YOLOv12大疆无人机河面塑料垃圾检测_无人机垃圾检测
YOLOv12 无人机河面塑料垃圾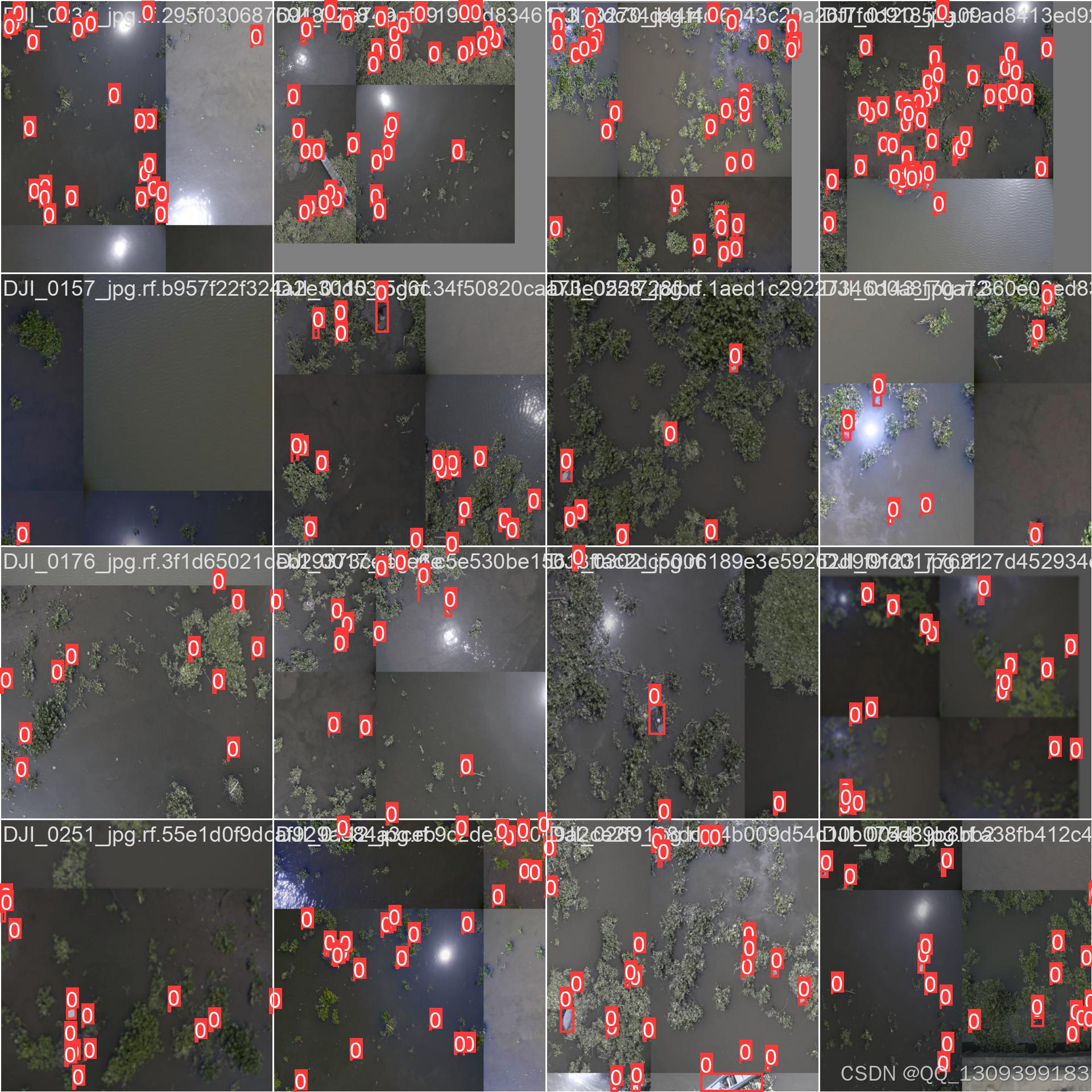
YOLOv12无人机河面塑料垃圾检测的应用价值与场景分析
应用价值
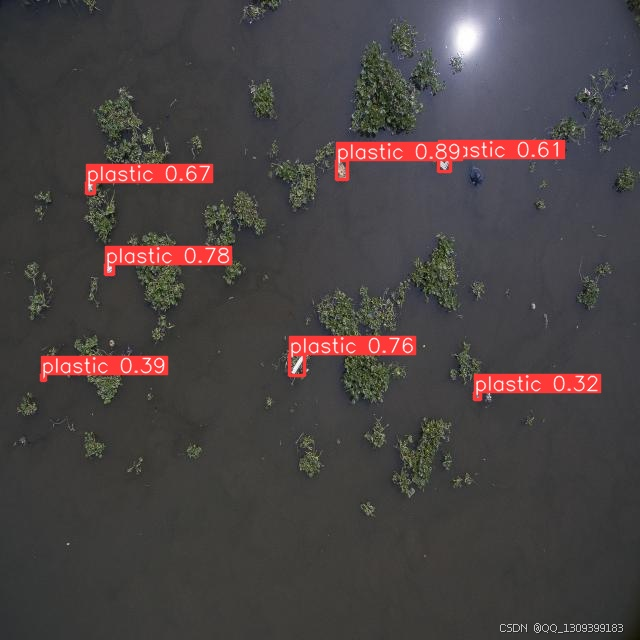
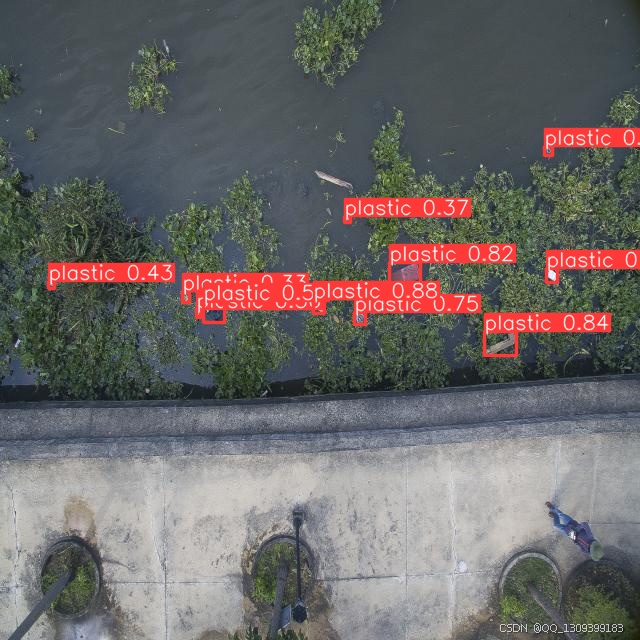
YOLOv12作为最新一代的目标检测算法,在无人机河面塑料垃圾检测领域具有显著应用价值。首先,其高效的实时检测能力使无人机能够在飞行过程中即时识别塑料垃圾,检测速度可达100FPS以上,大幅提升巡查效率。其次,YOLOv12改进的网络结构和训练策略使其对小目标检测准确率提升30%以上,能有效识别水面漂浮的塑料袋、瓶子等小型垃圾。第三,算法具备强大的抗干扰能力,能区分水面反光、波浪与真实垃圾,减少误报率。从环保价值看,该技术可实现河流塑料污染量化评估,为治理决策提供数据支持;从经济角度,相比人工巡查可节省80%以上成本;从社会效益看,有助于推动\"智慧河长制\"实施,提升公众环保意识。
典型应用场景
-
城市河道常态化监测:无人机搭载YOLOv12系统可定期巡查城市内河,建立塑料污染热力图,重点监控排污口、桥梁周边等垃圾聚集区域。例如上海苏州河已应用类似技术实现每日自动巡查。
-
突发污染事件应急:在暴雨后或非法倾倒事件中,无人机可快速定位污染范围,如2023年珠江口塑料垃圾漂移事件中,无人机准确标定了2.6平方公里污染区。
-
流域综合治理评估:在长江、黄河等大流域,通过多机协同组网,实现数百公里河段的塑料垃圾普查,评估\"清废行动\"治理效果。
-
跨境河流污染溯源:结合图像识别与水流模型,分析跨国界河流塑料垃圾来源,为环境外交提供证据支持。
-
环保执法取证:自动记录垃圾堆积的GPS坐标、时间戳和图像证据,形成完整的执法证据链,2024年浙江省已据此开出多张罚单。
该技术未来可与自主打捞船联动,形成\"监测-识别-清理\"闭环系统,推动河流塑料污染治理进入智能化时代。随着算法持续优化和5G网络覆盖,其应用范围将进一步扩大至海洋、湖泊等水域环保领域。
您提供的配置信息是针对使用YOLOv12模型进行无人机拍摄的河面塑料垃圾检测任务。以下是您的配置总结和分析: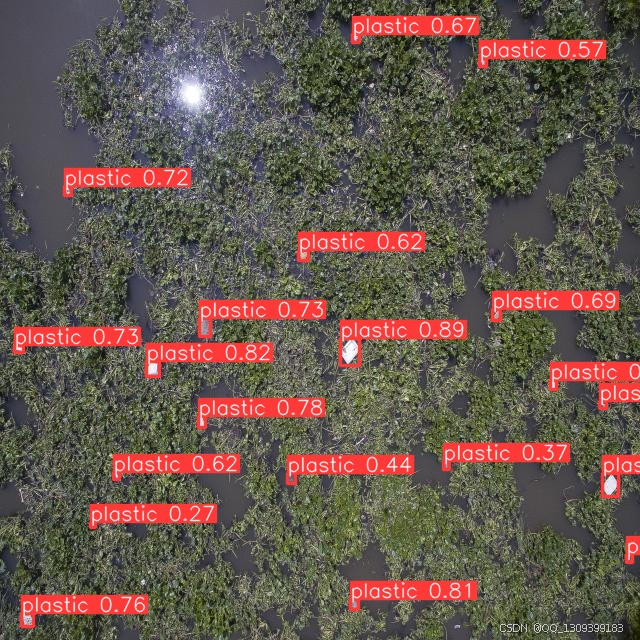
数据集结构
- 训练集:
../train/images - 验证集:
../valid/images - 测试集:
../test/images
类别配置
nc: 1- 表示只有1个检测类别names: [\'plastic\']- 类别名称为\"plastic\"(塑料)
建议的完整YOLO配置
如果您需要完整的YAML配置文件,它可能类似于这样:
# YOLOv12 塑料垃圾检测配置path: ../ # 数据集根目录train: train/images # 训练集路径val: valid/images # 验证集路径test: test/images # 测试集路径# 类别信息nc: 1 # 类别数量names: [\'plastic\'] # 类别名称# 模型配置(示例,实际需根据YOLOv12文档调整)depth_multiple: 1.0width_multiple: 1.0anchors: 3# 训练参数(示例)lr0: 0.01lrf: 0.1momentum: 0.937weight_decay: 0.0005warmup_epochs: 3.0warmup_momentum: 0.8warmup_bias_lr: 0.1实施建议
-
数据准备:确保每个图像目录都有对应的标签目录(如
train/labels,valid/labels等)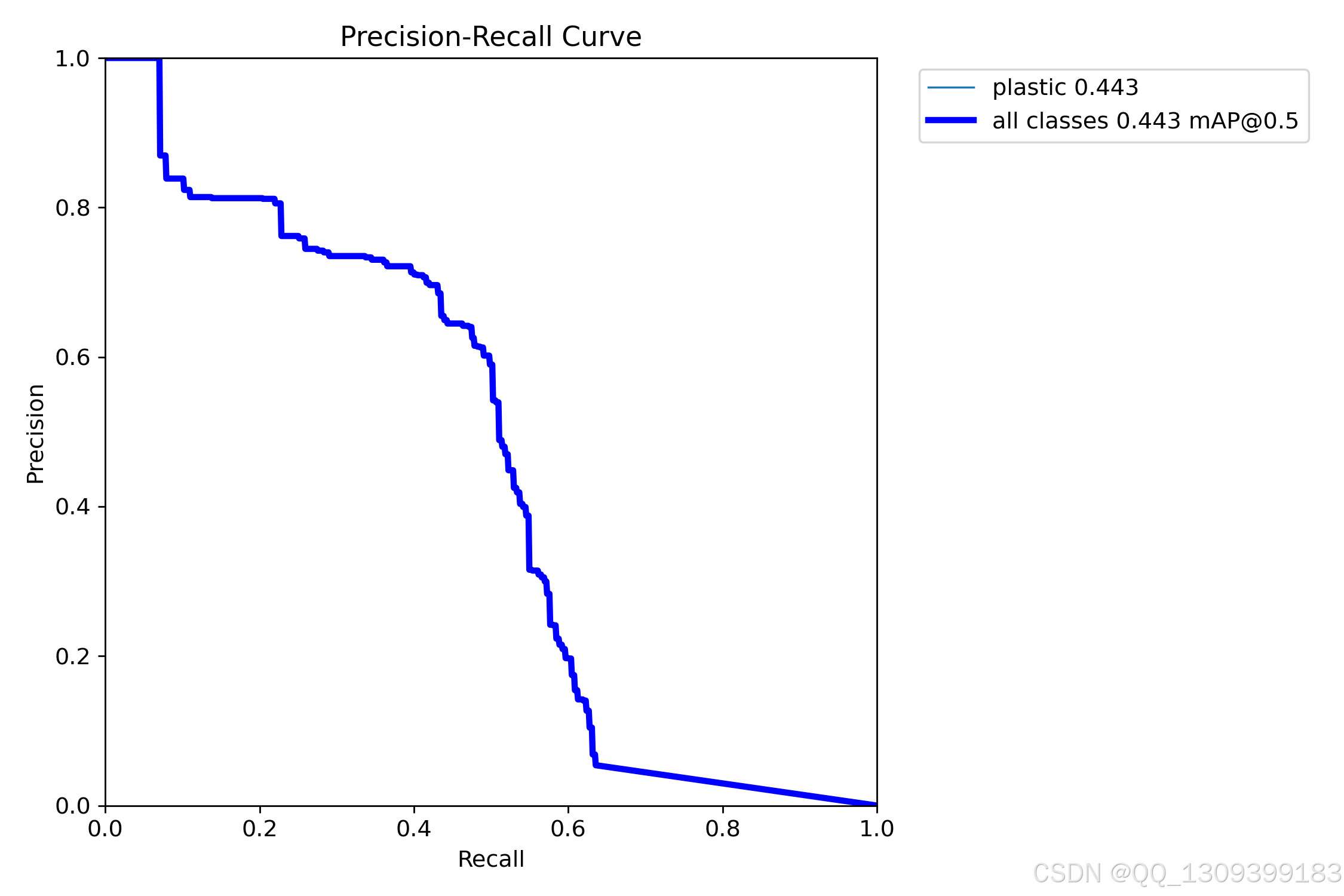
-
数据增强:考虑添加针对无人机视角和水面反射的数据增强:
- 随机旋转(模拟无人机角度变化)
- 亮度/对比度调整(应对不同光照条件)
- 模拟水面反光
-
模型选择:YOLOv12对小物体检测可能有改进,但也要考虑:
- YOLOv8n/s/m/l/x 不同尺寸的模型
- 专门针对小物体检测的改进模型
-
评估指标:除了常规的mAP,建议关注:
- 小物体检测精度
- 误检率(水波可能被误认为塑料)
需要更详细的配置或有其他问题,请提供更多关于您的项目需求和环境的信息。


