【数据集】【YOLO】【目标检测】航拍水面漂浮物识别数据集 4487 张,YOLO航拍水面垃圾识别算法实战训练教程,yolo无人机水面漂浮物识别毕业设计。_水面漂浮物数据集
一、数据集介绍
【数据集】航拍水面漂浮物识别数据集 4487 张,目标检测,包含YOLO/VOC格式标注。
数据集中包含 5 种分类,具体分类为:names: [\'other_plastic\', \'plastic_bag\', \'plastic_bottle\', \'plastic_cup\', \'plastic_package\'],分别为其他塑料, 塑料袋, 塑料瓶, 塑料杯, 塑料包装。
数据集图片来自国内外网站、网络爬虫、视频抽帧等;
可用于湖面、河道、海面进行水面漂浮物识别。
检测场景为湖面、河道、海面等,可以应用于治理水域污染,保障水域安全,实现水质的智能监测等。
文章底部名片或主页私信获取数据集~
1、数据概述
航拍水面垃圾识别的重要性
随着全球城市化进程加速,水域污染问题日益严峻。据统计,全球每年有超过800万吨塑料垃圾流入海洋,其中60%以上以漂浮物形式存在。中国内陆水域同样面临挑战,如长江、黄河等流域的塑料污染问题已引起广泛关注。传统人工巡查方式存在效率低、覆盖面窄、成本高等缺陷,而遥感技术受天气和分辨率限制,固定摄像头监控视角固定且易受光线干扰。在此背景下,基于深度学习的智能检测技术成为解决水面垃圾监测难题的关键突破口。
基于YOLO的无人机水面漂浮物识别算法
YOLO(You Only Look Once)系列算法凭借其端到端实时检测能力,在目标检测领域占据主导地位。相较于传统two-stage算法(如R-CNN系列),YOLO采用one-stage架构,直接通过单个神经网络完成目标定位与分类,极大提升了检测效率。最新一代YOLOv12在无人机河面塑料垃圾检测中展现出显著优势:
-
实时性突破:检测速度可达100FPS以上,延迟低于25毫秒,满足无人机实时巡查需求;
-
小目标检测优化:通过改进网络结构和训练策略,对塑料袋、瓶子等小型垃圾的识别准确率提升30%;
-
抗干扰能力:采用多尺度特征融合和注意力机制,有效区分水面反光、波浪与真实垃圾,误报率降低至5%以下。
该数据集含有 4487 张图片,包含Pascal VOC XML格式和YOLO TXT格式,用于训练和测试湖面、河道、海面等场景进行水面漂浮物识别。图片格式为jpg格式,标注格式分别为:
YOLO:txt
VOC:xml
数据集均为手工标注,保证标注精确度。
2、数据集文件结构
floatplasticwaste/
——test/
————Annotations/
————images/
————labels/
——train/
————Annotations/
————images/
————labels/
——valid/
————Annotations/
————images/
————labels/
——data.yaml
- 该数据集已划分训练集样本,分别是:test目录(测试集)、train目录(训练集)、valid目录(验证集);
- Annotations文件夹为Pascal VOC格式的XML文件 ;
- images文件夹为jpg格式的数据样本;
- labels文件夹是YOLO格式的TXT文件;
- data.yaml是数据集配置文件,包含无人机水面垃圾识别的目标分类和加载路径。


Annotations目录下的xml文件内容如下:
Frame-395_png.rf.2fe27b864d965d5876d4179c9e08dc32.jpgFrame-395_png.rf.2fe27b864d965d5876d4179c9e08dc32.jpgroboflow.com1280128030plastic_bottleUnspecified0008438812998plastic_cupUnspecified00011411196114512503、数据集适用范围
- 目标检测场景,监控摄像头识别,无人机视角
- yolo训练模型或其他模型
- 湖面、河道、海面等场景
- 可以用于治理水域污染,保障水域安全,实现水质的智能监测等。
4、数据集标注结果
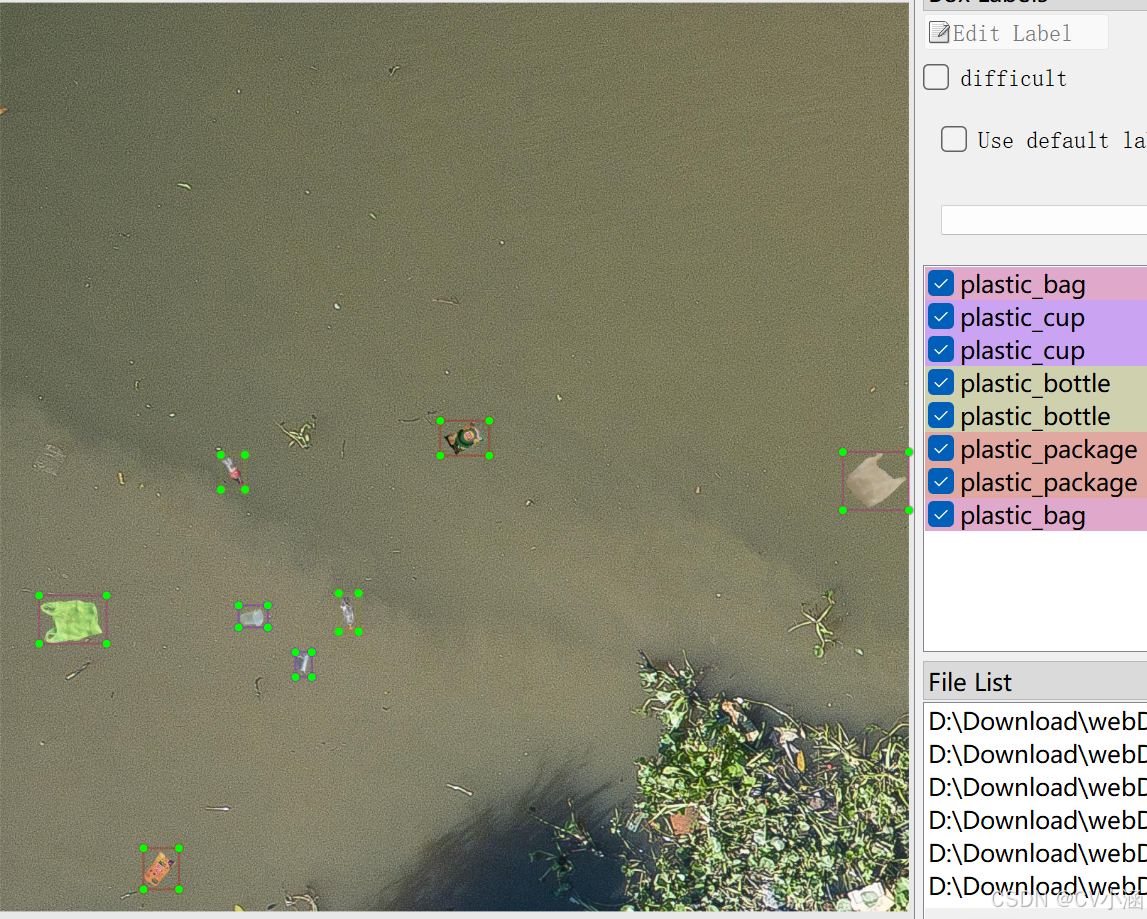
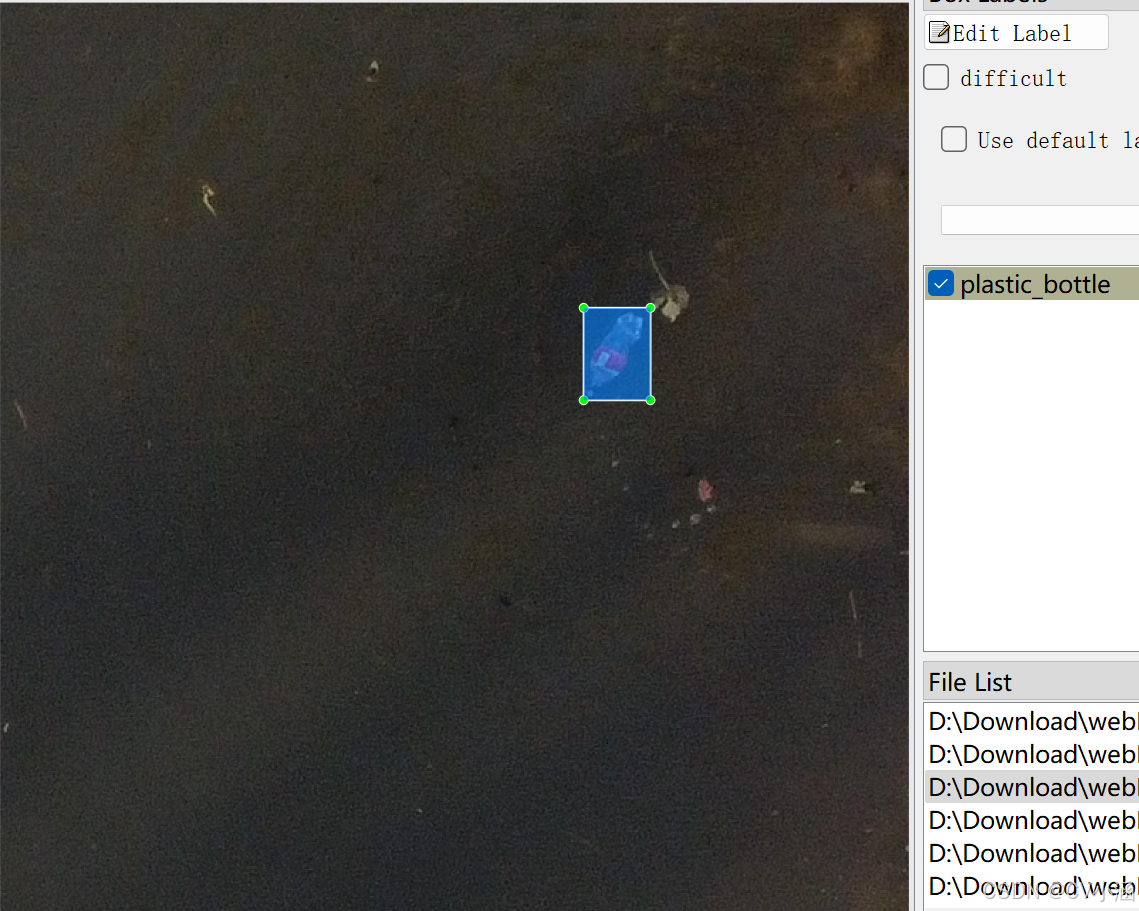
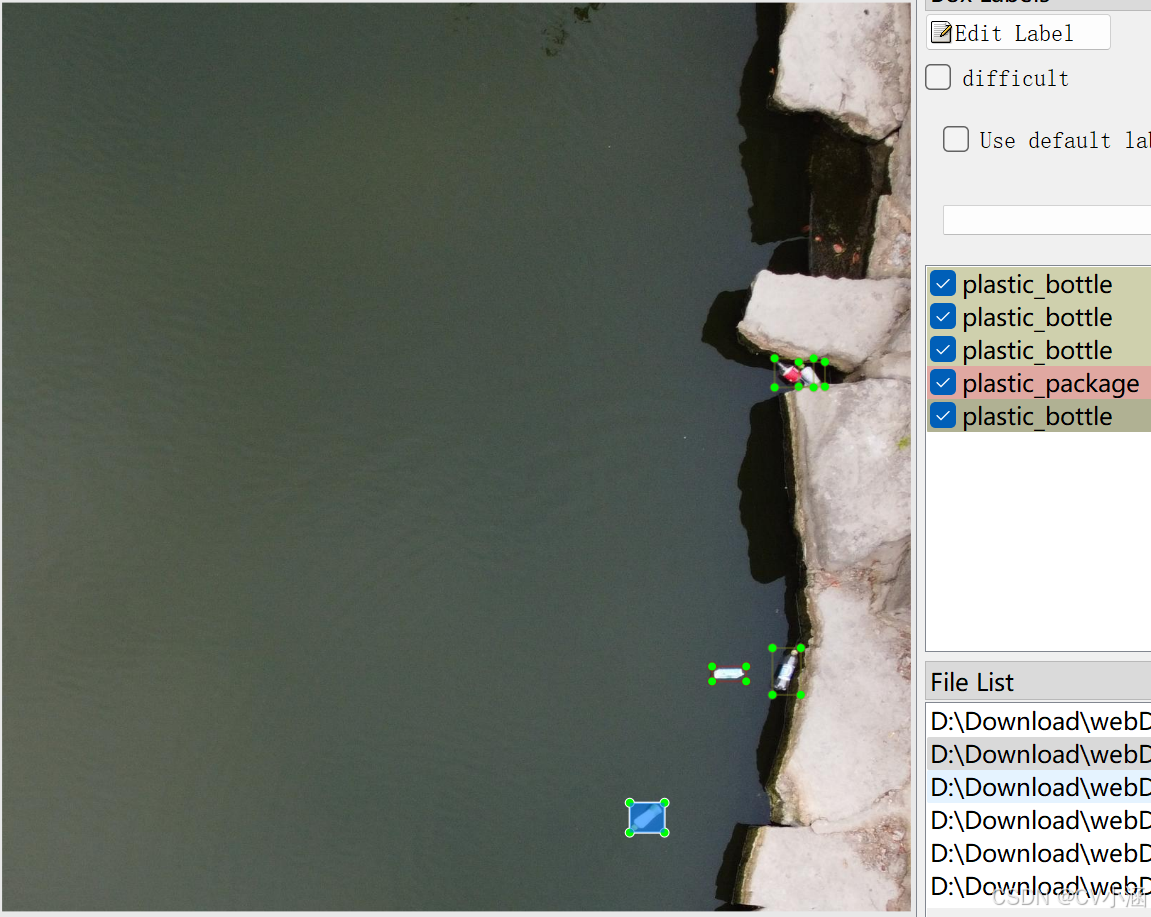
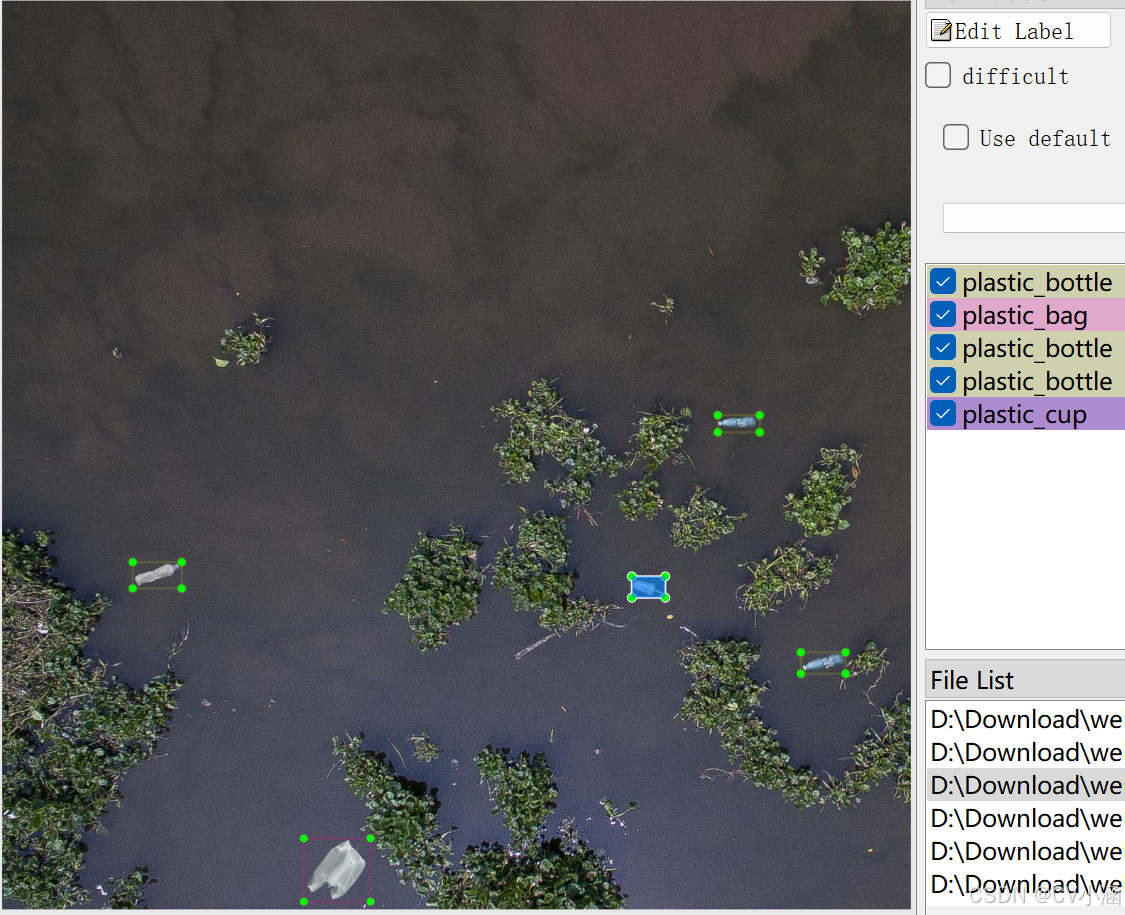
4.1、数据集内容
- 多角度场景:监控摄像头视角,航拍视角;
- 标注内容:5个分类,[\'other_plastic\', \'plastic_bag\', \'plastic_bottle\', \'plastic_cup\', \'plastic_package\'];
- 图片总量:4487 张图片数据;
- 标注类型:含有Pascal VOC XML格式和yolo TXT格式;
5、训练过程
5.1、导入训练数据
下载YOLOv8项目压缩包,解压在任意本地workspace文件夹中。
下载YOLOv8预训练模型,导入到ultralytics-main项目根目录下。

在ultralytics-main项目根目录下,创建data文件夹,并在data文件夹下创建子文件夹:Annotations、images、imageSets、labels,其中,将pascal VOC格式的XML文件手动导入到Annotations文件夹中,将JPG格式的图像数据导入到images文件夹中,imageSets和labels两个文件夹不导入数据。
data目录结构如下:
data/
——Annotations/ //存放xml文件
——images/ //存放jpg图像
——imageSets/
——labels/
整体项目结构如下所示:

5.2、数据分割
首先在ultralytics-main目录下创建一个split_train_val.py文件,运行文件之后会在imageSets文件夹下将数据集划分为训练集train.txt、验证集val.txt、测试集test.txt,里面存放的就是用于训练、验证、测试的图片名称。
import osimport randomtrainval_percent = 0.9train_percent = 0.9xmlfilepath = \'data/Annotations\'txtsavepath = \'data/ImageSets\'total_xml = os.listdir(xmlfilepath)num = len(total_xml)list = range(num)tv = int(num * trainval_percent)tr = int(tv * train_percent)trainval = random.sample(list, tv)train = random.sample(trainval, tr)ftrainval = open(\'data/ImageSets/trainval.txt\', \'w\')ftest = open(\'data/ImageSets/test.txt\', \'w\')ftrain = open(\'data/ImageSets/train.txt\', \'w\')fval = open(\'data/ImageSets/val.txt\', \'w\')for i in list: name = total_xml[i][:-4] + \'\\n\' if i in trainval: ftrainval.write(name) if i in train: ftrain.write(name) else: fval.write(name) else: ftest.write(name)ftrainval.close()ftrain.close()fval.close()ftest.close()5.3、数据集格式化处理
在ultralytics-main目录下创建一个voc_label.py文件,用于处理图像标注数据,将其从XML格式(通常用于Pascal VOC数据集)转换为YOLO格式。
convert_annotation函数
-
这个函数读取一个图像的XML标注文件,将其转换为YOLO格式的文本文件。
-
它打开XML文件,解析树结构,提取图像的宽度和高度。
-
然后,它遍历每个目标对象(
object),检查其类别是否在classes列表中,并忽略标注为困难(difficult)的对象。 -
对于每个有效的对象,它提取边界框坐标,进行必要的越界修正,然后调用
convert函数将坐标转换为YOLO格式。 -
最后,它将类别ID和归一化后的边界框坐标写入一个新的文本文件。
import xml.etree.ElementTree as ETimport osfrom os import getcwdsets = [\'train\', \'val\', \'test\']classes = [\'other_plastic\', \'plastic_bag\', \'plastic_bottle\', \'plastic_cup\', \'plastic_package\'] # 根据标签名称填写类别abs_path = os.getcwd()print(abs_path)def convert(size, box): dw = 1. / (size[0]) dh = 1. / (size[1]) x = (box[0] + box[1]) / 2.0 - 1 y = (box[2] + box[3]) / 2.0 - 1 w = box[1] - box[0] h = box[3] - box[2] x = x * dw w = w * dw y = y * dh h = h * dh return x, y, w, hdef convert_annotation(image_id): in_file = open(\'data/Annotations/%s.xml\' % (image_id), encoding=\'UTF-8\') out_file = open(\'data/labels/%s.txt\' % (image_id), \'w\') tree = ET.parse(in_file) root = tree.getroot() size = root.find(\'size\') w = int(size.find(\'width\').text) h = int(size.find(\'height\').text) for obj in root.iter(\'object\'): difficult = obj.find(\'difficult\').text cls = obj.find(\'name\').text if cls not in classes or int(difficult) == 1: continue cls_id = classes.index(cls) xmlbox = obj.find(\'bndbox\') b = (float(xmlbox.find(\'xmin\').text), float(xmlbox.find(\'xmax\').text), float(xmlbox.find(\'ymin\').text), float(xmlbox.find(\'ymax\').text)) b1, b2, b3, b4 = b # 标注越界修正 if b2 > w: b2 = w if b4 > h: b4 = h b = (b1, b2, b3, b4) bb = convert((w, h), b) out_file.write(str(cls_id) + \" \" + \" \".join([str(a) for a in bb]) + \'\\n\')wd = getcwd()for image_set in sets: if not os.path.exists(\'data/labels/\'): os.makedirs(\'data/labels/\') image_ids = open(\'data/ImageSets/%s.txt\' % (image_set)).read().strip().split() list_file = open(\'data/%s.txt\' % (image_set), \'w\') for image_id in image_ids: list_file.write(abs_path + \'/data/images/%s.jpg\\n\' % (image_id)) convert_annotation(image_id) list_file.close()5.4、修改数据集配置文件
在ultralytics-main目录下创建一个wheat.yaml文件
train: data/train.txtval: data/val.txttest: data/test.txtnc: 5names: [\'other_plastic\', \'plastic_bag\', \'plastic_bottle\', \'plastic_cup\', \'plastic_package\']5.5、执行命令
执行train.py
model = YOLO(\'yolov8s.pt\')results = model.train(data=\'wheat.yaml\', epochs=200, imgsz=640, batch=16, workers=0, device=0)也可以在终端执行下述命令:
yolo train data=wheat.yaml model=yolov8s.pt epochs=200 imgsz=640 batch=16 workers=0 device=05.6、模型预测
你可以选择新建predict.py预测脚本文件,输入视频流或者图像进行预测。
代码如下:
import cv2from ultralytics import YOLO# Load the YOLOv8 modelmodel = YOLO(\"./best.pt\") # 自定义预测模型加载路径# Open the video filevideo_path = \"./demo.mp4\" # 自定义预测视频路径cap = cv2.VideoCapture(video_path) # Get the video propertiesframe_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))fps = cap.get(cv2.CAP_PROP_FPS)# Define the codec and create VideoWriter objectfourcc = cv2.VideoWriter_fourcc(*\'mp4v\') # Be sure to use lower caseout = cv2.VideoWriter(\'./outputs.mp4\', fourcc, fps, (frame_width, frame_height)) # 自定义输出视频路径# Loop through the video frameswhile cap.isOpened(): # Read a frame from the video success, frame = cap.read() if success: # Run YOLOv8 inference on the frame # results = model(frame) results = model.predict(source=frame, save=True, imgsz=640, conf=0.5) results[0].names[0] = \"道路积水\" # Visualize the results on the frame annotated_frame = results[0].plot() # Write the annotated frame to the output file out.write(annotated_frame) # Display the annotated frame (optional) cv2.imshow(\"YOLOv8 Inference\", annotated_frame) # Break the loop if \'q\' is pressed if cv2.waitKey(1) & 0xFF == ord(\"q\"): break else: # Break the loop if the end of the video is reached break# Release the video capture and writer objectscap.release()out.release()cv2.destroyAllWindows()也可以直接在命令行窗口或者Annoconda终端输入以下命令进行模型预测:
yolo predict model=\"best.pt\" source=\'demo.jpg\'6、获取数据集
文章底部名片或主页私信获取数据集~
二、基于QT的目标检测可视化界面
1、环境配置
# 安装torch环境pip install torch -i https://pypi.tuna.tsinghua.edu.cn/simple# 安装PySide6依赖项pip install PySide6 -i https://pypi.tuna.tsinghua.edu.cn/simple# 安装opencv-python依赖项pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple2、使用说明

界面功能介绍:
- 原视频/图片区:上半部分左边区域为原视频/图片展示区;
- 检测区:上半部分右边区域为检测结果输出展示区;
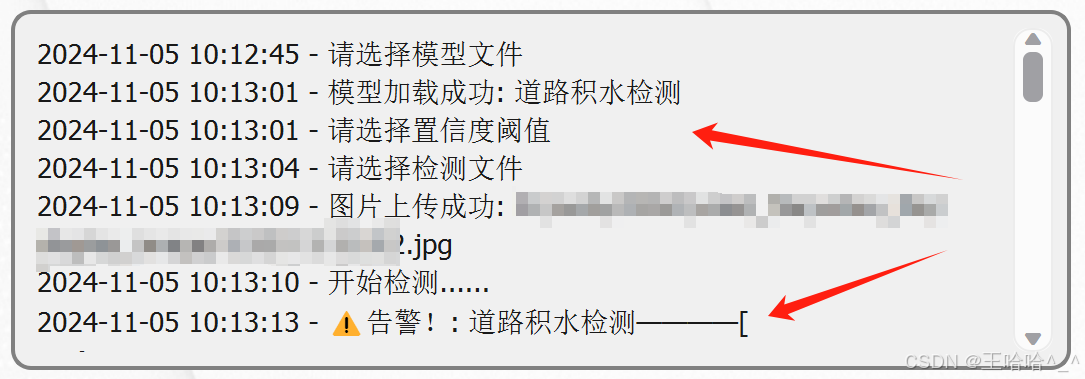
- 文本框:打印输出操作日志,其中告警以json格式输出,包含标签框的坐标,标签名称等;
- 加载模型:下拉框绑定本地文件路径,按钮加载路径下的模型文件;
- 置信度阈值:自定义检测区的置信度阈值,可以通过滑动条的方式设置;
- 文件上传:选择目标文件,包含JPG格式和MP4格式;
- 开始检测:执行检测程序;
- 停止:终止检测程序;
3、预测效果展示
3.1、图片检测

切换置信度再次执行:

上图左下区域可以看到json格式的告警信息,用于反馈实际作业中的管理系统,为管理员提供道路养护决策 。
3.2、视频检测

3.3、日志文本框
4、前端代码
class MyWindow(QtWidgets.QMainWindow): def __init__(self): super().__init__() self.init_gui() self.model = None self.timer = QtCore.QTimer() self.timer1 = QtCore.QTimer() self.cap = None self.video = None self.file_path = None self.base_name = None self.timer1.timeout.connect(self.video_show) def init_gui(self): self.folder_path = \"model_file\" # 自定义修改:设置文件夹路径 self.setFixedSize(1300, 650) self.setWindowTitle(\'目标检测\') # 自定义修改:设置窗口名称 self.setWindowIcon(QIcon(\"111.jpg\")) # 自定义修改:设置窗口图标 central_widget = QtWidgets.QWidget(self) self.setCentralWidget(central_widget) main_layout = QtWidgets.QVBoxLayout(central_widget) # 界面上半部分: 视频框 topLayout = QtWidgets.QHBoxLayout() self.oriVideoLabel = QtWidgets.QLabel(self) # 界面下半部分: 输出框 和 按钮 groupBox = QtWidgets.QGroupBox(self) groupBox.setStyleSheet(\'QGroupBox {border: 0px solid #D7E2F9;}\') bottomLayout = QtWidgets.QHBoxLayout(groupBox) main_layout.addWidget(groupBox) btnLayout = QtWidgets.QHBoxLayout() btn1Layout = QtWidgets.QVBoxLayout() btn2Layout = QtWidgets.QVBoxLayout() btn3Layout = QtWidgets.QVBoxLayout() # 创建日志打印文本框 self.outputField = QtWidgets.QTextBrowser() self.outputField.setFixedSize(530, 180) self.outputField.setStyleSheet(\'font-size: 13px; font-family: \"Microsoft YaHei\"; background-color: #f0f0f0; border: 2px solid #ccc; border-radius: 10px;\') self.detectlabel = QtWidgets.QLabel(self) self.oriVideoLabel.setFixedSize(530, 400) self.detectlabel.setFixedSize(530, 400) self.oriVideoLabel.setStyleSheet(\'border: 2px solid #ccc; border-radius: 10px; margin-top:75px;\') self.detectlabel.setStyleSheet(\'border: 2px solid #ccc; border-radius: 10px; margin-top: 75px;\') topLayout.addWidget(self.oriVideoLabel) topLayout.addWidget(self.detectlabel) main_layout.addLayout(topLayout)5、代码获取
YOLO可视化界面
更多数据集请查看置顶博文!
以上内容均为原创,搬运请私信。

