电子邮件: [zhangtengchao, feilin, junhuang] @ieee.org)。
3{ }^{3}3 田永林隶属于中国科学院自动化研究所多模态人工智能系统国家重点实验室,北京100190,中国(电子邮件: yonglin.tian@ia.ac.cn)。
4{ }^{4}4 秦睿隶属于中国科学院自动化研究所多模态人工智能系统国家重点实验室,北京100190,中国,同时隶属于天津大学复杂管理系统计算与分析实验室,天津300072,中国(电子邮件: mi.qin@ia.ac.cn)。
4,1{ }^{4, 1}4,1 王飞跃隶属于中国科学院大学中国经济与社会保障研究中心,北京100190,同时隶属于澳门科技大学创新工程学院工程科学系,澳门999078,中国(电子邮件: feiyue.wang@ia.ac.cn)。
II. 基础知识
A. 代理型系统
近年来,代理型人工智能(AI)作为一种新的智能范式出现,其特征在于自主感知、目标驱动规划和自适应决策,为多代理协作任务提供了创新和有效的解决方案 [8],[9]。与传统的被动方法不同,代理型AI强调代理的持续目标追求、上下文记忆、自适应工具使用和自我反思能力 [10]。这些能力使代理能够在动态环境中以更大的自主性和协调性运作。由LLM驱动的代理系统展示了强大的推理和规划能力,特别是在复杂任务分解和顺序执行方面 [3]。这些特性为构建自主多无人机系统提供了坚实的理论和方法基础。在复杂的都市任务场景中 [11],代理型AI可以协助无人机理解高层指令、有效分配子任务,并快速重新配置协调策略以应对任务变化或代理故障,从而实现真正的自主协作。
B. 自然语言任务解析中的LLM
随着LLM在自然语言理解和通用推理方面的快速发展,LLM在处理模糊语义、条件逻辑和空间语言方面表现出了比传统基于规则的解析器更强的能力。即使在有限的领域特定数据下,它们在任务生成中也表现出强大的泛化能力。研究人员开发了几种框架,如Code-as-Policies和Prompt2Action [12],[13],使LLM能够将自然语言指令映射为可执行的任务代码。这些方法通常结合少量示例提示和约束提示以提高生成输出的有效性和安全性。此外,GSCE框架,包括指南、技能API、约束和示例,展示了提示工程在无人机任务规划中的实际价值 [14],通过提供技能API、操作约束和说明示例,引导LLM生成物理可行且符合约束的控制程序。
C. 基于场的协调与分配
场驱动方法,特别是人工势场(APF)方法,在移动机器人领域得到了广泛应用 [15]。在此方法中,目标点被建模为吸引源,障碍物为排斥源,机器人通过沿着结果势场的梯度下降进行导航,从而实现路径规划和实时避障。这种方法已被应用于交通流建模 [16],其中基于场的方法用于模拟交通动力学的演变。车辆被建模为受交通密度场、速度场和其他因素影响的粒子,从而使系统能够更有效地捕捉宏观和微观变化 [17]。
受此思路启发,我们的工作采用了类似策略,通过将任务需求和无人机工作负载建模为连续的空间场。根据任务紧急程度的分布,构建了一个动态演化的势场,通过局部梯度下降引导无人机移动和分配任务 [18]。该方法的优势在于其去中心化的结构、强实时适应性和对任务变化的高响应性,使其特别适合于任务分布不均且动态变化的城市场景。与传统的离散优化方法相比,场驱动方法提供了更灵活和可扩展的解决方案。
III. 方法
在本工作中,我们提出了一种基于协调场机制的无人机群代理型系统,以指导无人机运动和任务选择,实现突发任务的去中心化和适应性分配。所提出的代理型系统由三个主要模块组成,如图1所示。它实现了多层次代理协调,以解释自然语言输入并在城市环境中为无人机群进行任务分解和分配。特别是,为了解决无人机类型的异构性和城市交通条件的复杂性,采用了一种基于场的策略,以引导不同类型无人机前往与其操作角色相匹配的任务区域。
A. 语义理解模块
语义理解模块负责解释用户提供的自然语言输入,并将其转换为适合下游规划和执行的结构化任务表示。作为人机界面,它通过基于语言的命令实现与无人机群的直观交互,并确保高层次的语义信息准确传递给系统中的后续模块 [19]。
在接收到用户提示后,LLM执行任务翻译过程,将模糊或抽象的自然语言指令映射为形式化约束。具体而言,LLM处理输入以提取关键元素,如目标位置、任务类型和优先级水平,并最终生成以下形式的结构化任务元组:
Taskj=(xj,yj,wj, type j)\\operatorname{Task}_{j}=\\left(x_{j}, y_{j}, w_{j}, \\text { type }_{j}\\right)Taskj=(xj,yj,wj, type j)
其中(xj,yj)\\left(x_{j}, y_{j}\\right)(xj,yj)表示目标的空间坐标,wjw_{j}wj表示任务权重或优先级,type j{ }_{j}j指任务的语义类别(例如,巡逻、跟踪、检查)。
这一形式化过程充当了高层用户意图和代理型系统底层执行逻辑之间的桥梁。它使下游模块(如规划和执行模块)能够在一致和可量化的任务表示上运行。此外,该模块利用了LLM的强大语义理解和推理能力,为灵活的任务扩展和约束集成奠定了基础。
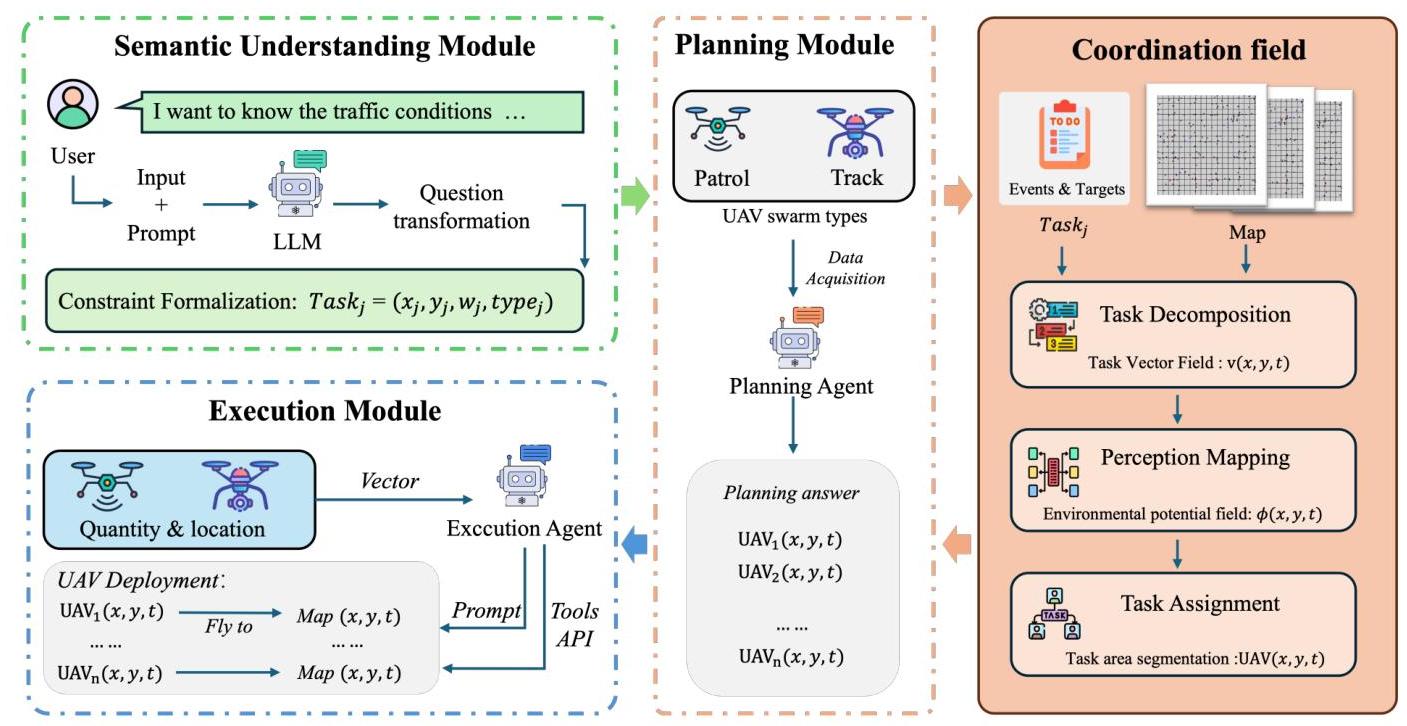
图1. 协调场代理型系统实施过程
B. 规划模块和协调场
规划模块负责将从语义解析获得的任务元组(xj,yj,wj,typej)\\left(x_{j}, y_{j}, w_{j}, \\operatorname{type}_{j}\\right)(xj,yj,wj,typej)转换为动态的无人机协调策略。规划代理首先将任务元组和无人机状态数据输入协调场。这个基于场的框架由三个子模块组成——感知映射、任务分解和任务分配——它们以闭环方式运行,以持续适应不断变化的任务需求和空间分布模式。结果由规划代理汇总并交付执行。
感知映射:规划代理首先读取相关地图信息和无人机配置,如类型、能力和数量。当在任何给定时间ttt出现任务时,规划代理将相关任务分组,并识别出一组活跃任务,每个TaskjT a s k_{j}Taskj位于位置(xj,yj)\\left(x_{j}, y_{j}\\right)(xj,yj),并具有动态紧急权重wj(t)w_{j}(t)wj(t)。
为了建立对环境中任务密度的意识,我们构造了一个随时间变化的势场ϕ(x,y,t)\\phi(x, y, t)ϕ(x,y,t),以表示高优先级任务区域的空间强度和分布。这个标量场由加权高斯函数之和组成,定义为:
ϕ(x,y,t):=∑j=1Mwj(t)⋅exp(−∥(x,y)−(xj(t),yj(t))∥22σj2)\\phi(x, y, t):=\\sum_{j=1}^{M} w_{j}(t) \\cdot \\exp \\left(-\\frac{\\left\\|(x, y)-\\left(x_{j}(t), y_{j}(t)\\right)\\right\\|^{2}}{2 \\sigma_{j}^{2}}\\right)ϕ(x,y,t):=∑j=1Mwj(t)⋅exp(−2σj2∥(x,y)−(xj(t),yj(t))∥2)
这里,σj\\sigma_{j}σj表示任务jjj的空间影响半径,反映了其紧急程度在附近区域的传播程度。值得注意的是,建筑物等障碍物被排除在场域之外,且ϕ(x,y,t)\\phi(x, y, t)ϕ(x,y,t)在这些区域内明确设为零。
通过构建这个连续的“任务景观”,无人机能够感知并利用ϕ(x,y,t)\\phi(x, y, t)ϕ(x,y,t)的梯度来识别并导航至高优先级任务区域。
任务分解:为了将标量势场ϕ\\phiϕ转换为无人机导航和控制的可行动导引,我们进一步构造了一个随时间变化的矢量场v(x,y,t)\\mathbf{v}(x, y, t)v(x,y,t),它代表了无人机群的速度场。在此过程中,基于流体力学中的Navier-Stokes方程定义了以下运动方程:
dvdt:=−1ρ∇p+ν∇2v+Ftask(ϕ)\\frac{d \\mathbf{v}}{d t}:=-\\frac{1}{\\rho} \\nabla p+\\nu \\nabla^{2} \\mathbf{v}+\\mathbf{F}_{\\mathrm{task}}(\\phi)dtdv:=−ρ1∇p+ν∇2v+Ftask(ϕ)
在这个模型中,v(x,y,t)=(vx,vy)\\mathbf{v}(x, y, t)=\\left(v_{x}, v_{y}\\right)v(x,y,t)=(vx,vy)表示2D空间中每一点的速度向量,指示无人机在给定位置应遵循的方向和大小。参数ν\\nuν表示流体粘度,它控制速度场的平滑性和响应性:更高的粘度会导致更平滑的流动但响应较慢。Ftask \\mathbf{F}_{\\text {task }}Ftask 是用于引导无人机进入ϕ\\phiϕ值较高的区域的外部力项,定义为:
Ftask =k∇ϕ\\mathbf{F}_{\\text {task }}=k \\nabla \\phiFtask =k∇ϕ
其中kkk是一个调整吸引力强度的比例系数。ρ\\rhoρ是名义流体密度,在本系统中可以简化为归一化。
通过构建这样的速度场,无人机不需要明确规划轨迹。相反,它们只需跟随局部流向,自然汇聚到高需求任务区域。同时,包含扩散项ν∇2v\\nu \\nabla^{2} \\mathbf{v}ν∇2v有助于防止无人机在一个区域过度集中,从而增强空间分布和系统鲁棒性。
任务分配:为进一步提高多个代理之间的协调效率,防止由于无人机聚集在同一任务区域而导致的资源冗余或执行冲突,我们在每个无人机周围引入了局部涡旋机制作为动态排斥控制策略。具体而言,每个无人机iii在其当前位置(xi,yi)\\left(x_{i}, y_{i}\\right)(xi,yi)处生成一个旋转场,定义为:
ωi(r):=Γi2πrexp(−(rr0)2)\\omega_{i}(r):=\\frac{\\Gamma_{i}}{2 \\pi r} \\exp \\left(-\\left(\\frac{r}{r_{0}}\\right)^{2}\\right)ωi(r):=2πrΓiexp(−(r0r)2)
其中rrr是从无人机iii的径向距离,r0r_{0}r0表示场的影响半径。Γi\\Gamma_{i}Γi是由无人机产生的环流强度,取决于其能力得分ci(t)c_{i}(t)ci(t)和局部势值ϕ(xi,yi,t)\\phi\\left(x_{i}, y_{i}, t\\right)ϕ(xi,yi,t),计算公式为:
Γi(t):=ci(t)⋅ϕ(xi(t),yi(t),t)∑j=1Ncj(t)\\Gamma_{i}(t):=\\frac{c_{i}(t) \\cdot \\phi\\left(x_{i}(t), y_{i}(t), t\\right)}{\\sum_{j=1}^{N} c_{j}(t)}Γi(t):=∑j=1Ncj(t)ci(t)⋅ϕ(xi(t),yi(t),t)
基于此场,系统计算出围绕每个无人机形成的切向速度分量vθ,i(r)v_{\\theta, i}(r)vθ,i(r),它形成了排斥速度并模拟了代理间避免动力学:
vθ,i(r):=Γi2πr(1−exp(−(rr0)2))v_{\\theta, i}(r):=\\frac{\\Gamma_{i}}{2 \\pi r}\\left(1-\\exp \\left(-\\left(\\frac{r}{r_{0}}\\right)^{2}\\right)\\right)vθ,i(r):=2πrΓi(1−exp(−(r0r)2))
最后,通过将全局引导速度场v(x,y,t)\\mathbf{v}(x, y, t)v(x,y,t)与所有无人机生成的叠加切向排斥速度相结合,得到每个无人机的控制速度向量:
vnew (x,y,t)=v(x,y,t)+∑i=1nvθ,i(x,y,t)v_{\\text {new }}(x, y, t)=v(x, y, t)+\\sum_{i=1}^{n} v_{\\theta, i}(x, y, t)vnew (x,y,t)=v(x,y,t)+i=1∑nvθ,i(x,y,t)
这种机制确保无人机不仅被引导到高优先级任务区域,还通过局部涡旋效应相互排斥,从而在完全去中心化的设置中实现动态稳定的任务分配和协调行为。因此,该系统实现了高适应性和强可扩展性。
C. 执行模块
执行模块的核心任务是将规划模块的输出,包括流场矢量vnew (x,y,t)\\mathbf{v}_{\\text {new }}(x, y, t)vnew (x,y,t)和无人机任务分配信息,转换为物理或模拟无人机可执行的实时控制命令。这一过程由执行代理管理,它通过标准化API接口与底层控制系统通信。
在任务执行阶段,每个无人机根据其当前位置(x,y,t)(x, y, t)(x,y,t)从预计算的控制场vnew (x,y,t)\\mathbf{v}_{\\text {new }}(x, y, t)vnew (x,y,t)中采样一个局部速度向量,并使用该向量作为其下一个导航方向。执行代理然后生成相应的飞行控制命令并通过中间件(如MAVSDK、ROS2或AirSim)将其派发到无人机平台(无论是物理还是虚拟)。这些控制命令可以形式化为:
UAV(x,y,t)→Map(x′,y′,t′)\\operatorname{UAV}(x, y, t) \\rightarrow \\operatorname{Map}\\left(x^{\\prime}, y^{\\prime}, t^{\\prime}\\right)UAV(x,y,t)→Map(x′,y′,t′)
这将当前状态映射到一个新的目标位置和时间步长。
根据任务类型type j{ }_{j}j,无人机被分配不同的执行模式,例如执行区域巡逻或跟踪特定目标。这些操作差异在指令生成期间嵌入命令结构中,并反映在API参数中。
为了在动态环境中保持适应性,每个无人机持续向控制系统报告其状态,包括位置、速度和执行状态。这些更新用于实时刷新任务势场ϕ(x,y,t)\\phi(x, y, t)ϕ(x,y,t)和流场矢量v(x,y,t)\\mathbf{v}(x, y, t)v(x,y,t)。当环境发生变化时,例如出现新的任务目标、完成当前任务或引入障碍物时,系统重新计算相关场并通过执行代理交付更新的控制指令。
这个闭环感知-规划-执行循环以高频运行,确保系统表现出强烈的响应性和去中心化的动态协调。在这种机制下,无人机能够在复杂和不断变化的环境中重新规划、合作避障和目标适应,从而实现真正适应性的智能行为。
IV. 实验
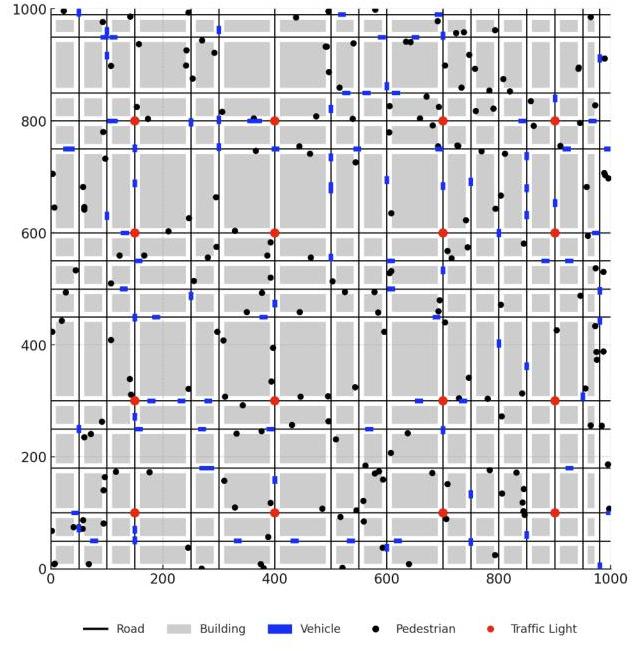
图2. 2D空间模拟地图。
为了验证所提出的架构,我们在一个模拟的城市环境中进行了一系列实验。我们首先介绍模拟环境的构建、无人机群配置、任务生成过程(包括自然语言指令解析)以及用于比较的基线方法。然后描述性能评估指标和测试程序。最后,我们展示了来自各种实验场景的结果,以证明系统在任务覆盖率、负载平衡和响应延迟方面的有效性。
A. 环境和无人机配置
研究在定制设计的二维城市模拟环境中进行,覆盖一个1000×10001000 \\times 10001000×1000网格空间,如图2所示。环境特征为结构化的城市道路网络,灰色区域代表密集分布的建筑物。红点标记位于道路交叉口的交通灯,而大量黑点和蓝矩形分别表示动态移动的行人和车辆。道路布局与城市网格对齐,为多代理互动和协调创造了复杂的交通和行人流动环境。
在此环境中,无人机在道路网络上方的空域内操作,并保持一致的安全飞行高度,以简化操作并确保任务执行的一致性。模拟中总共部署了20架无人机,分为两种类型:巡逻无人机和跟踪无人机,各10台。虽然这两种类型具有相同的飞行性能特征,但在传感和识别能力上有所不同。巡逻无人机更适合大面积扫描和异常检测任务,而跟踪无人机则专为精确跟随特定目标而设计。每架无人机都被分配了一个能力向量ci(t)\\mathbf{c}_{i}(t)ci(t),动态表示其对不同类型任务的适应性。
为了增强模拟的动态性和复杂性,环境以时间步长TTT实时更新,允许准确建模行人的移动和车辆,以及交通信号状态的变化。任务指令通过自然语言输入发布,例如“请检查人群和车辆。” 这些指令通过DeepSeek API解析,该API解释自然语言输入并将其转换为结构化任务信息,包括目标位置、任务类型和优先级等参数。
B. 实验结果与分析
为了验证所提出系统的有效性,进行了一系列系统的实验评估,并展示了关键结果的代表性可视化。如图3所示,热图展示了城市环境中任务密度的分布。红色和黄色区域表示任务热点,反映了任务需求较高的区域,系统会根据这些区域动态重新分配无人机资源。
图4展示了优化后的无人机轨迹。每条蓝色轨迹连接一个起点(绿色三角形)到一个任务目标(红色圆圈),展示了基于最小旅行距离的全局路径优化效果。结果显示,无人机高效覆盖多个任务点,同时保持合理的空间分布,从而避免拥堵和冲突。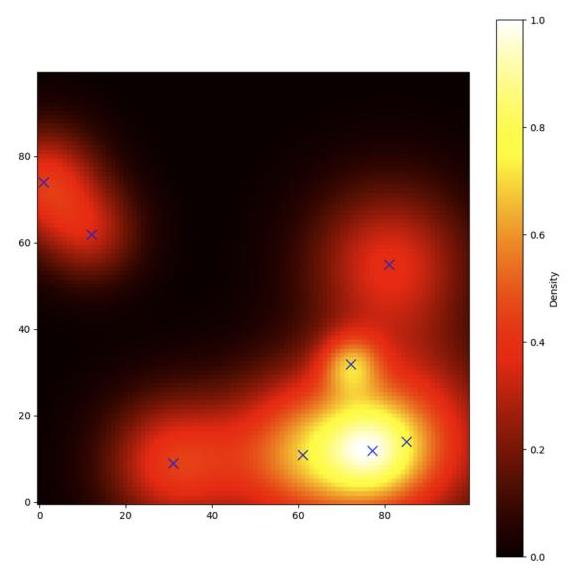
图3. 带热点的密度图。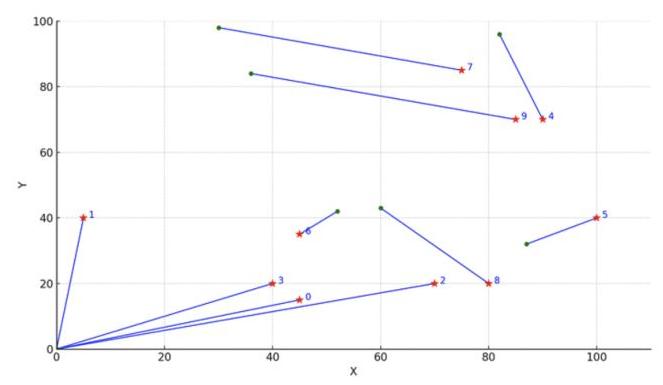
图4. 无人机任务分配轨迹路线。
实验评估指标包括以下四个方面:
- 任务解析准确性(TPA):该指标衡量正确解析为结构化任务表示的自然语言指令的比例。它反映了系统解释高层人类命令的能力,这对于实现直观的人机交互和确保下游执行的准确性至关重要。
- 覆盖效率(CE):该指标量化了无人机有效覆盖由任务势场ϕ(x,y,t)\\phi(x, y, t)ϕ(x,y,t)定义区域的程度。它计算为无人机覆盖区域与总任务定义区域之间的比率。高覆盖效率表明系统在空间分布和响应任务紧急性方面的有效性。
- 任务负载平衡(TLB):该指标评估任务负载在所有无人机之间分布的均匀性,使用任务分配密度梯度∇ρ\\nabla \\rho∇ρ的范数。均衡负载可以防止个别无人机过载,减少任务冗余,并确保系统在动态环境中的鲁棒性。
- 无人机利用率(UUR):该指标表示相对于总可用机队,积极参与任务执行的无人机比例。更高的利用率反映了高效的代理协调和资源部署,这对于最大化任务效果和运营经济至关重要。
表I
跨模型的任务性能指标比较
模型版本:Deepseek-v3 (25.03.24),GPT-4o (24.05.13),Claude-3-7-Sonnet (25.02.19),LLaMA-4-Scout (25.04.05),Gemini-2.5-ProPreview (25.03.25)。
对50个自然语言命令任务的实验评估表明,所提出的协调场代理型系统在多个关键性能指标上优于所有基线模型,如表1所示。具体而言,它实现了最高的TPA 96%96 \\%96%,显著超过了GPT-4o(74%)[20]、Claude-3-7-Sonnet(76%)[21]和Deepseek-v3(70%)[22],表明其在将非结构化命令转换为可执行无人机指令方面的卓越语义理解和稳健性。在CE方面,系统平均保持率为95%95 \\%95%,始终优于其他模型,如GPT40(85%)和LLaMA-4-Scout(79%)[23],即使在超过80%有效覆盖率的任务突发场景下仍然高度可靠。关于TLB,我们的方法显示出最低的任务分布偏差仅为0.8,相比之下Deepseek-v3和Claude-3-7-Sonnet分别为2.1和1.6,显著减少了资源聚集并增强了空间协调。此外,UUR达到97%97 \\%97%,确认大多数无人机始终保持积极参与任务执行,而竞争模型如GPT-4o和LLaMA-4-Scout低于85%85 \\%85%。这些结果共同验证了系统在复杂城市环境中管理异构无人机群的强大协调能力、动态适应性和整体效率。
V. 结论
本文提出了一种用于无人机任务协调的协调场代理型系统。该系统展示了效率、稳定性和适应性,能够实时解析自然语言指令并通过势场、基于流体的速度场和基于涡旋的引导实现高效任务分配。实验结果验证了其在复杂和动态城市环境中的优越性能。未来的工作计划将系统扩展到三维场景和现实世界的无人机群。
参考文献
[1] 杨健,颜芳,张杰,彭冲,“混合混沌游戏和灰狼优化算法用于无人机路径规划”,《应用数学建模》,p. 115979,2025年。
[2] 徐涛,陈超,“Dbo-AWOA:一种适用于全局优化和无人机3D路径规划的自适应鲸鱼优化算法”,《传感器》,第25卷,第7期,p. 2336,2025年。
[3] 宋承浩,吴静,华盛顿C,萨德勒B.M,赵伟良,苏毅,“LLM-Planner:基于大型语言模型的少量示例接地规划”,《IEEE/CVF国际计算机视觉会议论文集》,2023年,pp. 2998-3009。
[4] 黄晟,江志,董浩,乔宇,高鹏,李昊,“Instruct2act:将多模态指令映射到机器人动作的大型语言模型”,arXiv预印本arXiv:2305.11176,2023年。
[5] 阿查里亚D.B,卡潘K,迪维娅B,“代理型AI:复杂目标的自主智能—全面调查”,《IEEE Access》,2025年。
[6] 邱佳,林凯,李刚,阿查里亚A,黄旺,达兹A,袁卫,托波尔E.J,“医学和医疗保健中的LLM型代理系统”,《自然机器智能》,第6卷,第12期,pp. 1418-1420,2024年。
[7] 徐伟,梁志,梅科,高海,谭靖,张洋,“A-MEM:代理型记忆用于LLM代理”,arXiv预印本arXiv:2502.12110,2025年。
[8] 陈伟,苏毅,左健,杨晨,袁辰,钱成,陈昌明,秦勇,卢毅,谢锐等,“Agentverse:促进多代理协作和探索代理的涌现行为”,arXiv预印本arXiv:2308.10848,第2卷,第4期,p. 6,2023年。
[9] Tran K.T,道D,阮M.D,范Q.V,奥沙利文B,阮H.D,“多代理协作机制:LLM的调查”,arXiv预印本arXiv:2501.06322,2025年。
[10] 辛恩,卡萨诺F,戈皮纳特A,纳拉辛汉K,姚思,“反射:带有动词强化学习的语言代理”,《神经信息处理系统进展》,第36卷,pp. 8634-8652,2023年。
[11] 田勇,林飞,李远,张腾,张青,傅祥,黄军,戴晓,王艳,天辰等,“无人机遇见LLM:代理型低空机动的综述与展望”,arXiv预印本arXiv:2501.02341,2025年。
[12] 梁杰,黄伟,夏凡,许鹏,豪斯曼K,伊希特B,佛罗伦萨P,曾安,“代码即政策:用于实体控制的语言模型程序”,2023年《IEEE国际机器人与自动化会议》(ICRA)。IEEE,2023年,pp. 9493-9500。
[13] 梁毅,吴超,宋涛,武伟,夏毅,刘阳,欧颖,陆松,纪磊,毛帅等,“TaskMatrix.ai:通过连接基础模型与数百万API完成任务”,《智能计算》,第3卷,p. 0063,2024年。
[14] 王伟,李毅,焦亮,袁锦,“GSCE:一种具有增强推理能力的可靠LLM驱动无人机控制提示框架”,arXiv预印本arXiv:2502.12531,2025年。
[15] 范鑫,郭勇,刘浩,魏斌,吕伟,“改进的人工势场法应用于AAV路径规划”,《数学工程问题》,第2020卷,第1期,p. 6523158,2020年。
[16] 罗斯塔米S.M.H,桑贾哈A.K,王俊,刘翔,“使用改进的人工势场算法实现移动机器人避障”,《EURASIP无线通信与网络杂志》,第2019卷,第1期,pp. 1-19,2019年。
[17] 郝光,吕倩,黄志,赵浩,陈威,“基于改进人工势场法的无人机路径规划”,《航空航天》,第10卷,第6期,p. 562,2023年。
[18] 潘哲,张诚,夏勇,熊晖,邵兴,“一种改进的人工势场法用于多无人机系统的路径规划和编队控制”,《IEEE电路与系统II:简报》,第69卷,第3期,pp. 1129-1133,2021年。
[19] 许盛,吴震,赵浩,舒鹏,刘志,廖巍,李松,西科拉A,刘涛,李霞,“推理前比较:用于领域专业化文本分析的LLM增强语义相似度度量”,arXiv预印本arXiv:2402.11398,2024年。
[20] 赫斯特A,勒雷尔A,古彻A.P,佩雷尔曼A,拉梅什A,克拉克A,奥斯特罗A,韦利欣达A,海耶斯A,拉德福德A等,“GPT-4O系统卡”,arXiv预印本arXiv:2410.21276,2024年。
[21] Anthropic,“Claude 3模型卡”,https://www.anthropic.com/news/ claude-3,2024年3月,访问日期:2025年4月30日。
[22] 毕翔,陈东,陈刚,陈胜,戴丹,邓超,丁浩,董科,杜强,付志等,“Deepseek LLM:以长远主义扩展开源语言模型”,arXiv预印本arXiv:2401.02954,2024年。
[23] Al M,“Llama 4 Herd:本土多模态智能新时代的开端”,https://ai.meta.com/blog/ llama-4-multimodal-intelligence/,2025年,访问日期:2025年4月30日。
参考论文:https://arxiv.org/pdf/2505.00091

