机器人 - 机器人学导论(2)空间描述和变换
目录
一、空间描述和变换
1.1 描述
1.位置描述
2.姿态描述
3.坐标系的描述
1.2 映射
1.平移坐标系的映射
2.旋转坐标系的映射
3.关于一般坐标系的映射
1.3 算子
1.平移算子
2.旋转算子
1.4 变换算法
1.混合变换
一、空间描述和变换
1.1 描述
1.位置描述
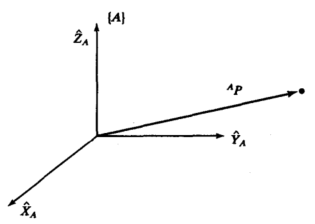
描述位置需要坐标系,可以用3x1的位置矢量对空间中的点进行描述,但是需要标注是在哪个坐标系,一般用左上标来标志,如
,表示P点在A坐标系中
在坐标系A中,用矢量来表示P,如

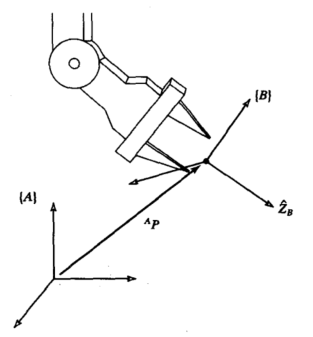
2.姿态描述
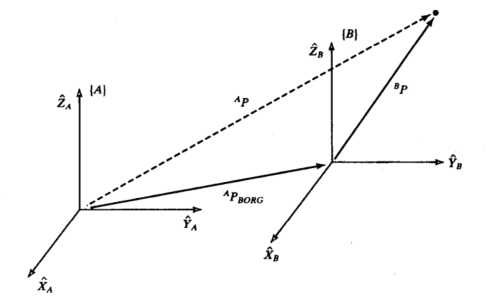
利用坐标系B原点位置相对于坐标系A的位置,来描述执行器“到了哪”,
利用B坐标系中的三轴,来确定执行器“转了多少”,
这里首先用
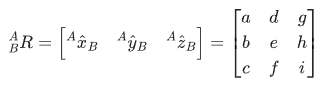
来表示B坐标系三轴的单位矢量,接着用A坐标系表达,则可以写为
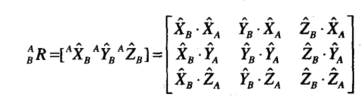
这时候可以列出一个3x3的矩阵,
首先,称这个矩阵为旋转矩阵,表示B相对于A的状态;
这部分,先不看那个A,可以认为是执行器,相对于A的状态;
展开之后,就是投影到A坐标系上面去;
PS:
对了,单位矢量的点积可以反映出余弦角,
因为,然后单位矢量模又为1,直接得出
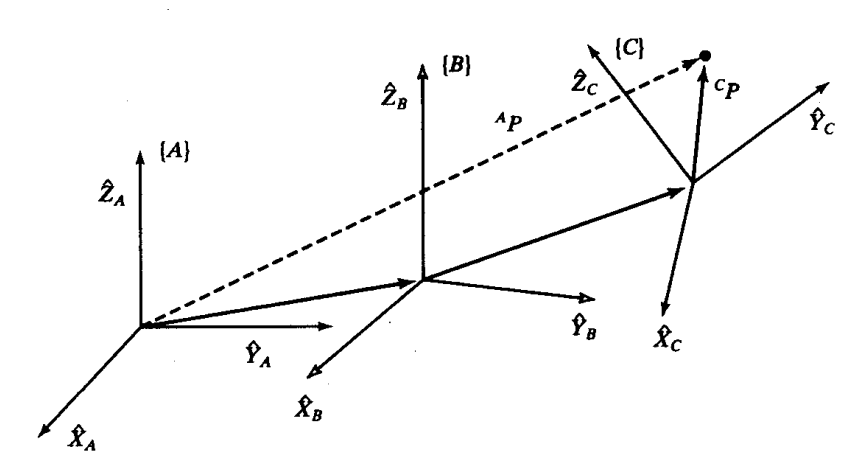
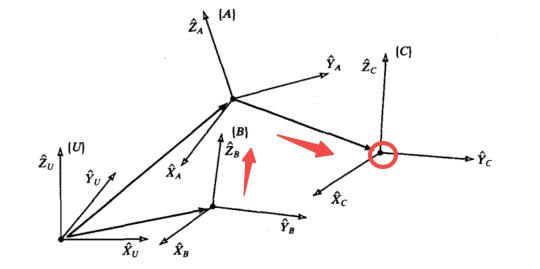
3.坐标系的描述
这里我个人的认为是ABC三个坐标系,分别可以表示为关节1(B),关节2(A),执行器(C),
并且可以根据这些坐标系各自的单位矢量,来了解它们之间的夹角余弦值(利用点积)
1.2 映射
1.平移坐标系的映射
最开始我们是在【B】坐标系中用
来描述点的位置,
用来描述【B】原点对于【A】的位置,
假设此时【A】【B】的姿态相同时(就像是平移过去),
这时候可以用来描述点的位置(向量加法)
2.旋转坐标系的映射
假如我们现在站在【A】坐标轴上,但是此时【A】【B】姿态不同(我们人是正的,机器人歪歪扭扭躺那里),此时我们需要用【B】的三个单位轴向量,在【A】上的坐标,来表示这个机器人有多“歪”;
假如说,现在我们站着,我们脚底下坐标轴为【A】,对面有台电动车也“站”着,它“脚底下”的坐标轴为【B】,此时一阵大风给它刮倒了,【B】“歪了”;
我们先定义一下【A】【B】坐标系中的单位矢量
假设,这里
在坐标系【A】中表示为
同理,y和z表示在【A】中表示为
,
那么,我们似乎可以得到一个对应关系,是个3x3的矩阵,也就是旋转矩阵;
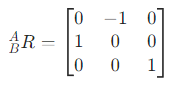
假如这里的旋转矩阵为:
然后【B】上有一点,假设是电动车的油门吧,为
(在【B】点坐标系中),也就是,电动车说,它的油门在它坐标系中的
位置,
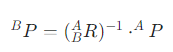
此时,我们要描述电动车油门对于我们的位置(在【A】坐标系中的位置),就可以
反过来,电动车想描述我们的右手在它【B】的位置,则可以用
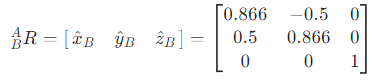
旋转矩阵:
可以看上面的1.1-2 姿态描述那部分
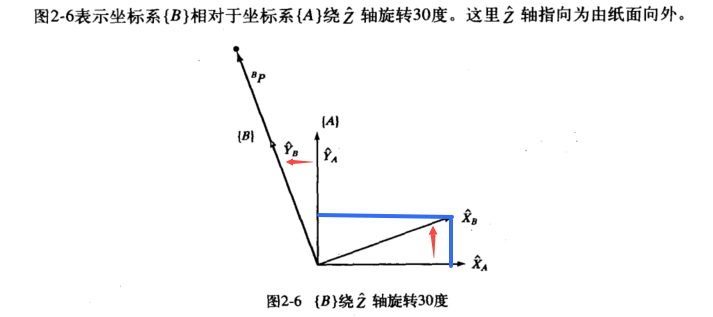
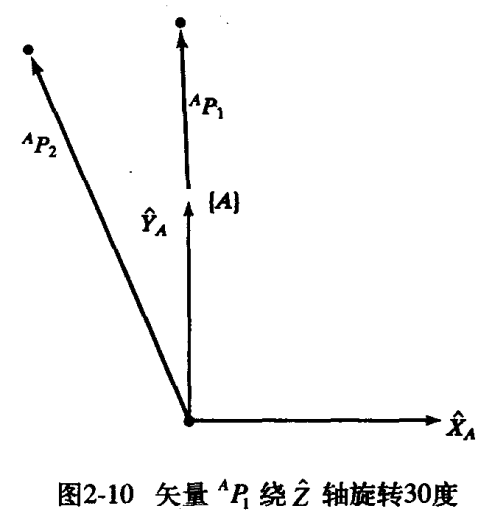
红色箭头表示转向,便于看...
因为绕z轴旋转,所以认为z轴不变,也就是
因为旋转了30°,此时,【B】坐标系中的x相对于【A】坐标系变成了
同理,【B】坐标系中的y相对于【A】坐标系变成了
然后就可以拿到旋转矩阵了...

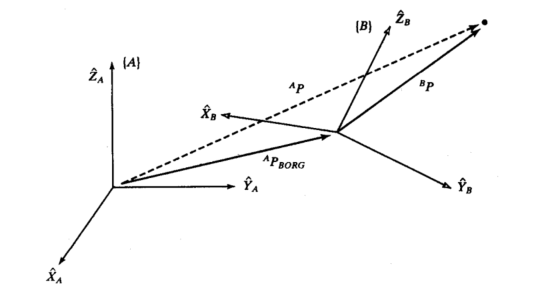
3.关于一般坐标系的映射
某个雨天,你站在路口,此时一个摩托佬骑着他的《得吃250SR》漂移过弯,但是因为雨天地滑,不慎侧滑摔出去了。此时怎么描述你和摩托佬...(或者他的《得吃250SR》)
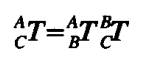
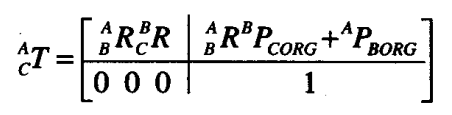
我们可以先旋转,再平移(因为摩托佬摔车了,坐标系歪了。摩托佬还漂移飞出去了,他和我们也不是原点重合);
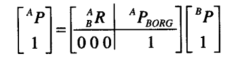
齐次变换矩阵:
利用这个让上面的“先旋转,再平移”看着简洁一些,也方便计算机处理;
这里是一个 4x4 的矩阵;
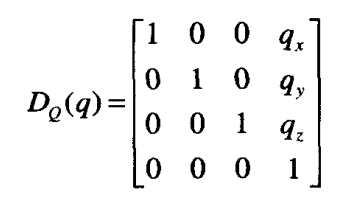
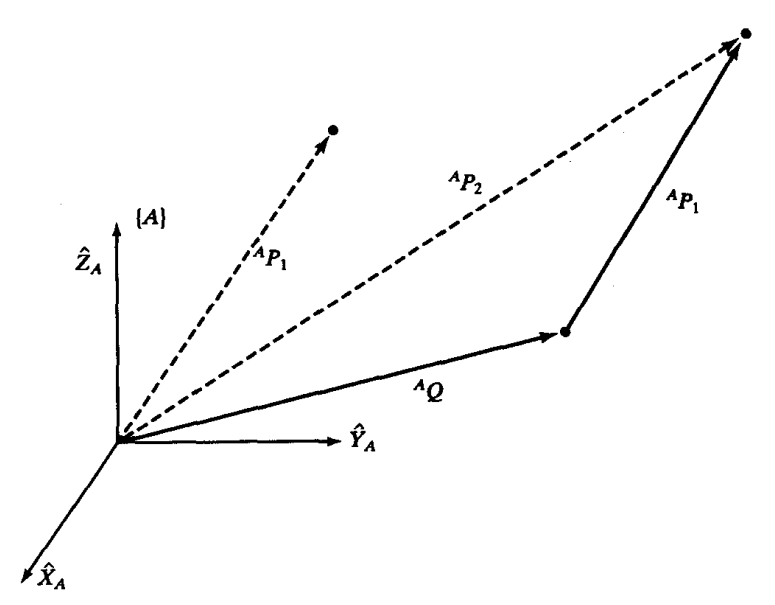
1.3 算子
1.平移算子
利用平移算子DQ来实现代替;
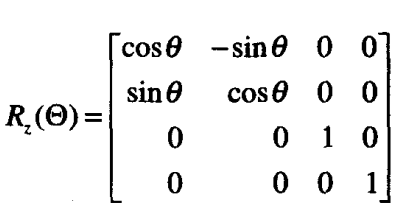
2.旋转算子
这里的是旋转算子,表示绕Z轴旋转θ度;
1.4 变换算法
1.混合变换
例如:
目前已知,要求