D10PID调试经过记录
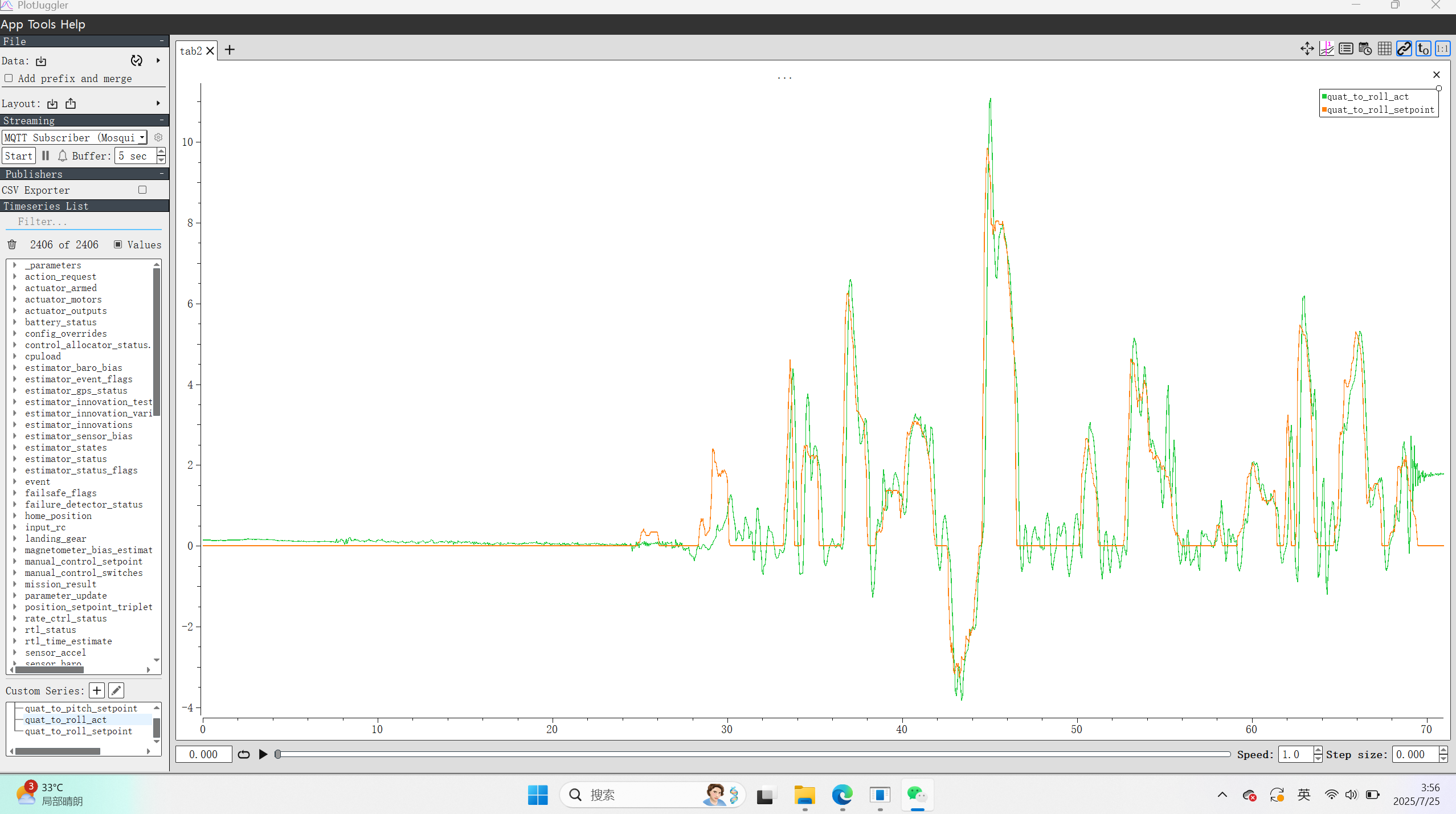
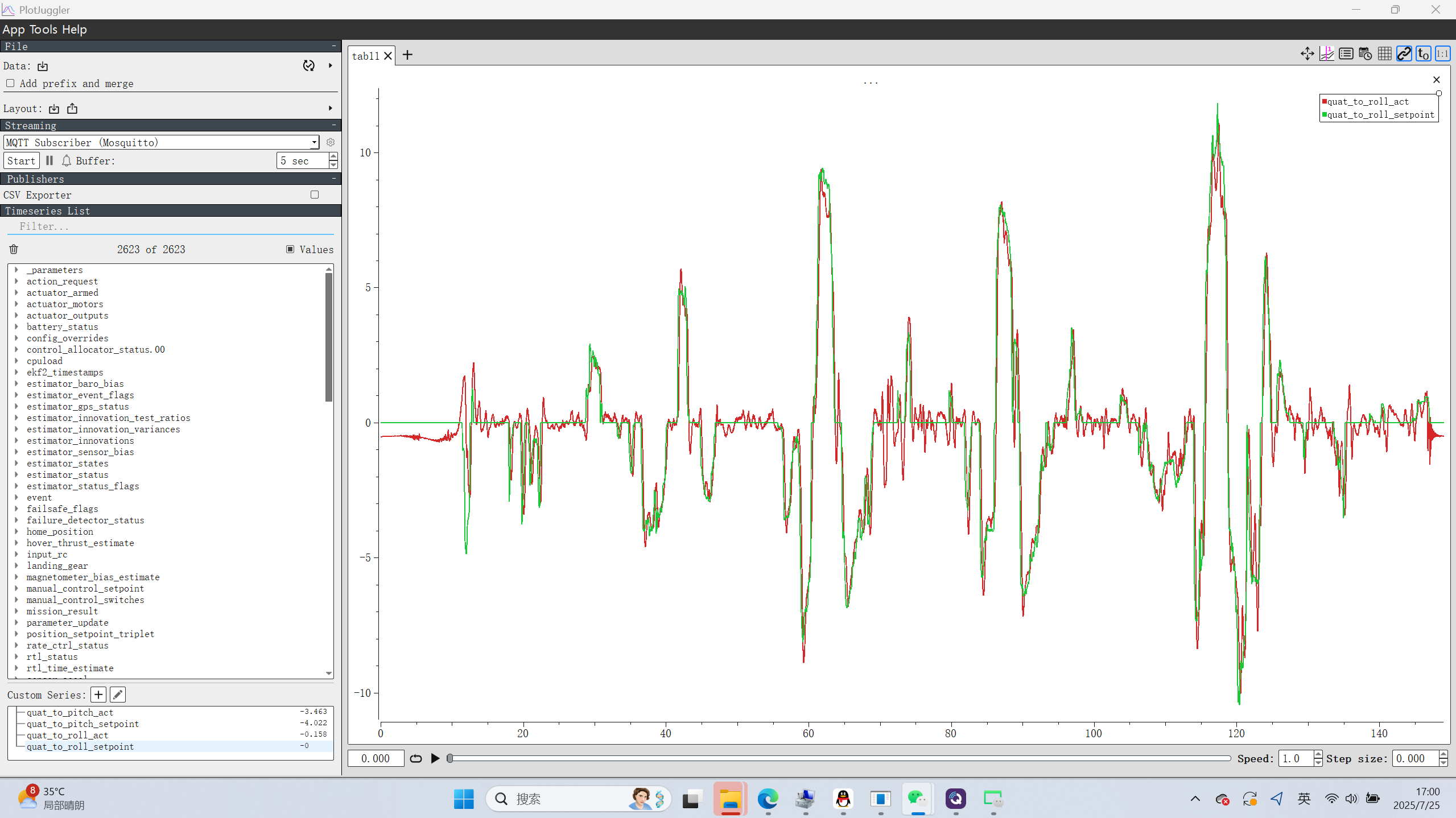
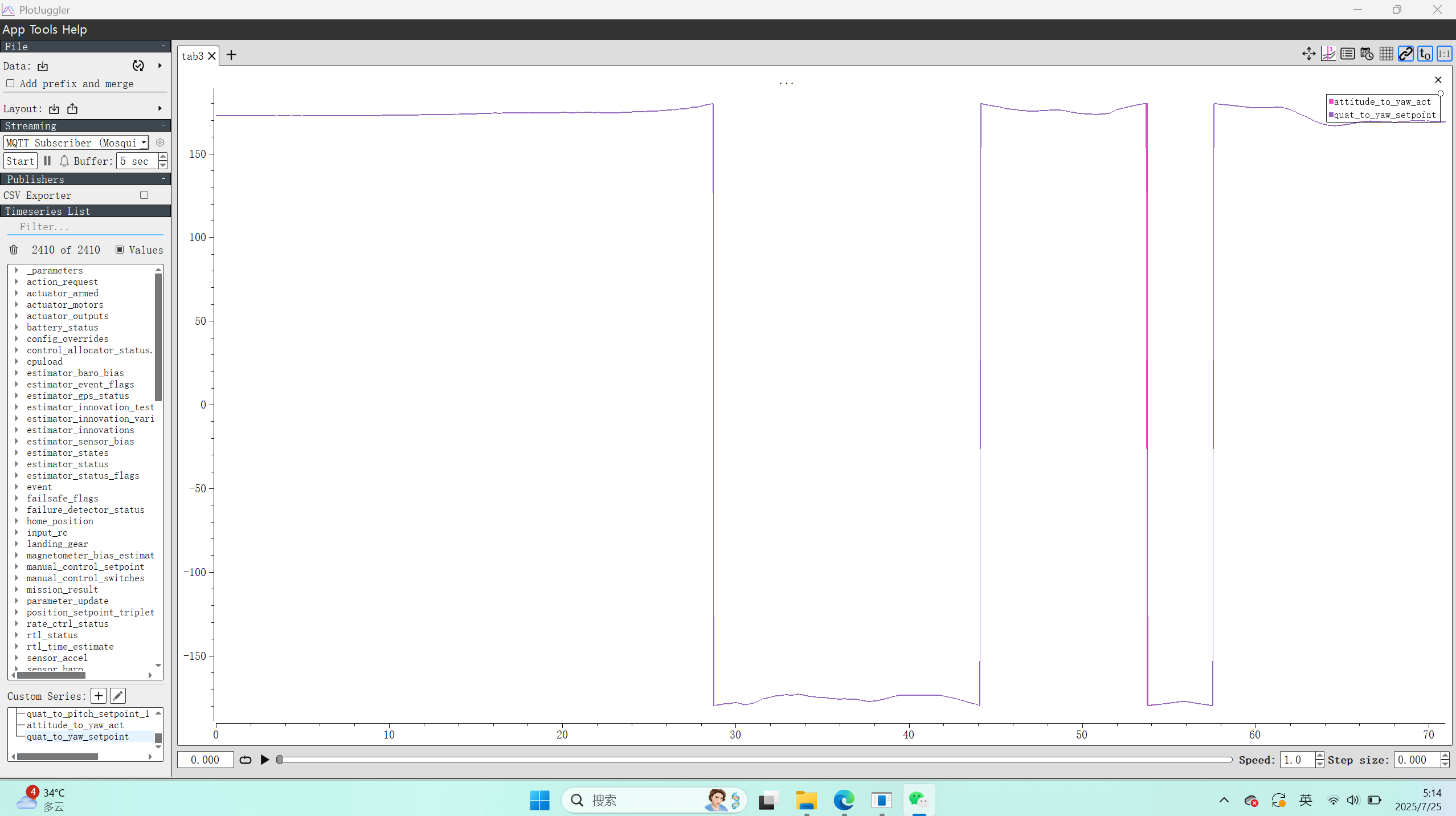
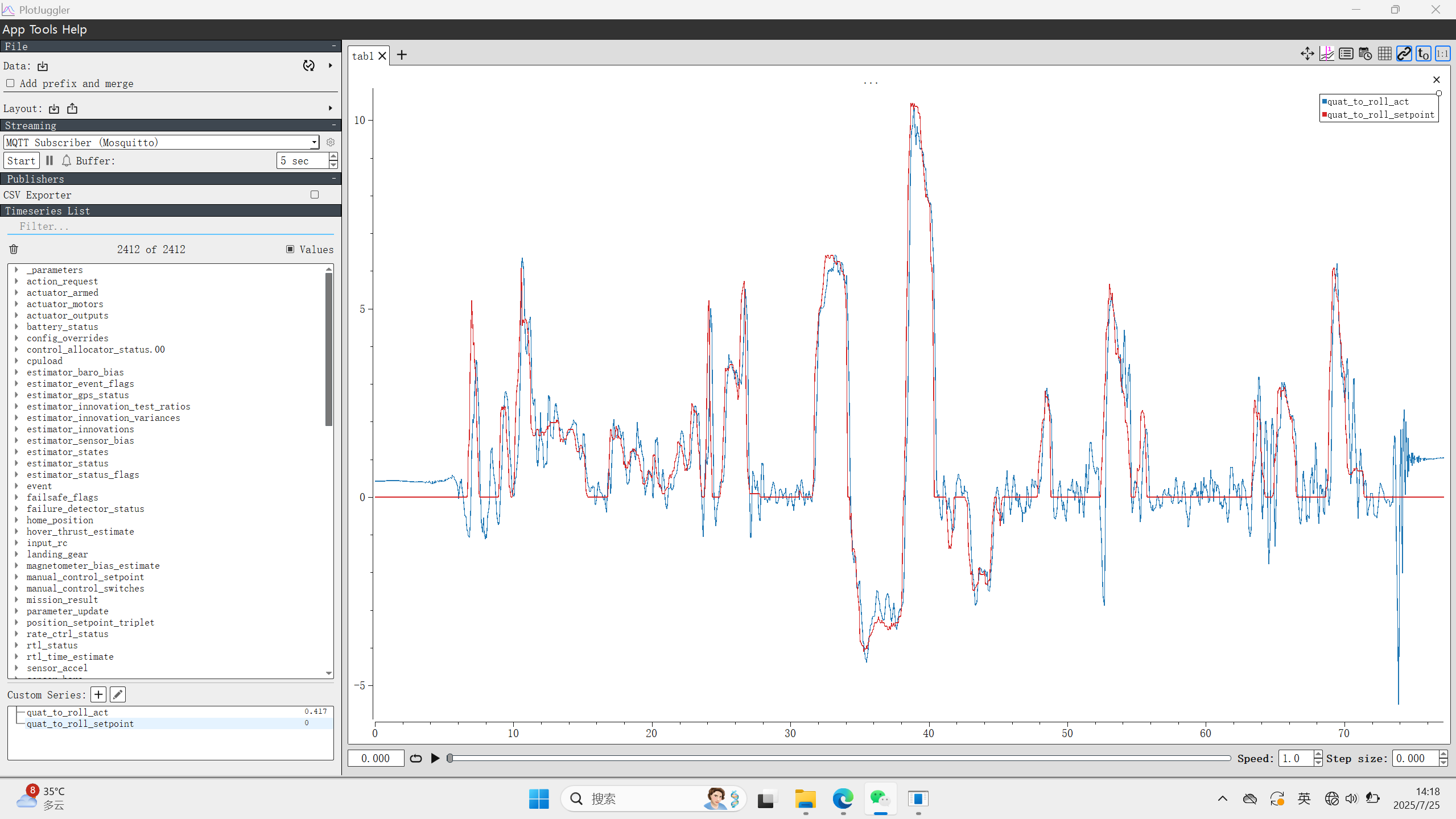
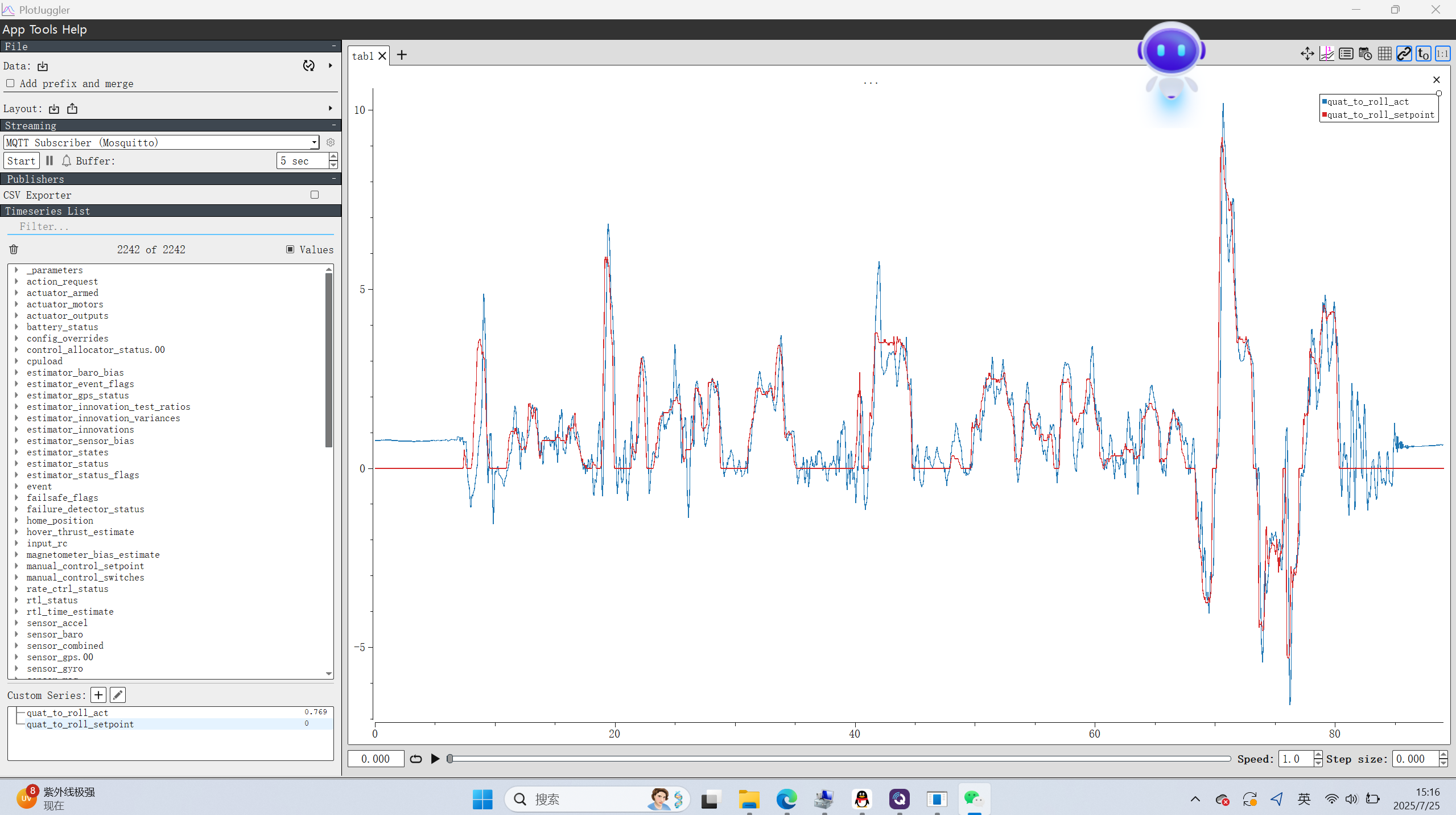
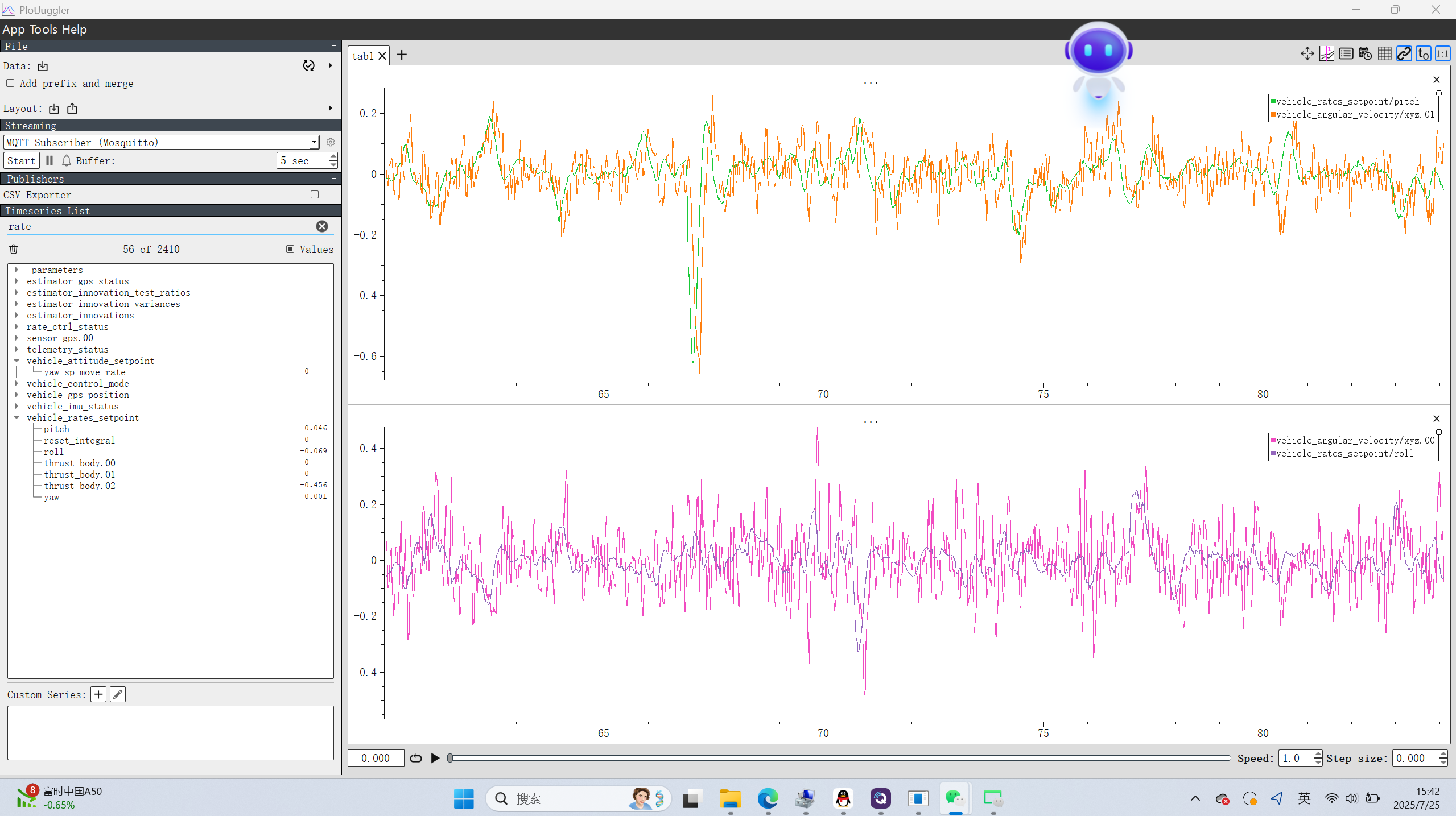
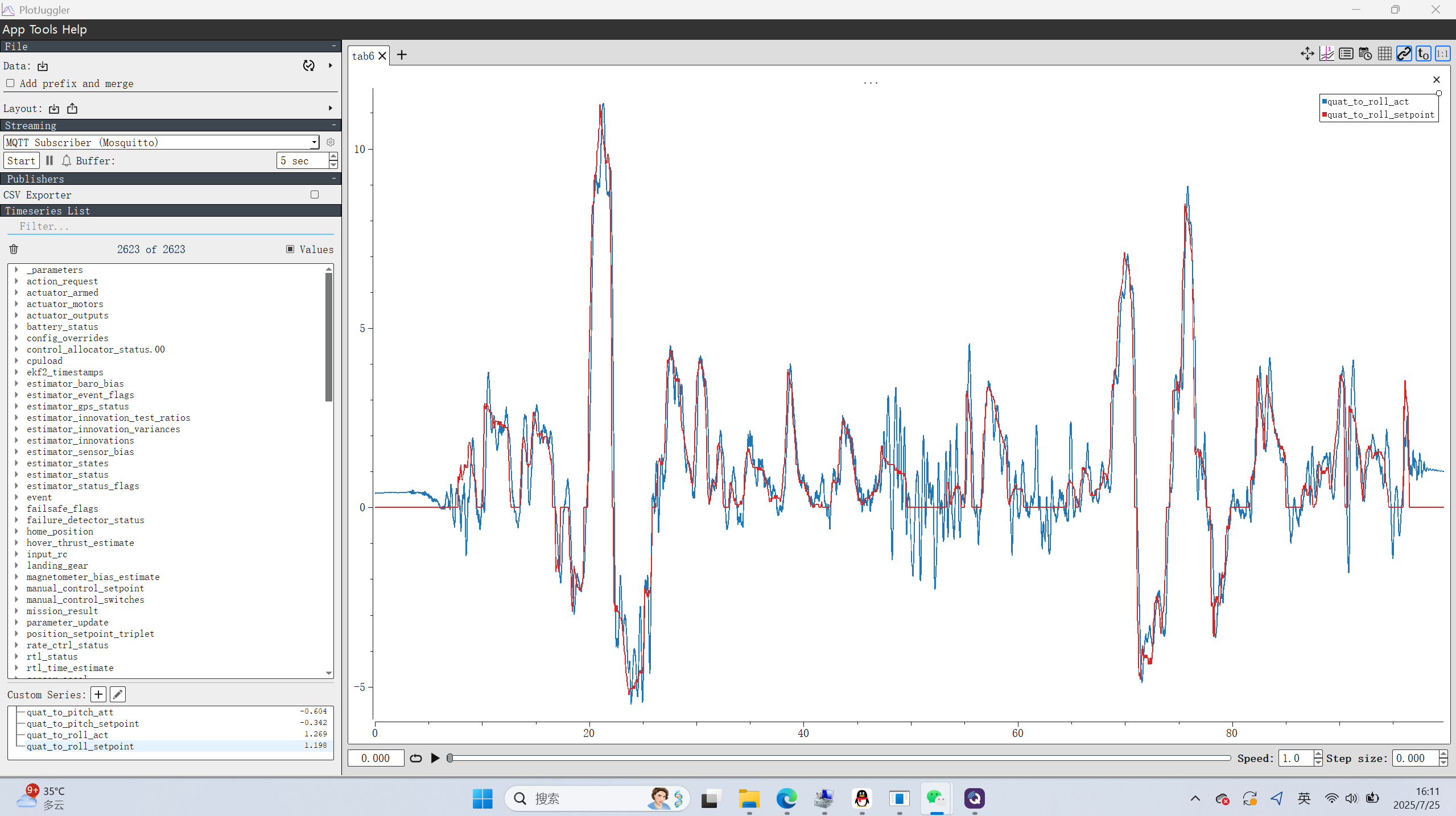
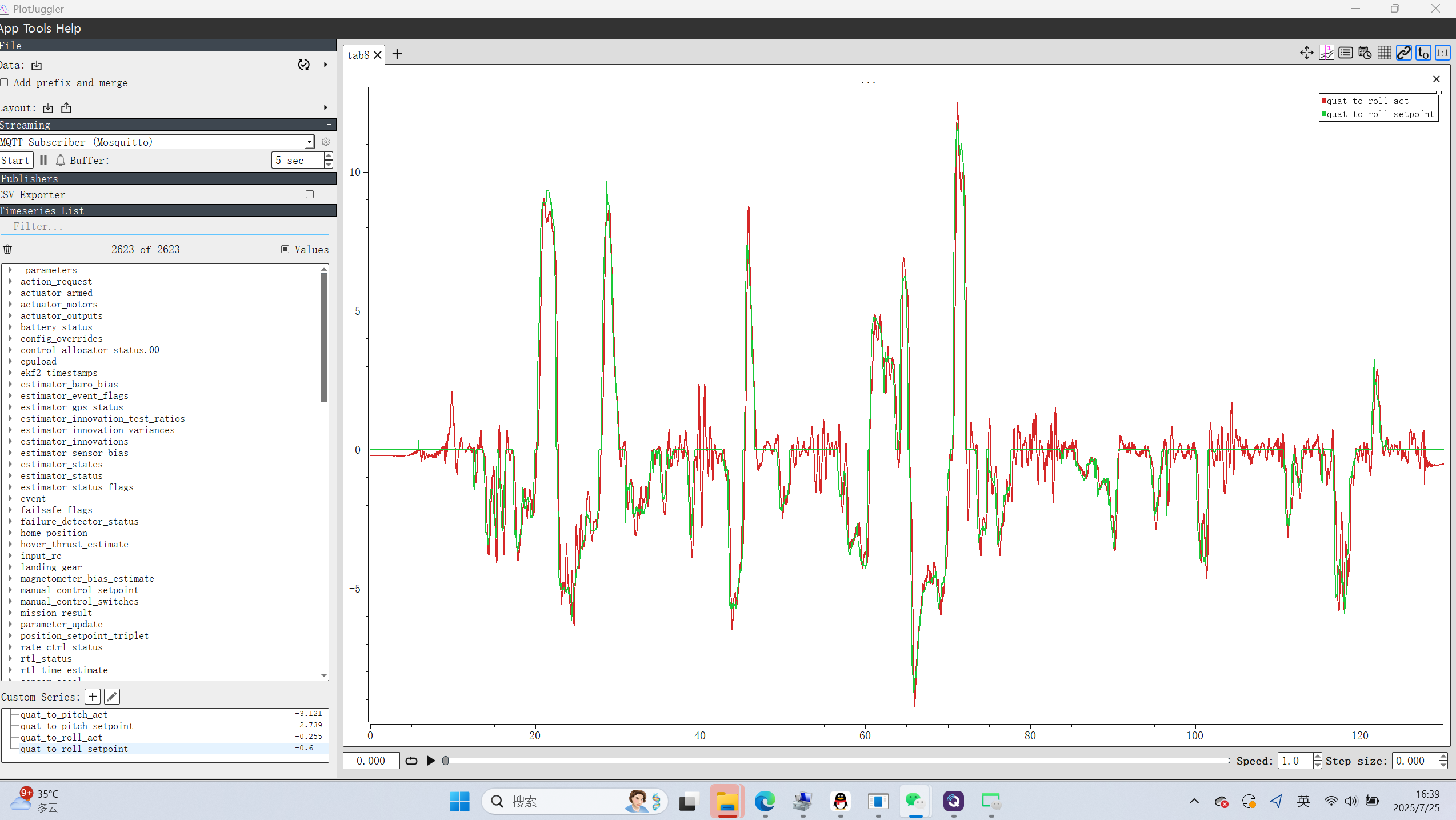
结论: 依据上图,我们可以看到横滚角实际值超越了期望值, 那么很明显角度环的P需要减小一下。 从6.5降低到6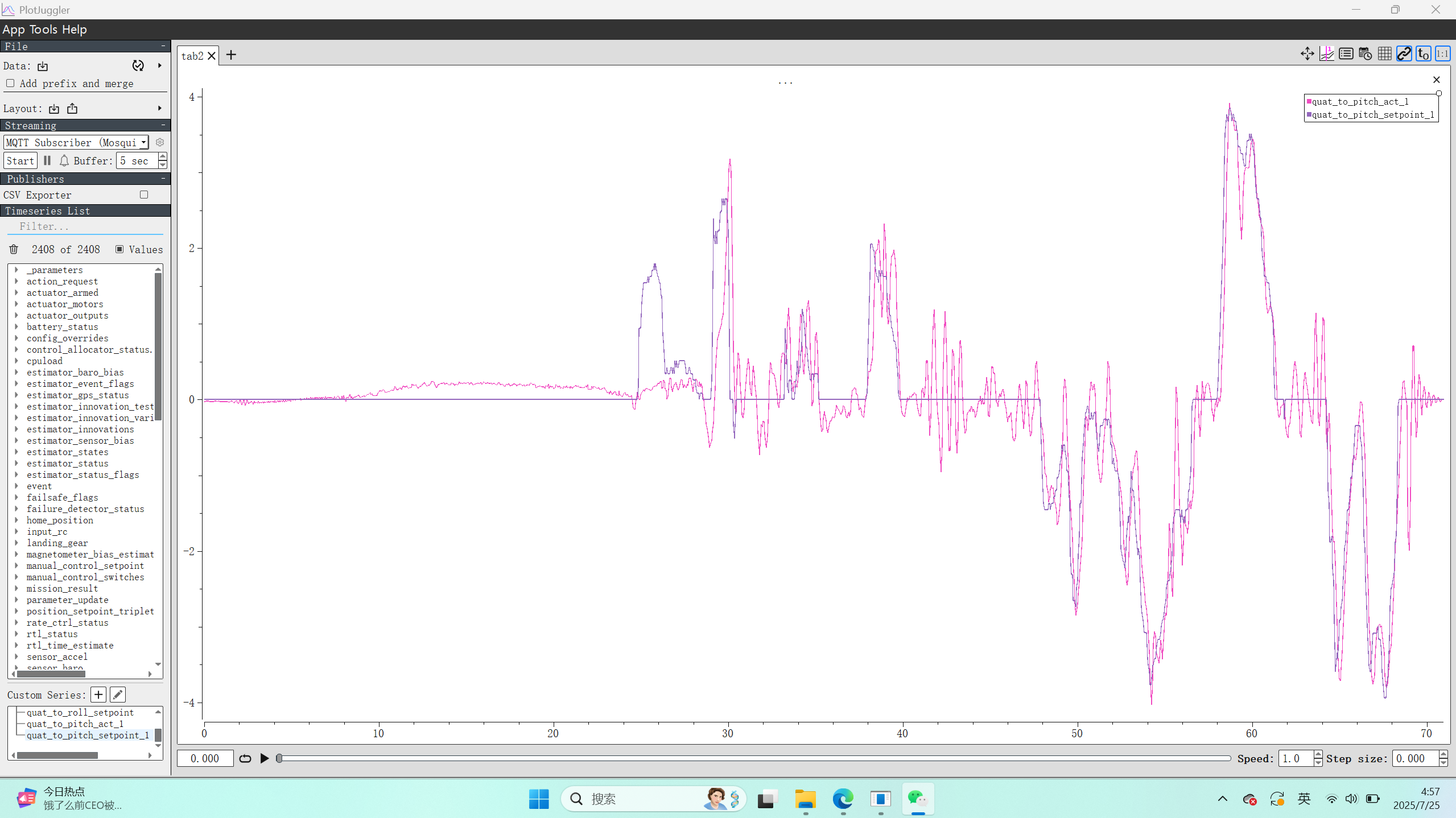
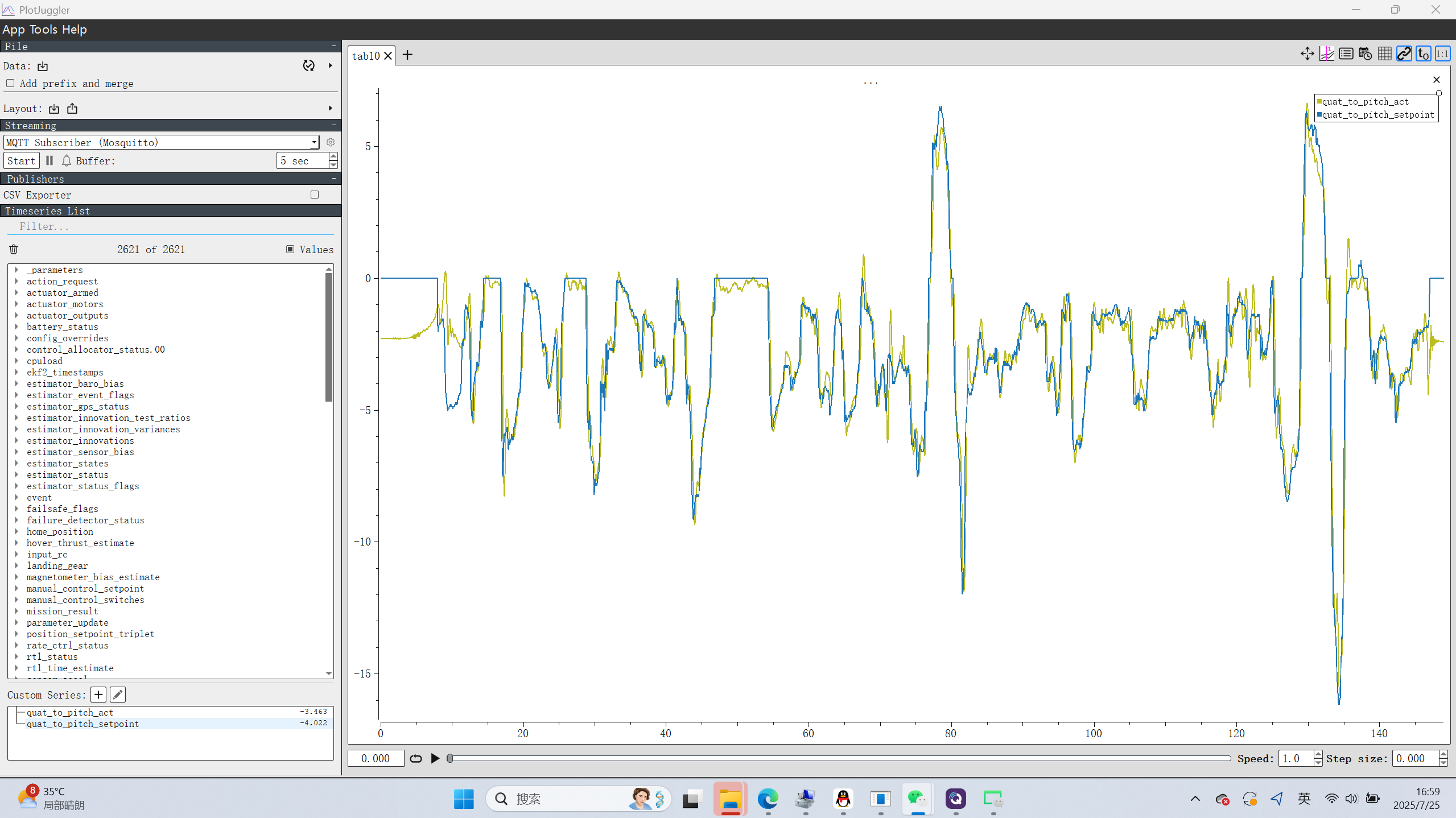
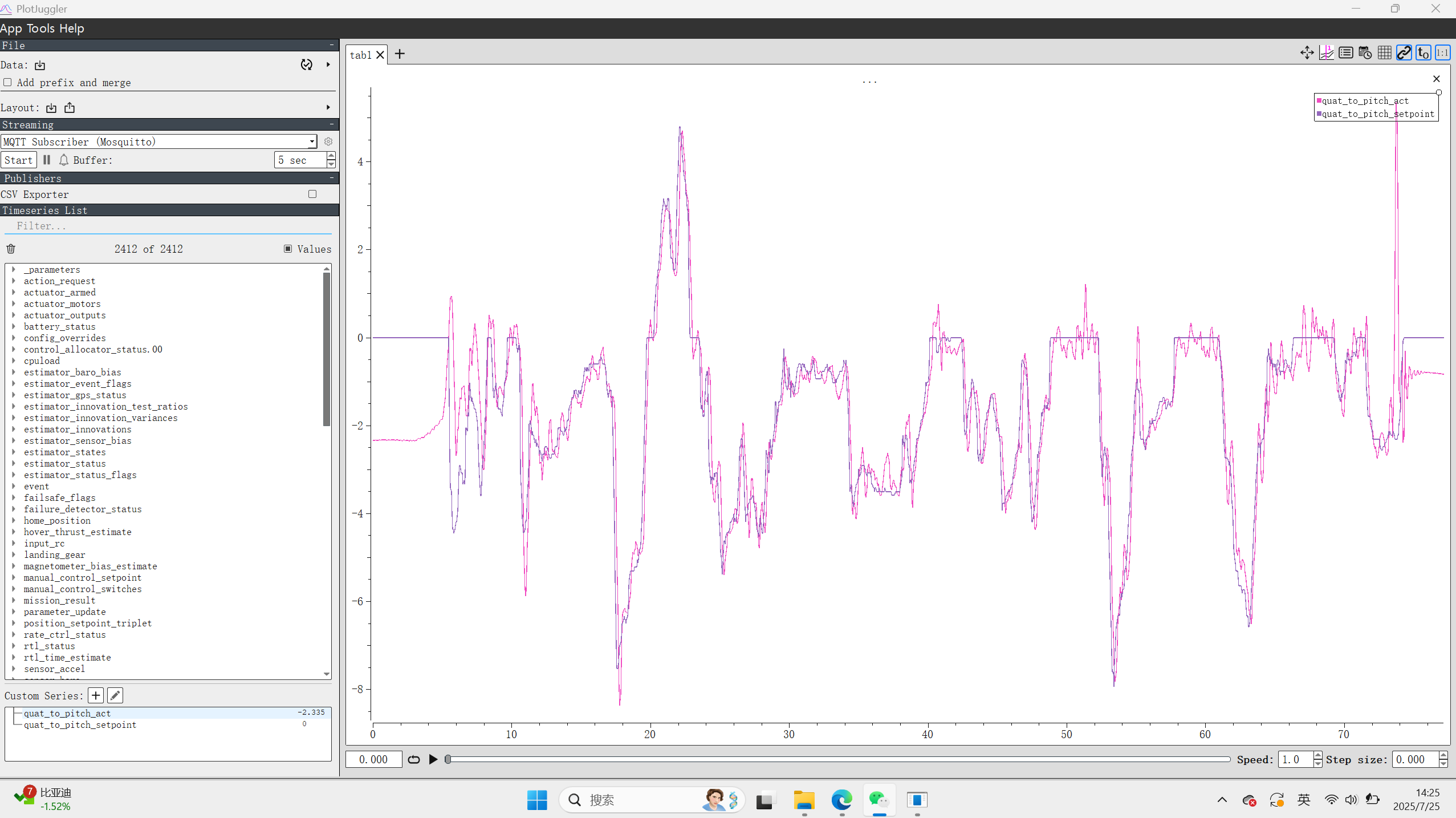
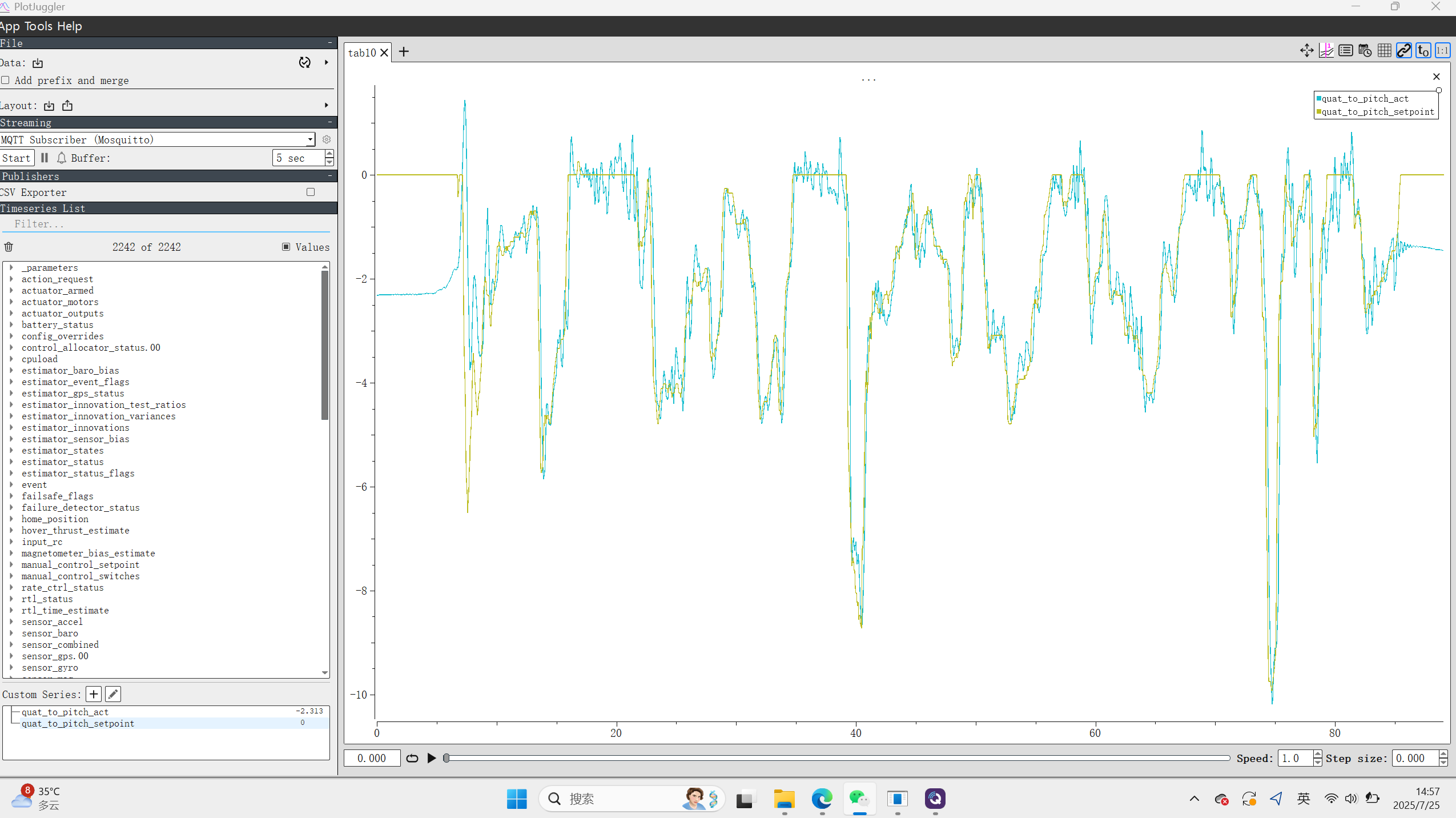
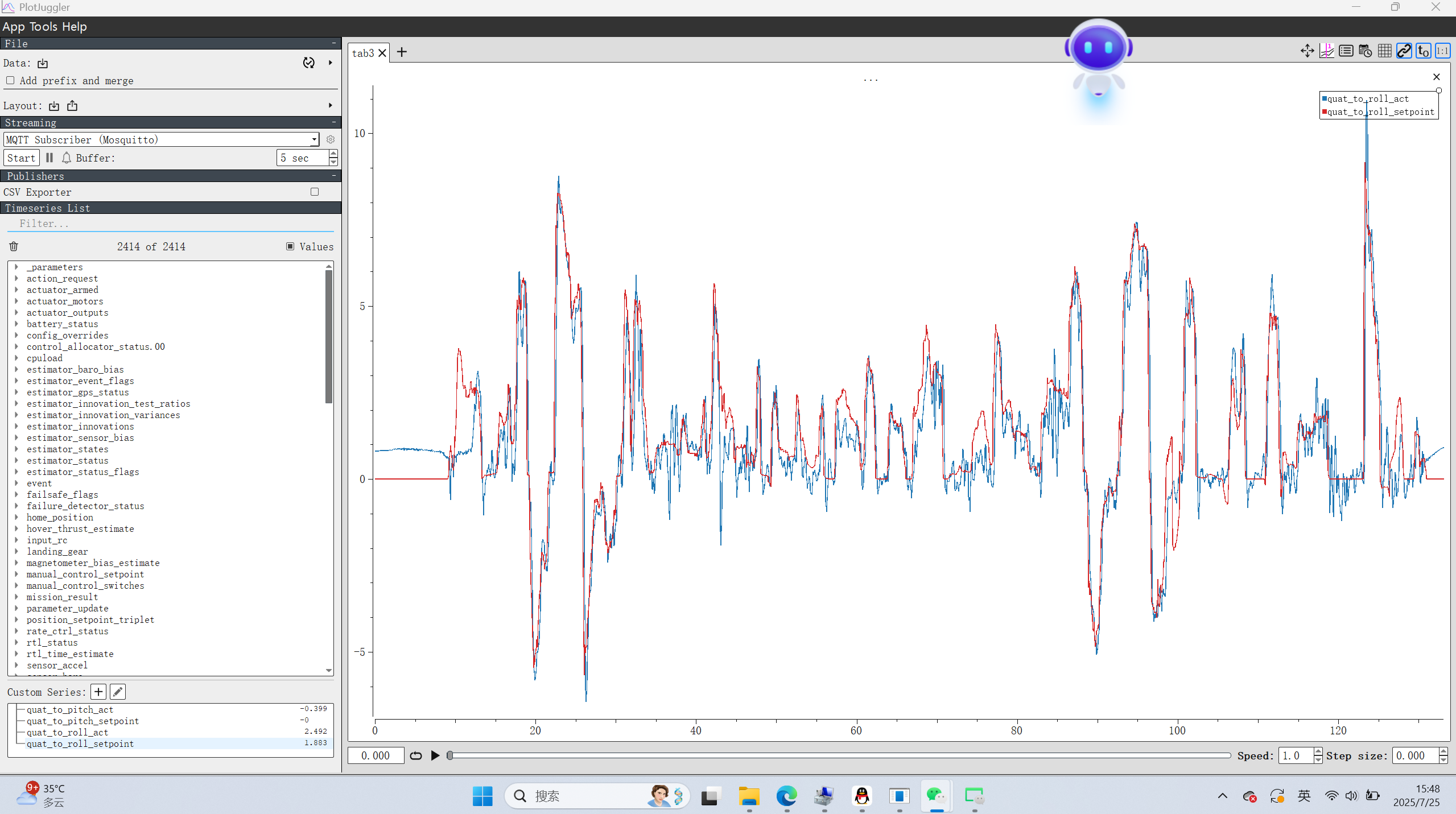
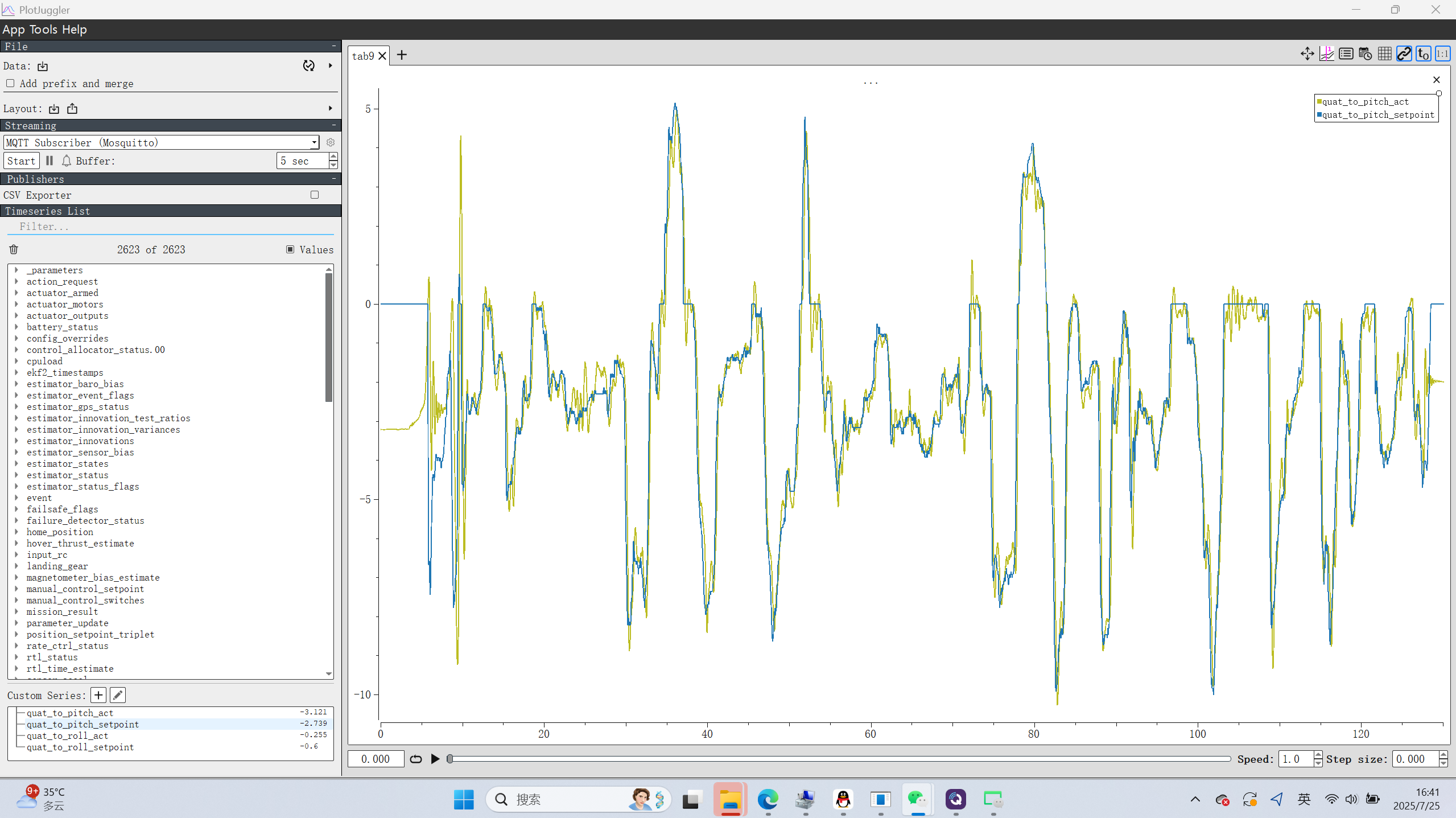
结论:俯仰角度环跟踪效果还是不错的, 这里我先保持角度环P不变。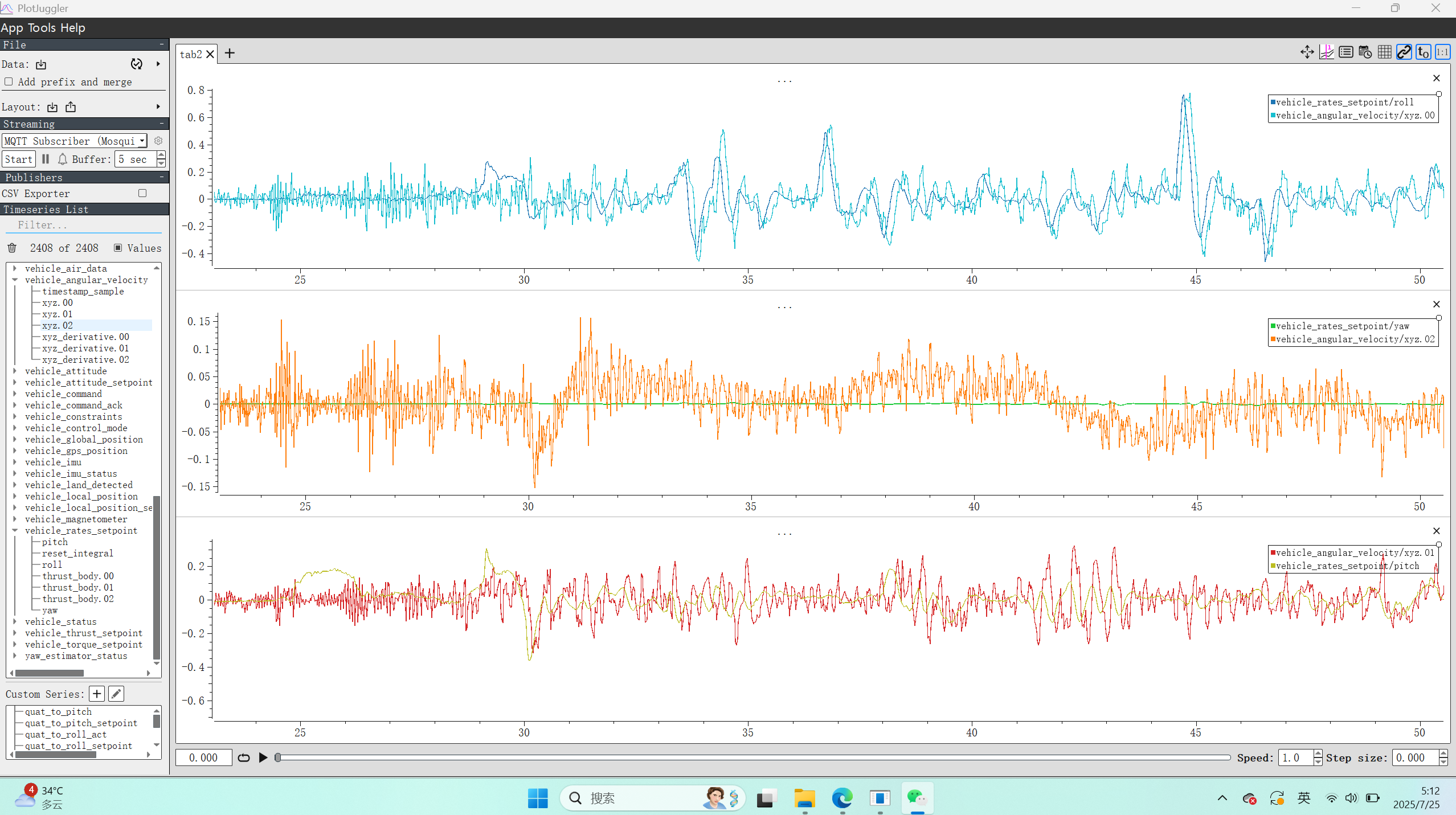
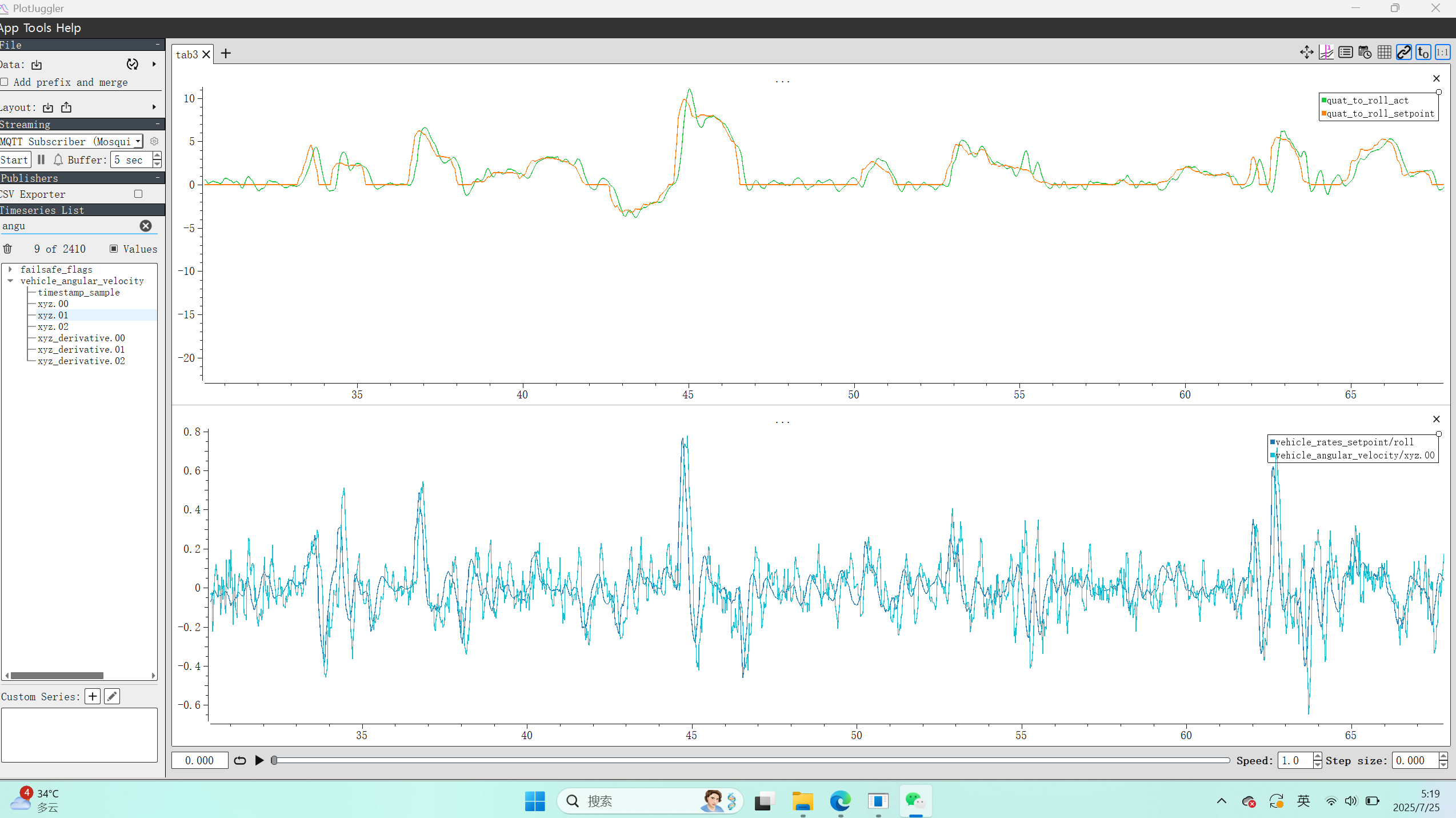
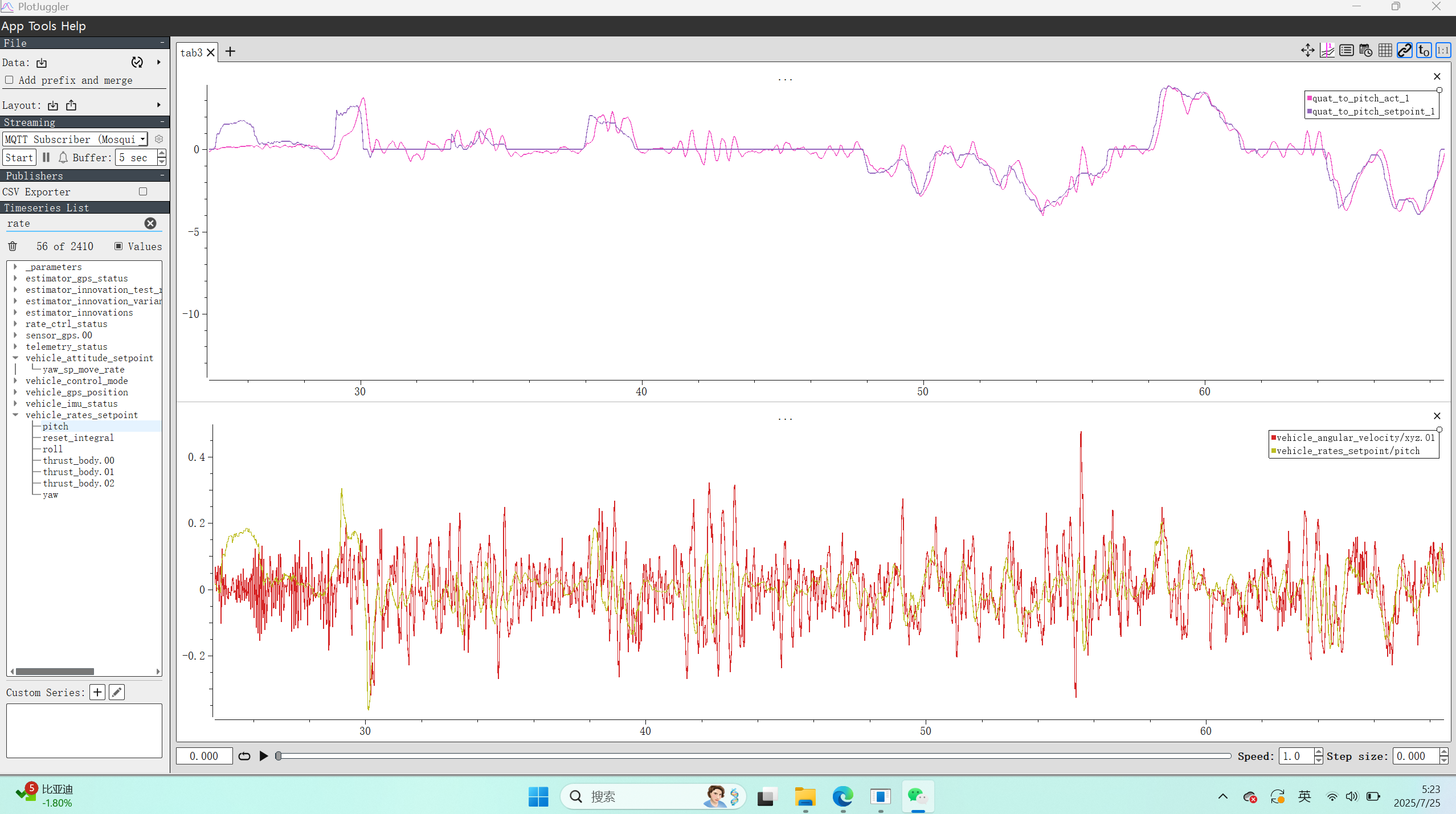
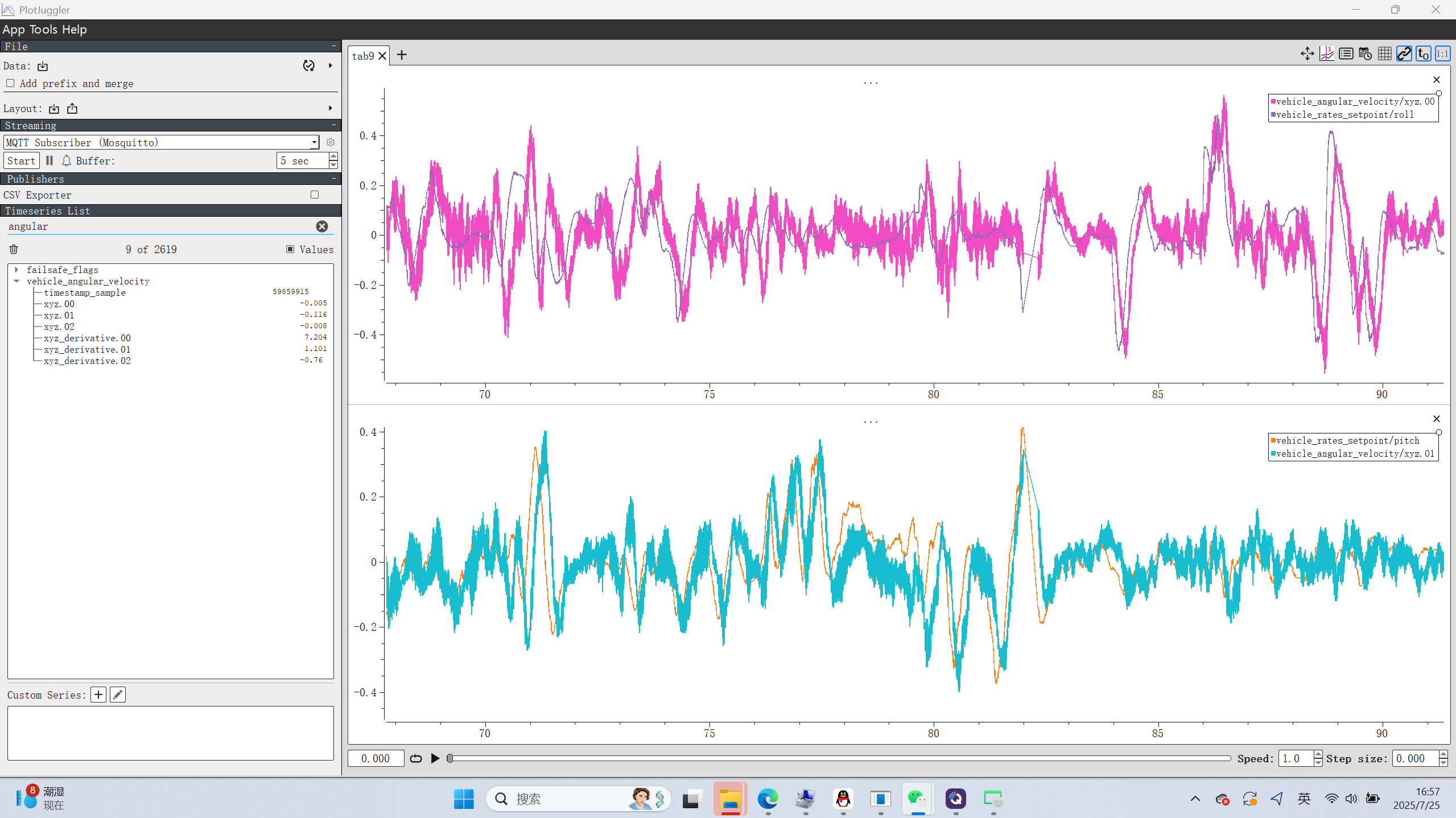
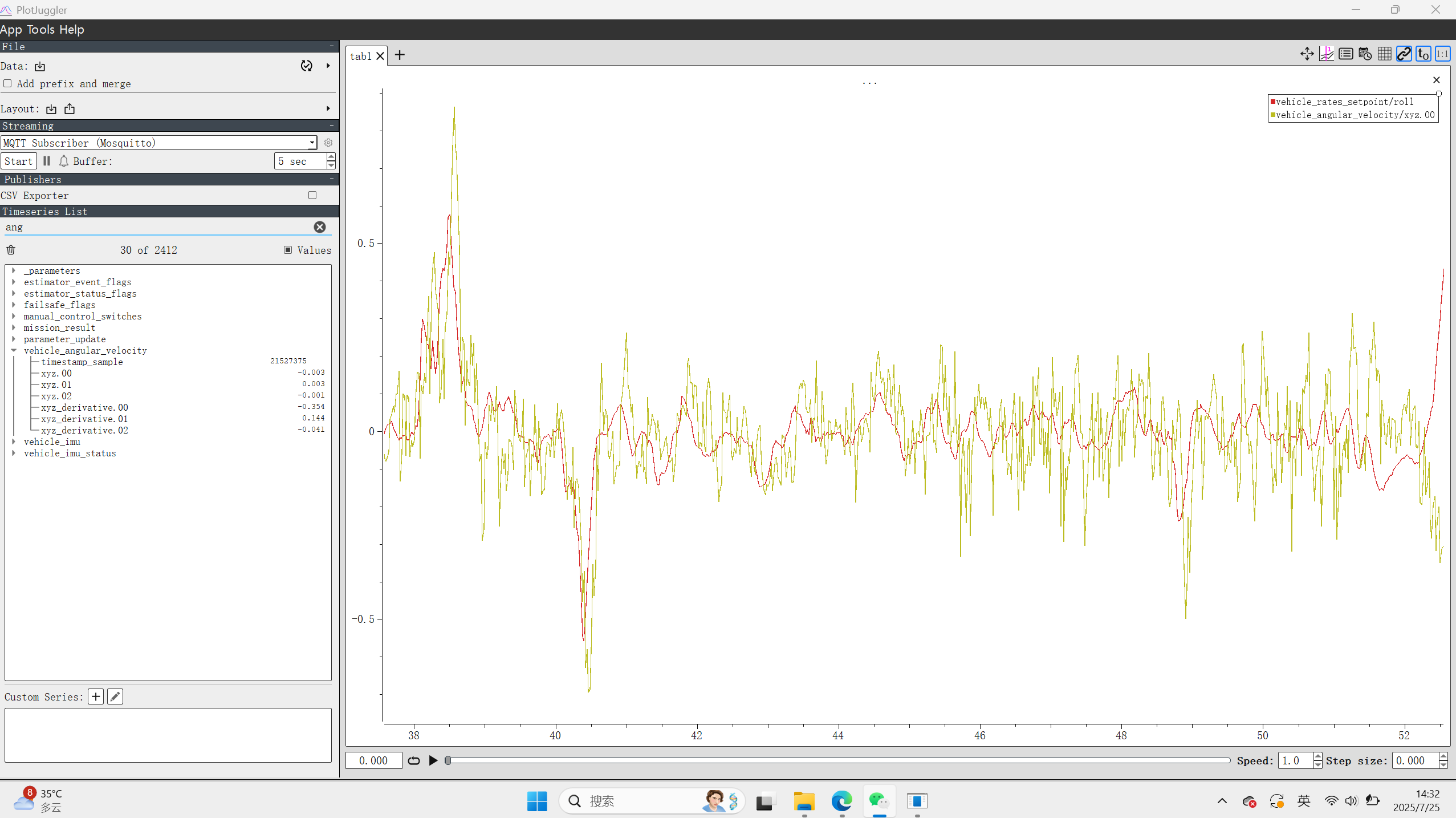
从上图来看, 横滚的角速率环节p应该降低
第一次飞行的PID我这里记录一下
MC_PITCHRATE_P = 0.15 应降低
MC_PITCHRATE_I = 0.2
MC_PITCHRATE_D= 0.003
MC_PITCHRATE_FF = 0
MC_PITCHRATE_MAX = 220
MC_PR_INT_LIM = 0.3
MC_ROLLRATE_P = 0.15 应降低
MC_ROLLRATE_I = 0.2
MC_ROLLRATE_D = 0.003
MC_ROLLRATE_FF = 0
MC_ROLLRATE_MAX = 220
MC_RR_INT_LIM = 0.3
MC_YAWRATE_P = 0.2
MC_YAWRATE_K = 1
MC_YAWRATE_I = 0.1
MC_YAWRATE_D = 0
MC_YAWRATE_FF = 0
MC_YAWRATE_MAX = 200
角度环的PID我这里记录一下
MC_ROLL_P = 6.5 应降低
MC_PITCH_P = 6.5 维持不变
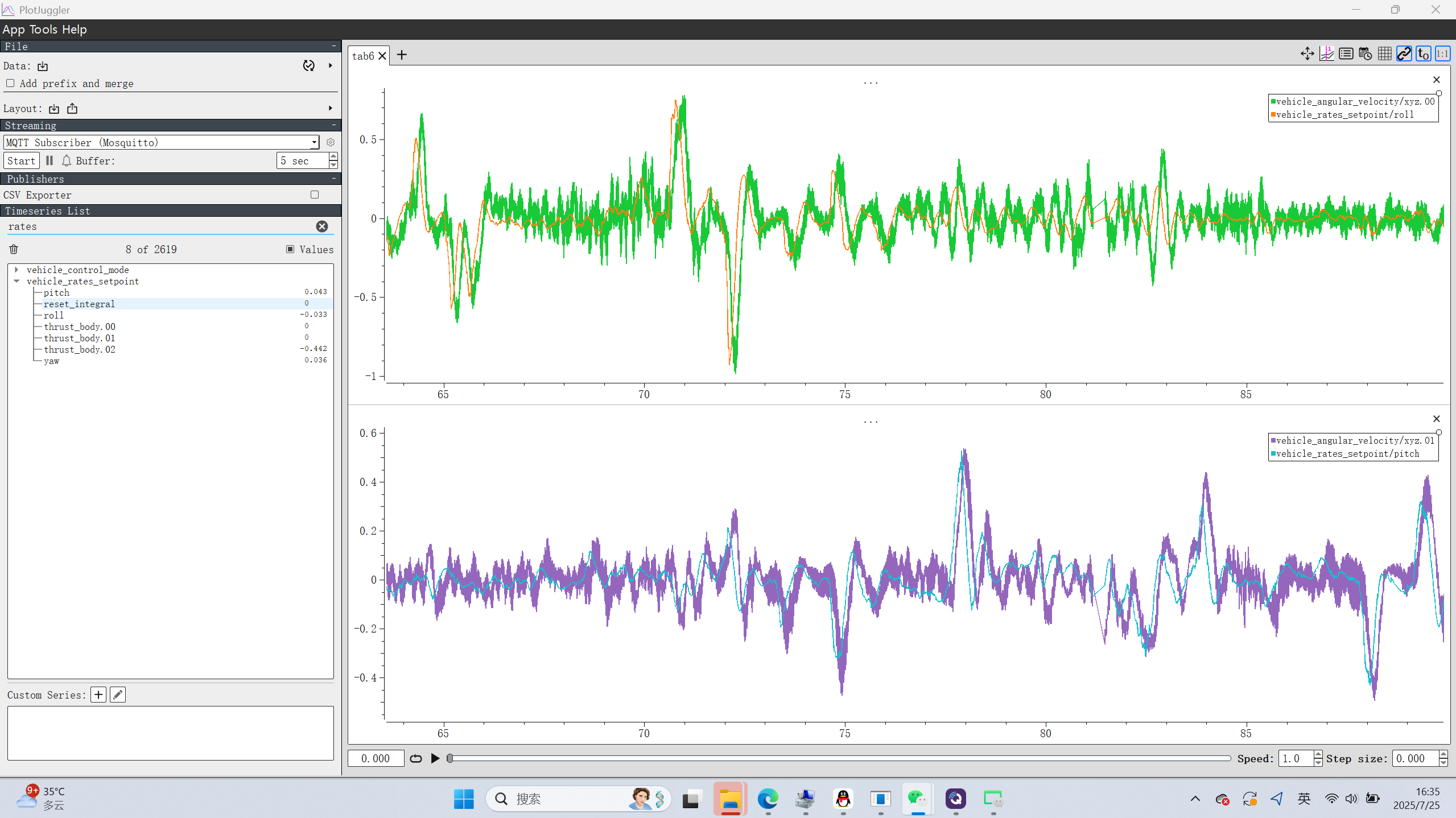
第二次飞行是将横滚的角度p从6.5降低到6.25之后, 角速率环节是这样的
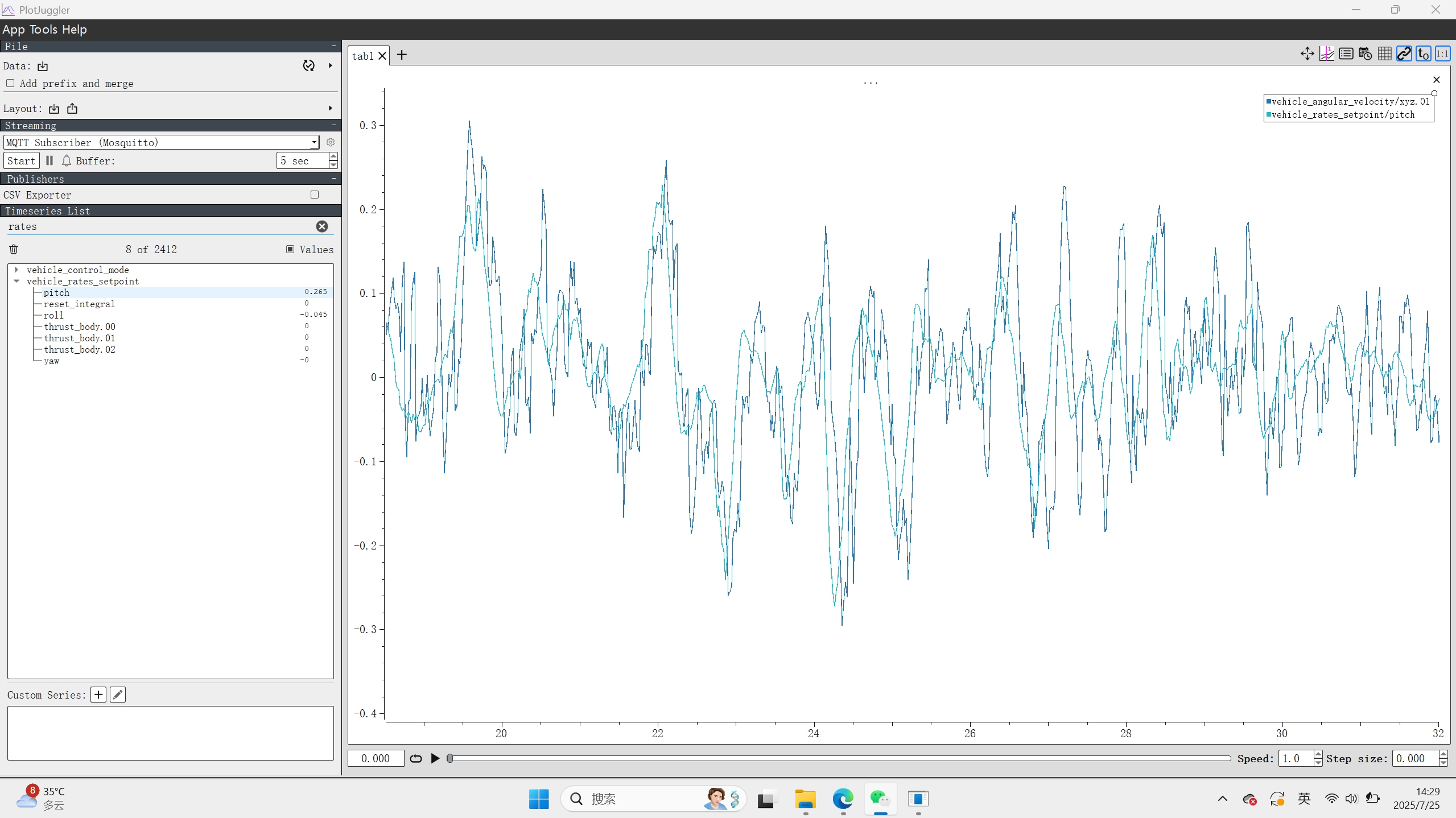
从第二次的飞行来看, 不管是横滚角速率还是俯仰角速率都是超调的, 横滚角速率超调大概0.2, 俯仰角速率超调大概0.1, 我需要将它们两个减小。
第三次飞行, 我把横滚角速率从0.15变成0.14后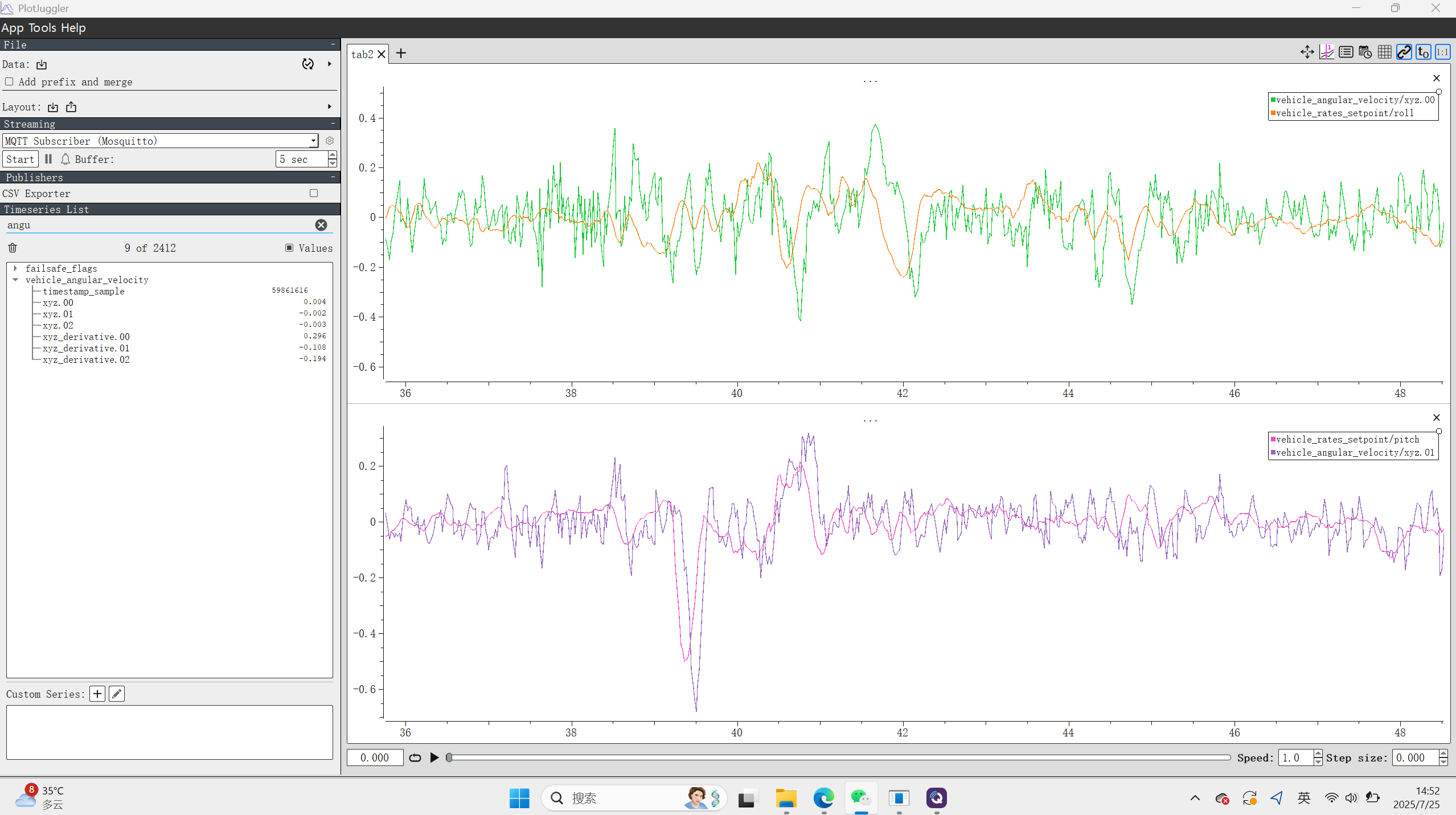
第四次飞行, 我采取了这个措施,MC_ROLLRATE_P从0.14降低为0.13, MC_PITCHRATE_P从0.15降低为0.14, MC_ROLL_P从6.25降低为6.20, 目的是进一步解决横滚角速率环和俯仰角速率环的超调问题。

第五次飞行, 我将MC_PITCHRATE_P设置成了0.13, MC_ROLLRATE_P设置成了0.12, 得到了下面的图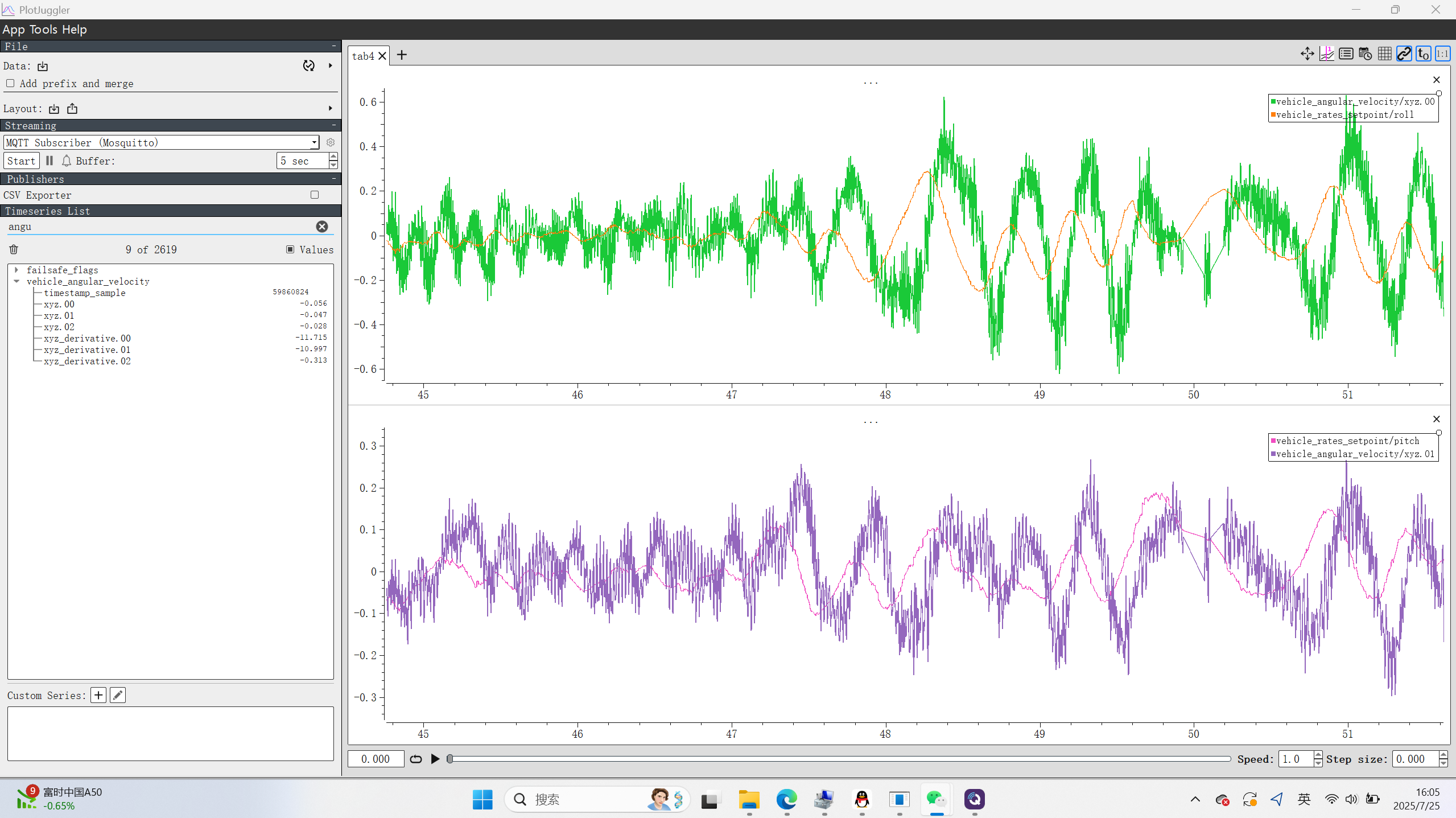
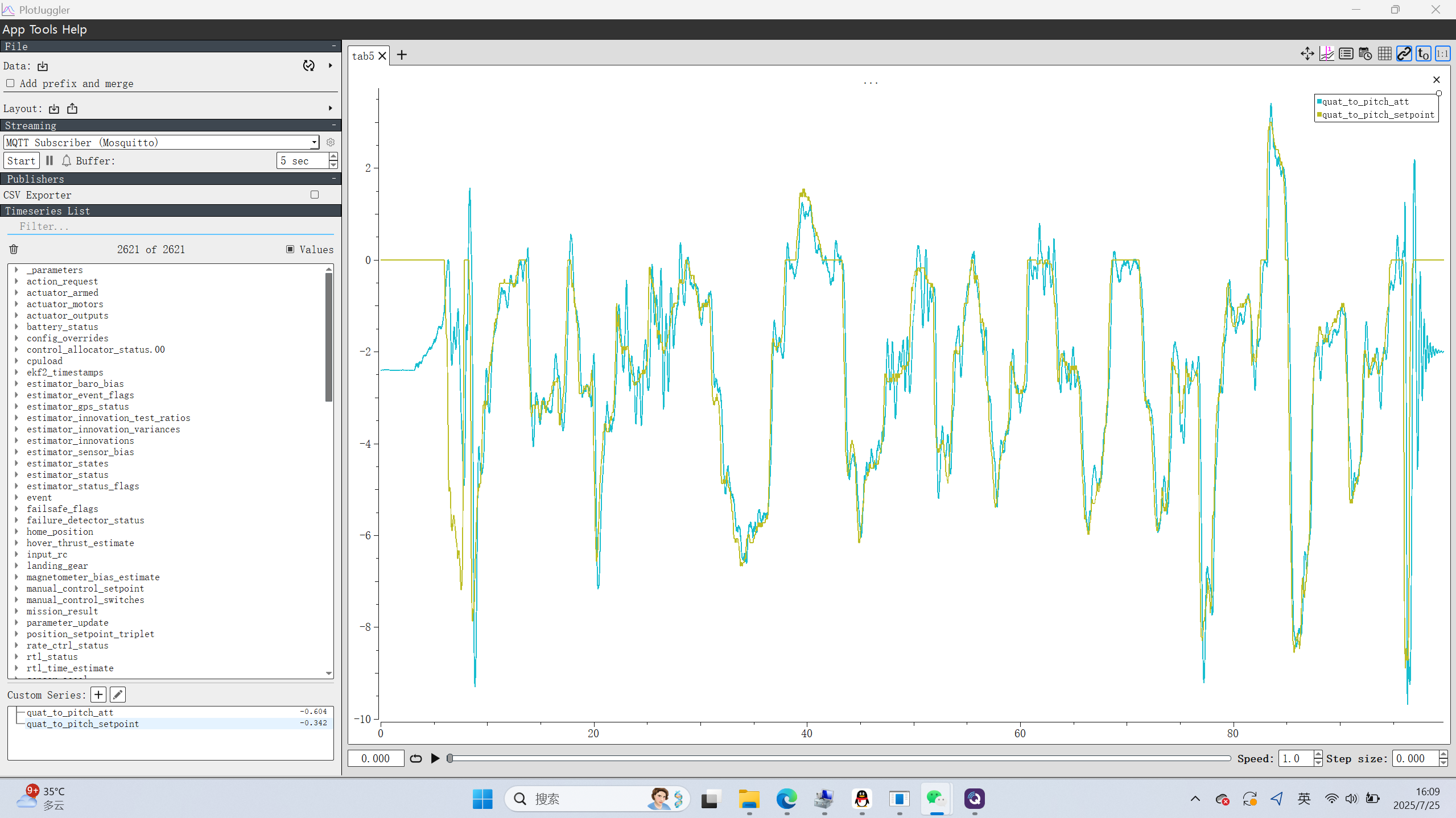
从上面的数据来看, 角度环跟踪始终是可以的, 但是为了让角速度环跟踪的更号一些, 我还需要再调一调。 我继续把角速率环降低0.01, 然后看看效果。 将MC_ROLLRATE_P从0.12降低到0.11. 将MC_PITCHRATE_P从0.13降低到0.12
第七次飞行, 我现在来动一下I吧, 因为目前并没有不到位, 所以这个I可以减。 mc_rollrate_i从0.2改成0.1 mc_pitch_i从0.2改成0.1