Sim2Real迁移机制在具身智能学习中的关键技术研究【附关键代码】
Sim2Real迁移机制在具身智能学习中的关键技术研究【附关键代码】
随着人工智能的发展,具身智能(Embodied Intelligence)逐渐成为机器人研究中的一个核心议题。它强调智能体不仅应具备感知和决策能力,还需与物理环境互动,通过“身体”实现学习与适应。具身智能不仅推动了机器人技术的升级,也为现实世界中的复杂任务带来了更多可能性。
本文将深入探讨具身智能与机器人技术融合的关键挑战与机遇,并通过代码示例展示如何在仿真环境中构建具身智能代理。
一、什么是具身智能?
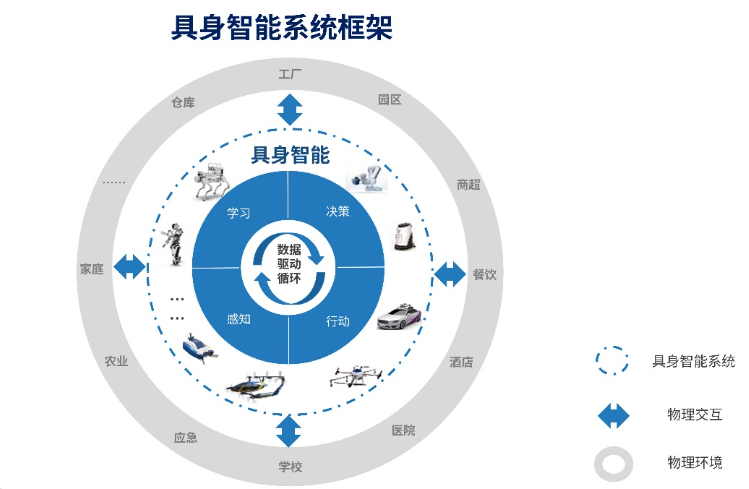
具身智能是一种集感知、运动、认知为一体的智能形式。相较于传统AI仅基于抽象数据进行推理,具身智能关注以下几点:
- 感知-运动耦合:智能体通过身体感知环境,并以此调整运动策略。
- 在线学习与适应:智能体在与环境交互过程中不断优化行为。
- 主动感知:不再是被动接收信息,而是主动探索以获取最有价值的信息。
应用领域包括仿人机器人、服务机器人、救援机器人以及复杂任务控制系统等。


