2021年国赛植保无人机实现思路_2021电赛题目植保无人机
一.序言
2025年全国电赛临近,我这边刚刚考完期末就得进实验室备赛。由于25年是国赛,加上去年由于实习与比赛时间冲突的原因没能参加,所以今年压力还是很大的。
之前一直在往控制类的方向靠,今年基于各种原因进无人机组了,相比控制类的话它对硬件方面的要求会低很多。
说明:
对于大致框架与启动代码,我的飞控厂家无名创新已有提供,但是由于注释的篇幅原因我个人认为它的注释比较晦涩,如果基础不好还是很难上手,对于想通过厂家代码直接学会怎么用的同学还是不太友好,所以本文只针对与和我一样使用盘古飞控TIDronePilot 的同学,同时整个代码涉及侵权无法提供,只是针对该飞控给出2021年植保题我整理后的实现思路。
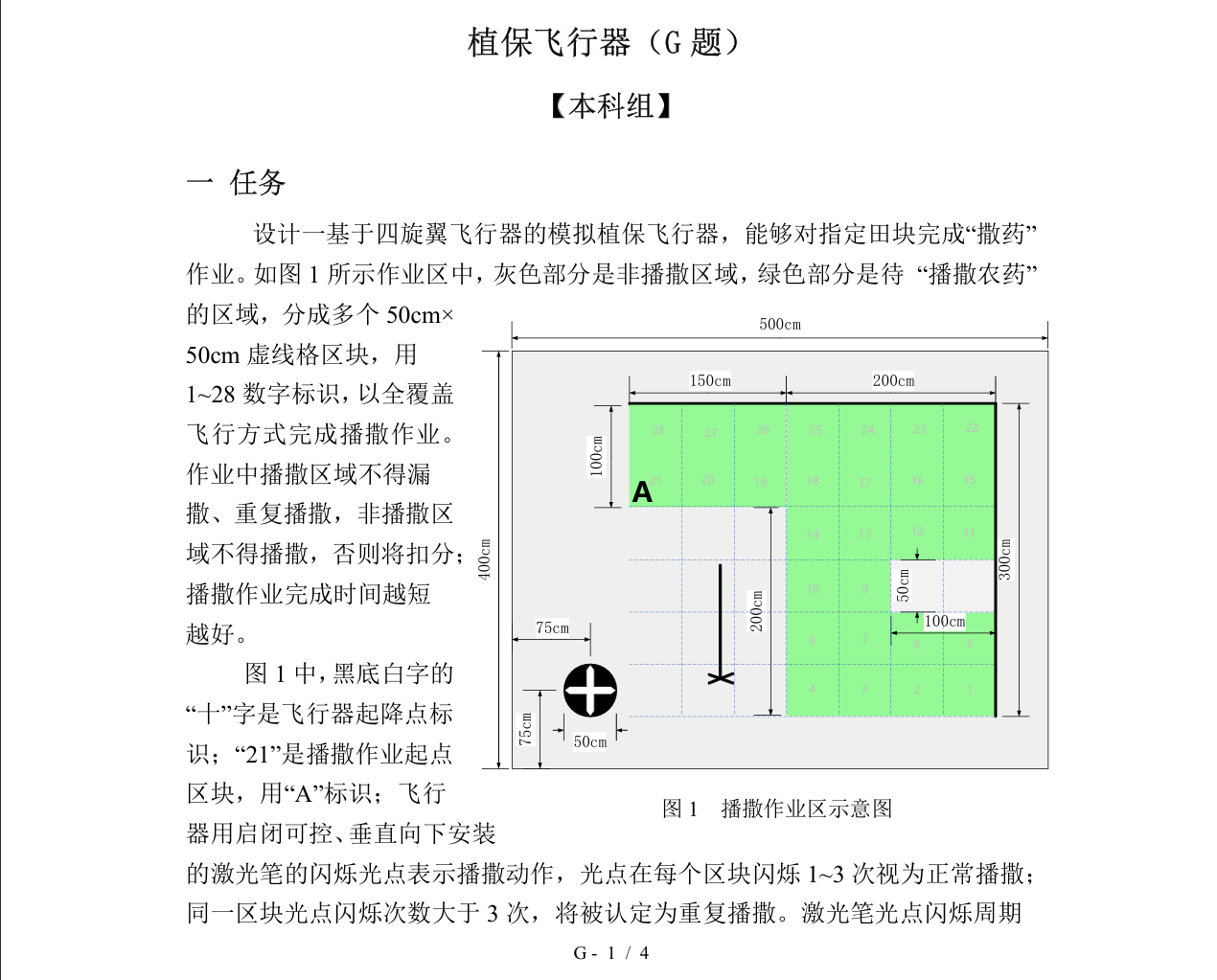
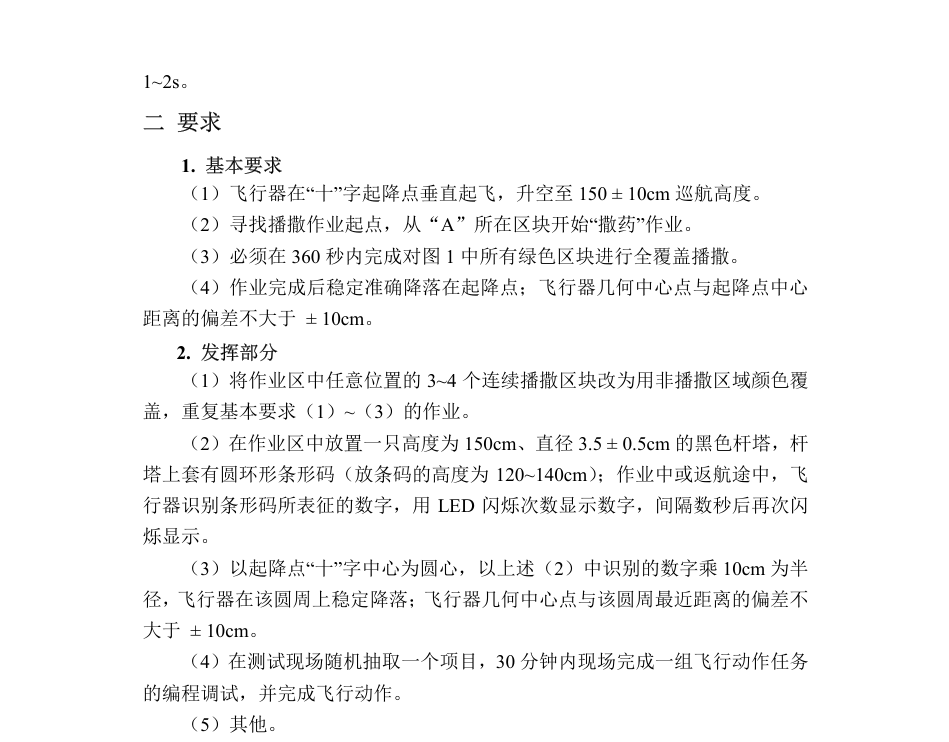
1.题目回顾
先来回顾一下题目:
2.配件介绍
我的无人机大部分配件都是无名创新的,包括飞控、树莓派、TOFSense模块等重要配件,至于机甲、电机电调大家随意选择即可,我的是牛牌的。
这里重点介绍飞控,芯片型号是TI官方芯片TM4C123GH6PZ,与我之前常用的stm32F1系列不同,但代码执行逻辑都大同小异。
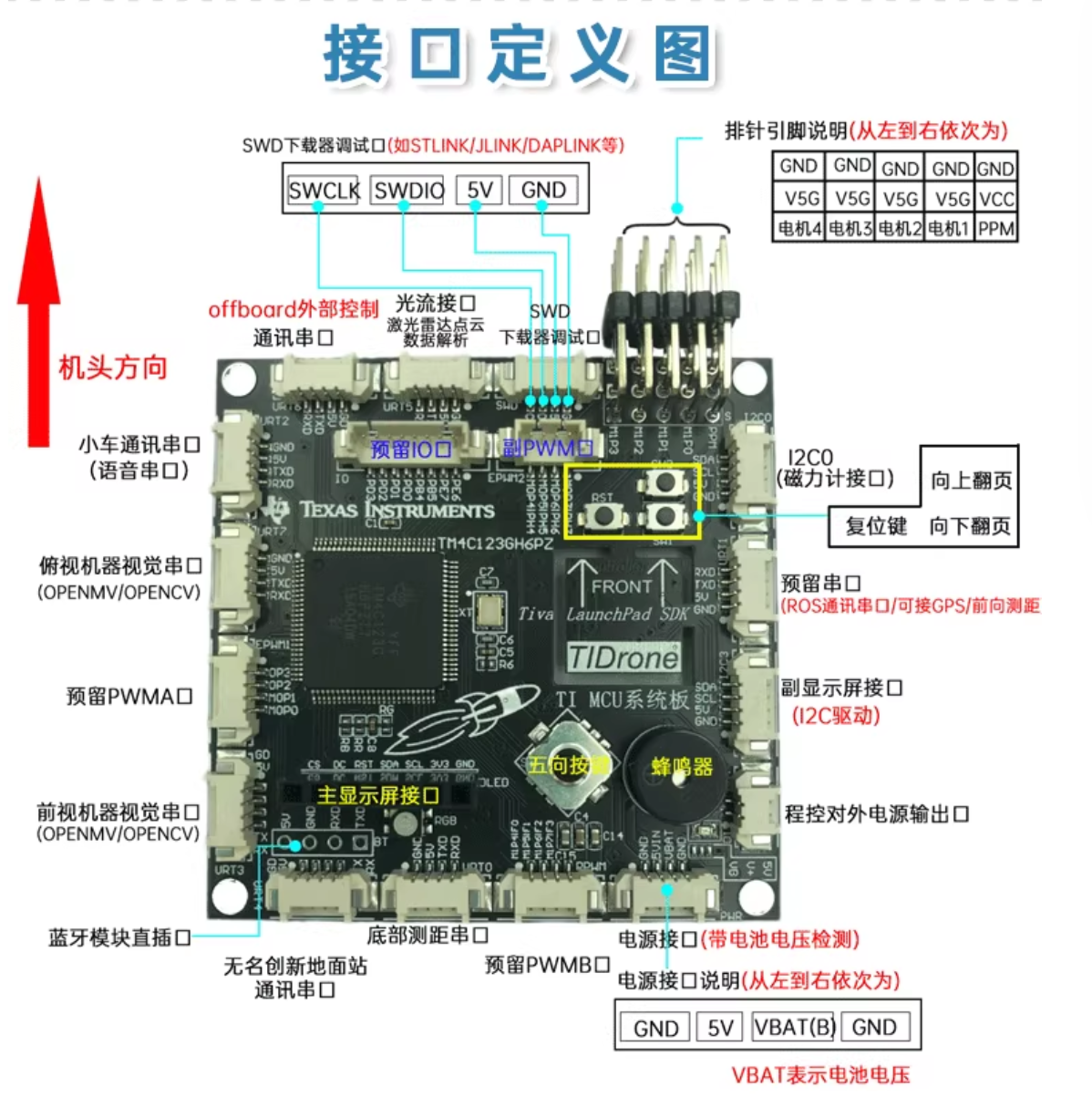
硬件连接不多做介绍,b站很多视频。需要注意的是测试过程中一定不要给飞控12v!!!我们组就是这个原因把电源板的12v短暂的接到了飞控上,立马烧了。如果是在临近比赛烧坏那基本相当于白做了。
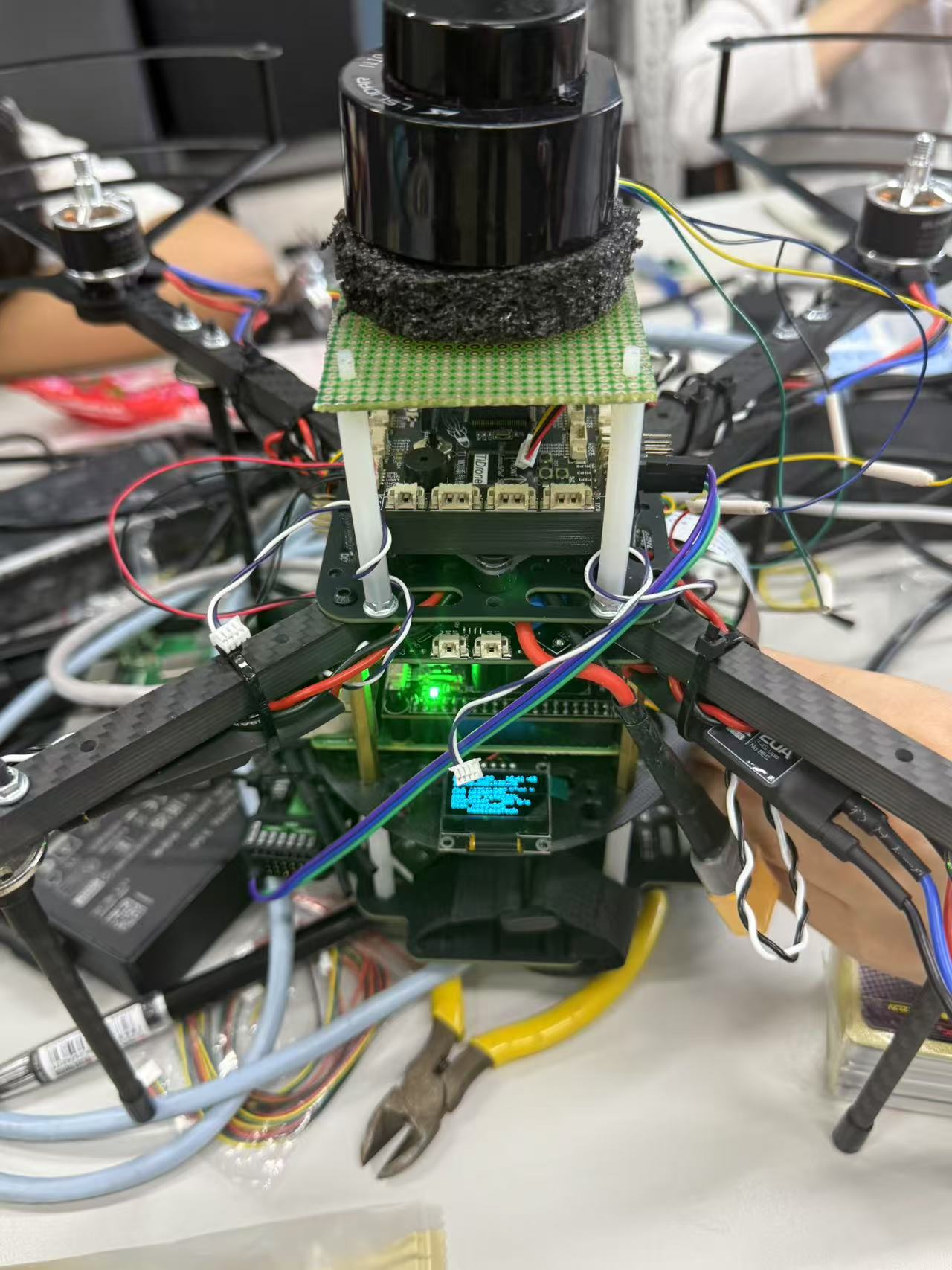
这里我拍的很丑,具体成品参考淘宝无名的厂家即可。
二.基础部分
对二次开发来说,底层部分无名厂家已经做好了,重点要关注整个过程的逻辑,把动作拆分即可。
这里的基本要求共四个步骤:
首先要明确电赛过程是禁止使用遥控器的,所以我们先得思考自动起飞——基础部分——发挥部分的切换怎么实现。这很简单,整个大框架的选择可以在Developer_Mode.c执行,先实现宏观选择,然后将不同的模式设置为不同的case,在选择SDK模式后,即可实现我们想要的功能。后面的编写也是一样,分文件编写有利于我们对整个过程的进一步理解。
接下来进入Subtask.c的介绍,也就是我们整个过程的具体实现逻辑。
先来看看在整个过程中起着至关重要作用的几个全局变量:

我们整个过程的实现实际就是无数个小动作的集合,那么我们如何在一个动作结束之后进入另一个动作的线程?这就用到了第一个变量——flight_subtask_cnt,将其作为每个线程的if判断逻辑,在我们每个线程结束后,自加即可进入下一线程。
flight_global_cnt的作用就没有那么直观了,“全局计数器,用于判断是否到达“其实是一个很抽象的概念。其实,它就是我们用于判断是否达到我们目标点的一个变量,用于减小误差,有着十分重要的作用,因为整个飞行过程的不可控因素太多了,我们不能简单的认为当前位置==目标位置就实现了要求。它需要和以下两个常量配合使用。

在每一个执行逻辑里面,我们都可以通过这种逻辑实现,误差距离小于阈值(dis_cm <= Waypoint_Fix_CM1 )” 一定时长(累计计数达到 Waypoint_Fix_Cnt1 对应次数,对应代码里的 0.05s 逻辑),避免单次 / 瞬时满足条件就判定到位的误判,让航点 “到达并稳定” 的状态判定更精准,符合实际飞行控制中需要稳定在目标点的需求。

execute_time_ms则用于给子线程设置执行时间,可以通过它的自减有效控制每一个子线程的运行时长,避免卡死与超时。
这三个全局变量起着支架的作用决定整个过程的执行,接下来进入正式的实现环节。
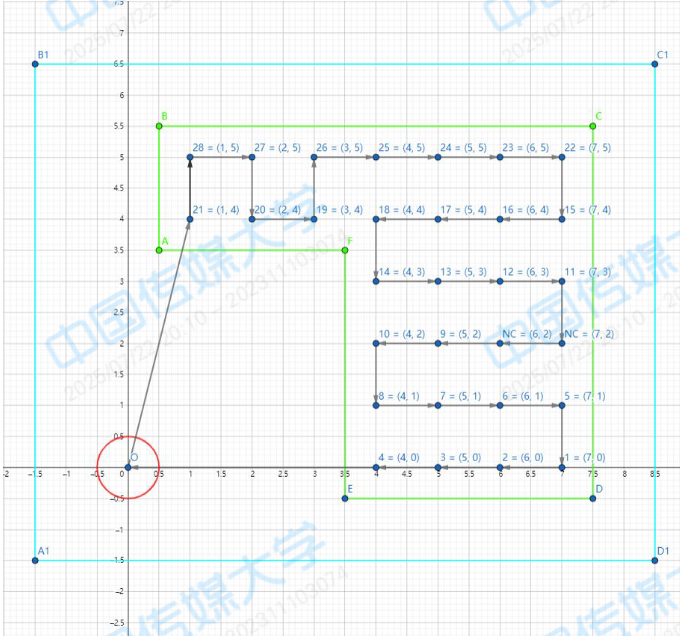
对于基础部分,实现思路是起飞——飞到A点——遍历除最后一个点外的所有点——遍历最后一个点——返回起飞点——进一步确定是否到达起飞点——降落

由于最后一个点之后飞向原点,执行时间与其他点不一致,所以处理需要额外考虑。
const int16_t work_waypoints_table[2][32]={{0,1,1,2,2,3,3,4,5,6,7,7,6,5,4,4,5,6,7,7,6,5,4,4,5,6,7,7,6,5,4,0},{0,4,5,5,4,4,5,5,5,5,5,4,4,4,4,3,3,3,3,2,2,2,2,1,1,1,1,0,0,0,0,0}};//坐标系建立建好虚拟坐标系以后,分工好我们每个位置的执行时间, 接着根据题目要求——每个模块50cm,建立好我们实际的work_waypoint_generate即可。
每个线程的具体逻辑都大同小异,即是否稳定到达当前航点——稳定后确定目标点坐标——决定是否撒药并进入下一线程,关键就是一定要确保稳定后再进行相应操作,这里给出遍历的实现代码:
if(flight_subtask_cnt[n]<31)//遍历{basic_auto_flight_support();//基本飞行支持软件//判断是否到达目标航点位置if(flight_global_cnt[n]<Waypoint_Fix_Cnt1)//时间要求是否达到??{float dis_cm=pythagorous2(OpticalFlow_Pos_Ctrl_Err.x,OpticalFlow_Pos_Ctrl_Err.y);if(dis_cm<=Waypoint_Fix_CM1)//距离是否超过误差??? flight_global_cnt[n]++;else flight_global_cnt[n]/=2;}else//满足要求,即到达目标航点位置{execute_time_ms[n]=work_time_gap[flight_subtask_cnt[n]]/flight_subtask_delta;//子任务执行时间target_position.x=base_position.x+work_waypoints[0][flight_subtask_cnt[n]];target_position.y=base_position.y+work_waypoints[1][flight_subtask_cnt[n]];target_position.z=base_position.z;Horizontal_Navigation(target_position.x,target_position.y,target_position.z,GLOBAL_MODE,MAP_FRAME);flight_subtask_cnt[n]++;flight_global_cnt[n]=0;if(Opv_Top_View_Target.trust_flag==1)//到达目标航点后,判断底部是否为农作物{laser_light_1.reset=1;laser_light_1.times=1;//闪烁1次}}}对于我的飞控来说,PD1连接激光笔实现打点操作,laser_light_1可对其进行控制。
还需要注意的是,这里的Opv_Top_View_Target.trust_flag==1实际是视觉模块openmv的作用,具体实现需要在树莓派执行,树莓派与飞控协作,SLAM建图、判断航电、扫描二维码等视觉操作在树莓派执行,串口通信后,飞控判断完再给出具体的执行要求。
整个基础部分并不难,我认为难点就在任务的拆分,以及对实际过程中是否精确到达的处理,还有与视觉部分的协作分工,4天的时间,一定不要着急上手,对整个过程有着清晰的子线程拆分后再测试。
三.发挥部分
基础部分实现不再赘述,在原来的基础上,接下来——降低高度——判断是否到达都很容易想到,但是我们最后的点位在边沿区域,雷达很容易将外界物体识别为目标,如何解决?
这里有一个很聪明的做法,先飞到14号位置,再进行操作,即可避免失误,即
飞到14号区域——偏航运动使得朝向塔杆——识别二维码——闪烁——间隔——闪烁
创新部分最难的就是对杆部分的处理。首先是偏航角,这里要用到PID算法的P部分:比例项。
控制无人机的偏航角度,通常有一个目标值(期望达到的角度)和一个实际值(当前实际的角度)。系统的任务就是通过某种控制手段,让实际值尽可能快速、准确地接近目标值。对于比例控制(P 控制)的核心思想是:控制量与偏差成正比。对于无人机系统,以target_yaw_err作为我们实际航偏角的偏差,差值越大,说明无人机偏离目标偏航角度越远,需要的调整力度也就越大。我们设expect_yaw_gyro(期望偏航角速度),它即是比例控制器的输出结果,它会被传递给无人机的飞行控制系统,用于驱动无人机的相关执行机构,从而让无人机按照期望的角速度转动,逐渐减小偏航角度误差,达到期望的偏航角度。
接下来控制偏航角的控制模式设置和输出限制即可,这里需要知道ROTATE模式,在此模式下,无人机将根据yaw_outer_control_output的值调整偏航角,实现对准操作。同时由于电机的最大负载限制,所以我们一定要用constrain_float函数将输入值限制,否则可能导致失控。接下来按照偏航角的误差在一定范围内的条件进行对准操作即可。
float expect_yaw_gyro=Total_Controller.Yaw_Angle_Control.Kp*target_yaw_err;//期望偏航角速度Flight.yaw_ctrl_mode=ROTATE;Flight.yaw_outer_control_output=constrain_float(expect_yaw_gyro,-10,10);if(ABS(target_yaw_err)<=5.0f)//只有当偏航角度比较小时,才靠近杆{float dis_err=min_dis_cm-50;//设定杆到无人机中心的距离,非摄像头到杆距离,可根据实际轴距、视觉处理模块安装位置以及识别情况适当调整// dis_err=constrain_float(dis_err,-20,20);// OpticalFlow_Y_Vel_Control(Total_Controller.Optical_Position_Control.Kp*dis_err);// OpticalFlow_X_Vel_Control(0); 光流实现速度控制--替换为SLAM实现速度控制 // 1. 计算Y方向目标速度(对应原光流Y方向控制) float target_vy = Total_Controller.Optical_Position_Control.Kp * dis_err; // 2. X方向目标速度设为0(对应原光流X方向控制) float target_vx = 0; // 3. 将目标速度赋值给SLAM速度控制器 Total_Controller.Latitude_Speed_Control.Expect = target_vy; // Y方向速度期望 Total_Controller.Longitude_Speed_Control.Expect = target_vx; // X方向速度期望 // 4. 调用SLAM位置控制函数执行速度控制(假设SLAM数据结构体为slam_ins) slam_control_poshold(&uav_ins);header_fix_flag=1;}else//否则原地悬停{// OpticalFlow_Control_Pure(header_fix_flag);// header_fix_flag=0; 光流悬停 // 若需要悬停,可将目标速度设为0后调用SLAM控制 Total_Controller.Latitude_Speed_Control.Expect = 0; Total_Controller.Longitude_Speed_Control.Expect = 0; slam_control_poshold(&uav_ins); header_fix_flag=0;}Flight_Alt_Hold_Control(ALTHOLD_MANUAL_CTRL,NUL,NUL);//高度控制if(barcode_flag==1)//只要识别到了二维码,提前结束对准塔杆、靠近任务{flight_subtask_cnt[n]=36;flight_global_cnt[n]=0;//识别到条形码后,重新回退到14区块,避免直接返航过程中撞到杆target_position.x=base_position.x+4*Scale_Param;target_position.y=base_position.y+3*Scale_Param;target_position.z=Barcode_Height_CM;Horizontal_Navigation(target_position.x,target_position.y,target_position.z,GLOBAL_MODE,MAP_FRAME);}要说明的是我的无人机没有光流,所以原先通过光流控制水平移动的代码我换成了SLAM的,但实现目的都是一致的。
为什么要退回14号区域?代码注释加上前面坐标图已经很清楚了,直接返回可能引发撞杆。
接下来的部分就简单了,实现闪烁——间隔——再闪烁即可,唯一需要注意的是,关于预留时间部分:execute_time_ms[n]=(barcode_id*1000+3000)/flight_subtask_delta。
然后回到原点下方格子——对准机头——设立目标点并降落即可。这里的对准机头需要引入AZIMUTH模式,我的理解是绝对角度控制模式,在该模式下,无人机的控制目标是让机头精确指向某个绝对航向角(如正北方向、预设角度等),而非像ROTATE模式那样控制旋转角速度。
给出开始对准机头的代码,后面再利用AZIMUTH模式类似。
else if(flight_subtask_cnt[n]==40)//开始对准机头,赋值只执行一次{Flight.yaw_ctrl_mode=AZIMUTH;//直接控制航向角模式Flight.yaw_ctrl_start=1;//开始控制使能Flight.yaw_outer_control_output =0;//目标角度,等效正北和初始机头朝向一致//OpticalFlow_Control_Pure(0);//光流定点控制slam_control_poshold(&uav_ins);//替换为SLAM定点Flight_Alt_Hold_Control(ALTHOLD_MANUAL_CTRL,NUL,NUL);//高度控制flight_subtask_cnt[n]=41;}最后还是感谢无名创新对本校电赛设备的支持。

