你再也找不到更详细的3DGS教程了 —— 一万九千字长文解析3DGS_3dgs 透视投影
参考:
https://www.bilibili.com/video/BV1MF4m1V7e3/
https://blog.csdn.net/2401_86810419/article/details/148811121
https://www.bilibili.com/video/BV1cz421872F?t=233.9
https://wuli.wiki/online/SphHar.html
https://zhuanlan.zhihu.com/p/467466131
特别指出的是SY__007的3DGS较真系列,对本文有极大的启发和参考价值,下文有很多截图也直接来自视频,强烈推荐大家移步小破站,去观看视频。
做雪球?
What is splatting?

关于Splat,在英语中作抛雪球打击到墙面的拟声词。
Splatting是一种体渲染的方法:将3D物体渲染到2D平面
与NeRF中的渲染方法的差异:
NeRF中使用Ray-casting(类似射线求积分):是计算像素点收到发光粒子的影响来生成图像。
3DGS中使用Splatting这种主动的方法,计算发光粒子如何影响像素点
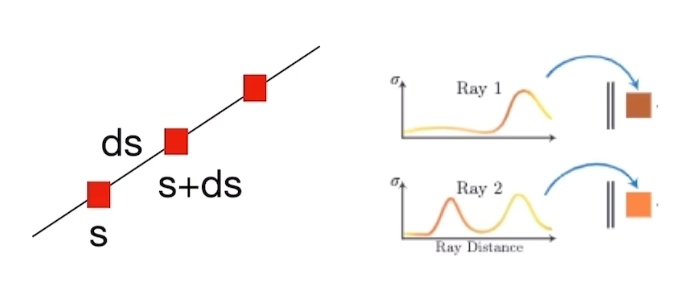
Splatting算法的核心:
1.选择雪球
2.抛掷雪球:从3D投影到2D,得到足迹(footprint)
3.加以合成,得到最终的图像
一:为什么使用核(雪球,Gaussian):
基于Gaussian的数学性质:
1.Gaussian本身是闭合的椭球,经过仿射变换后依旧是封闭的
2.高维Gaussian降维(沿某个轴进行积分)之后依旧是Gaussian
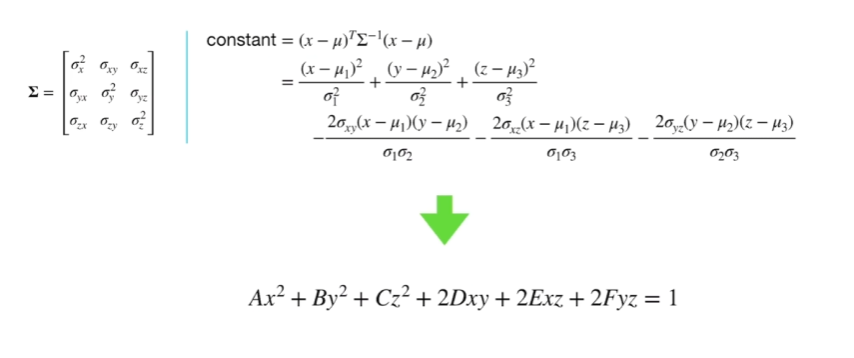
对于椭球Gaussian:
![]()
其中x是三维空间中的点,
μ是高斯分布的均值向量,表示Gaussian的中心点位置
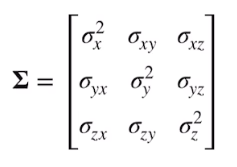
Σ是协方差矩阵,描述Gaussian在3D空间中的形状和方向,它是半正定的
为什么这是一个椭球?
首先去了解 协方差矩阵。
对于Gauss分布:
一维:形状由 均值&方差 决定
高维:形状由 均值&协方差矩阵 决定
对于协方差矩阵:
-
是一个对称矩阵,决定高斯分布形状
-
对角线上元素为x轴/y轴/z轴的方差
-
反斜对角线上的值为协方差,表示x和y,x和z........的线性相关程度
这里直接用SY__007写的: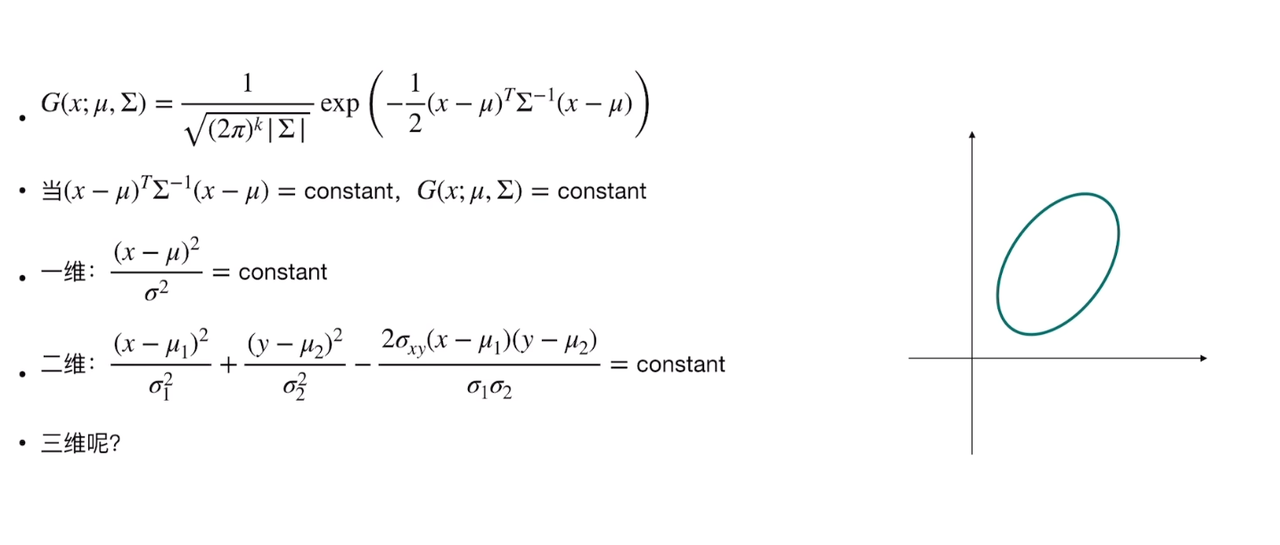
 抛雪球
抛雪球
如何进行参数变换?
从3D->像素的过程:
观测变换
观测变换:从世界坐标系-->相机坐标系
投影变换
投影变换:正交投影 、透视投影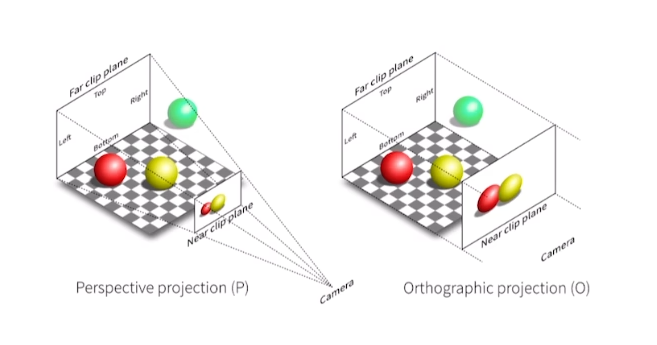
正交投影:
对于立方体[l,r]*[b,t]*[f,n]
1.平移到原点
2.立方体缩放至[-1,1]^3的正方体空间内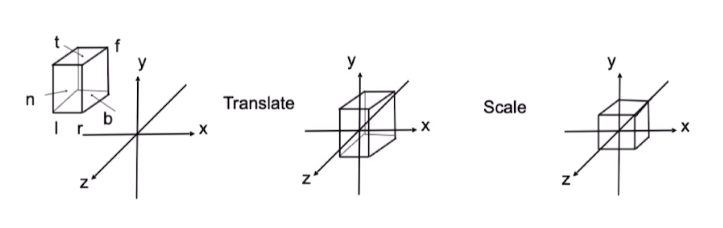
总的来说就是进行了仿射变换,
如题所给的例子的仿射变换即是: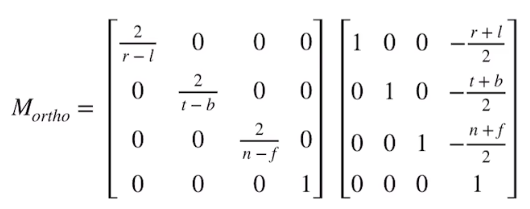
A这里是缩放矩阵
B为平移矩阵
在正交投影中,我们没有考虑对于原本的长方体的长和宽的比例不同,导致的缩放比例不同,其实产生了畸变,这个问题会在之后的视口变换解决
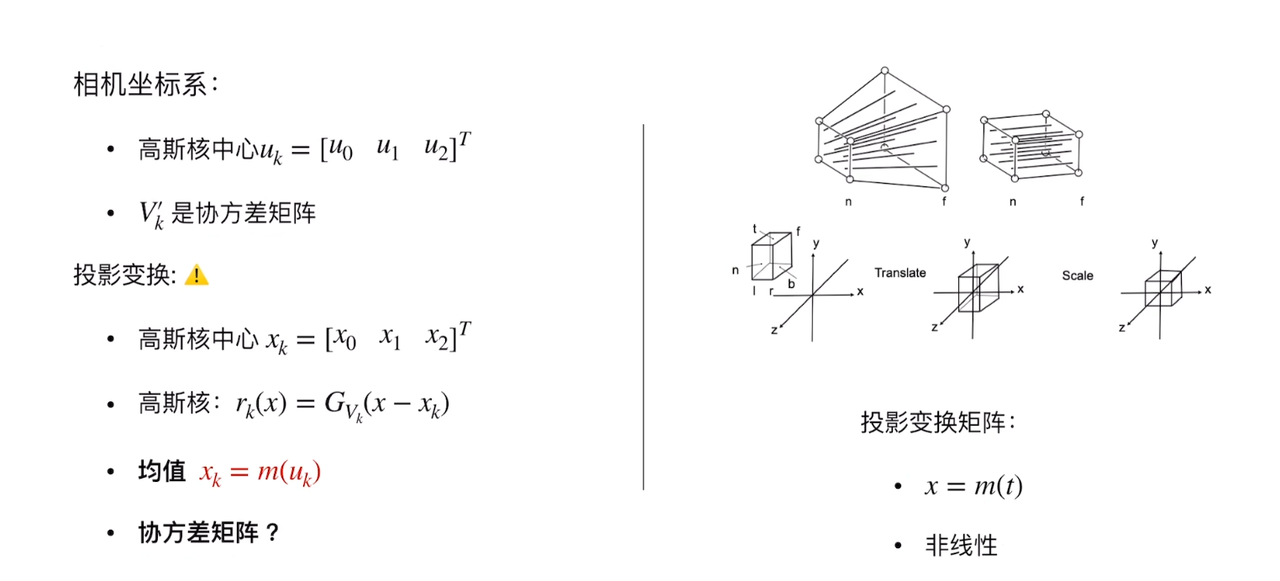
透视投影:
透视投影需要满足近大远小的条件
对于视锥,我们先把他变换为‘立方体’,再进行正交投影
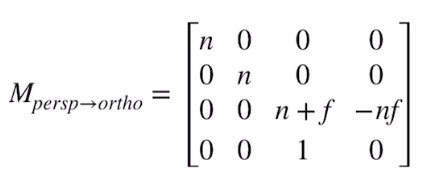
数学过程实在懒得写了,这里直接放上作者手稿一张
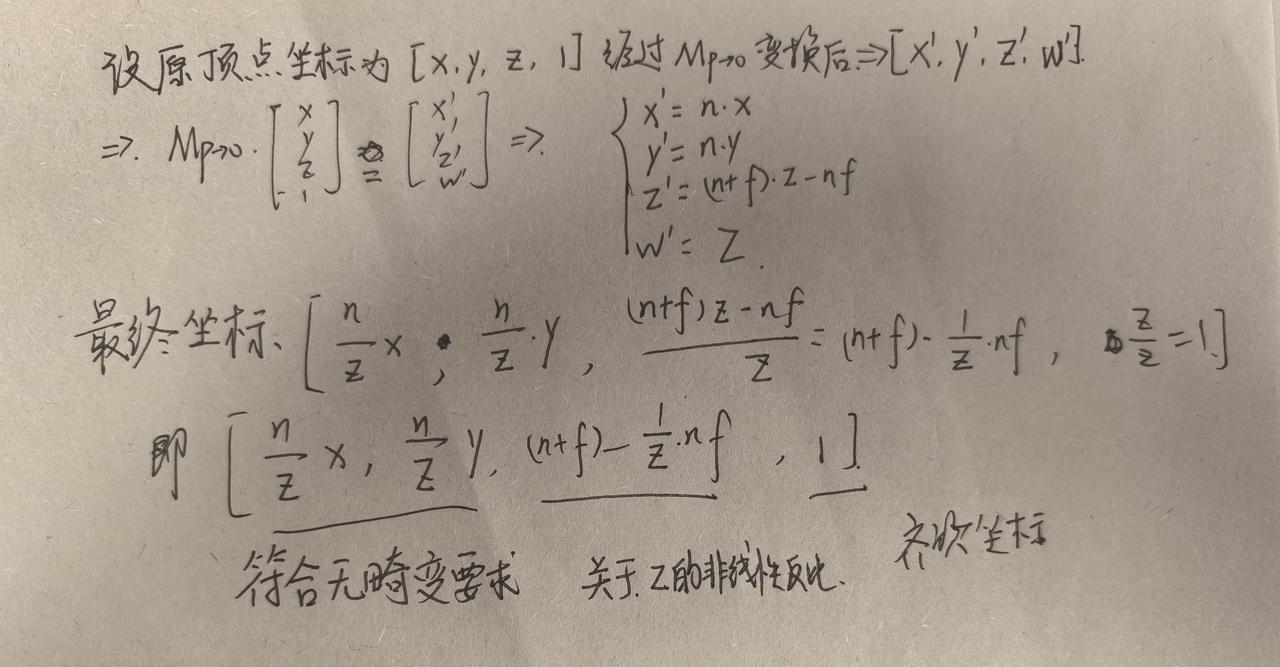
问题?:
透视投影是非线性的,也就是非放射变换,但是高斯椭球经过仿射变换后是高斯,但非仿射变换就不一定。
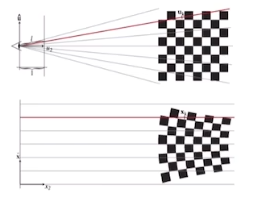
视口变换:
我们从简化的图形渲染管线开始:
3D 顶点 → 模型变换 → 视图变换 → 投影变换 → 裁剪 → 标准化设备坐标 → 视口变换 → 屏幕像素
之前的变换已经将顶点从”模型局部坐标“转换成NDC空间坐标,以OpenGL为例,正交投影下为[-1,1]×[-1,1]×[-1,1]
视口变换的目的就是把可见区域的标准化坐标,映射到显示器的实际像素区域,让图形真正显示在屏幕上。
视口变换的数学实现
核心是缩放+平移的组合,把NDC范围映射到屏幕视口的像素范围:
(1)以OpenGL经典的[-1.1]立方体为例(xy对应屏幕二维,z用于深度缓冲):
-
NDC的x范围:
-
NDC的y范围:
-
NDC的z范围:
(或者[0,1],这取决于深度缓冲装置)
(2)目标视口的像素范围
假设屏幕视口的:
-
左下角像素坐标:(x0,y0)(比如窗口内视口偏移,或全屏时 (0,0))
-
宽度:width(像素数,如 800 )、高度:height(像素数,如 600 )
-
深度范围(可选,用于深度缓冲):[zNear,zFar](比如 [0,255] 或浮点深度 )
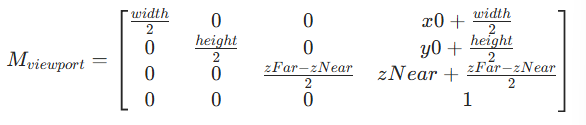
(3)视口变换矩阵与公式
视口变换通过缩放矩阵+平移矩阵,实现对标准化坐标,变换后得到屏幕像素坐标
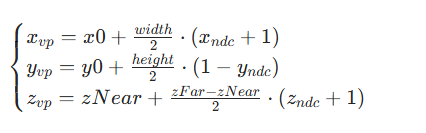
用矩阵形式(齐次坐标下)可以表示为:
对于进行拆解
1.缩放部分:
-
x方向:
把[-1,1]缩放为[0,width]范围;
-
y方向:
把[-1,1]缩放为[0,height]范围,但考虑到屏幕坐标系一般y轴\"向下为上”(与NDC相反),所以使用
反转;
-
z方向:
把[-1,1]缩放为[zNear,zFar](深度缓冲的实际范围)
2.平移部分
-
x 平移
,让缩放后的 [0,width] 起点对齐视口左下角 x0;
-
y 平移
,同理对齐视口左下角 y0;
-
z 平移
,让缩放后的深度对齐 zNear 起点。
视口变换的实际作用:
-
从虚拟坐标到物理屏幕
-
支持多视角渲染
-
深度缓冲的落地
光栅化:
1.光栅化的位置:渲染管线‘矢量-->像素’转换
简单渲染管线流程为:
3D 顶点 → 变换(模型/视图/投影)→ 裁剪 → 标准化设备坐标(NDC)→ 光栅化 → 像素着色 → 帧缓冲 → 屏幕
-
前面的变换,把顶点转成抽象的数学坐标(如NDC空间下的[-1,1]立方体)
-
光栅化要解决:如何把这些矢量图元拆解成屏幕上的离散像素,让每个像素知道“属于哪个图元,该染什么颜色”
2.光栅化的核心任务:图元的“离散化”
(1)输入:图元的“数学描述”
以三角形为例(图形学的最基础图元,复杂模型由三角形拼接),输入是三个顶点的坐标(NDC或视口变换后的屏幕坐标),以及顶点附带的属性(颜色、法向量、纹理坐标等)。
(2)输出:像素的“归属与属性”
输出是覆盖这些三角形的所有像素,并为每个像素插值计算属性(比如/顶点颜色查指出像素颜色,纹理坐标插值出采样位置),供后续像素着色器处理。
3.光栅化的关键步骤
(1)三角形 setup(配置)
计算三角形的边方程和包围盒
-
先找出三角形在屏幕上的最小包围矩形(AABB),只遍历这个范围内的像素,减少计算量;
-
推导三角形三条边的数学方程(如ax+by+c=0),用于判断i像素是否在三角形内
(2)三角形traversal(遍历)
-
对包围盒捏的每个像素(或\'采样点\'),用便方程判断是否在三角形内(比如OpenGL的“winding order”规则,或计算重心坐标)。
-
若像素在三角形内,就标记为属于该三角形,并进入属性插值阶段
(3)属性插值
三角形三个顶点有属性(如颜色、纹理坐标
),用重心坐标对像素属性做线性插值:
假设像素重心坐标为(α,β,γ)(满足)
这里的α,β,γ和数学上的不一样:
假设三角形的三个顶点的坐标分别为:
那么三角形内部的任意一点P(x,y)可以表示为
那么当满足时,P即为三角形重心
则像素颜色
纹理坐标同理
以下是AABB的方法示例:
import numpy as npclass AABB: \"\"\"轴对齐包围盒(AABB)类,用于3D高斯溅射场景中的空间管理\"\"\" def __init__(self): \"\"\"初始化AABB,设置初始边界为无穷大\"\"\" self.min = np.array([np.inf, np.inf, np.inf], dtype=np.float32) # 最小点 self.max = np.array([-np.inf, -np.inf, -np.inf], dtype=np.float32) # 最大点 def expand_by_point(self, point): \"\"\"通过点扩展AABB边界 Args: point: 3D坐标点,形状为(3,)的numpy数组 \"\"\" self.min = np.minimum(self.min, point) self.max = np.maximum(self.max, point) def expand_by_gaussian(self, mean, scale): \"\"\"通过高斯分布扩展AABB边界,考虑高斯的尺度 Args: mean: 高斯分布的均值,形状为(3,)的numpy数组 scale: 高斯分布的尺度参数,形状为(3,)的numpy数组 \"\"\" # 对于3DGS,通常使用3倍标准差作为边界(覆盖大部分分布) self.expand_by_point(mean - 3 * scale) self.expand_by_point(mean + 3 * scale) def expand_by_aabb(self, other_aabb): \"\"\"通过另一个AABB扩展当前AABB Args: other_aabb: 另一个AABB实例 \"\"\" self.min = np.minimum(self.min, other_aabb.min) self.max = np.maximum(self.max, other_aabb.max) def contains_point(self, point): \"\"\"判断点是否在AABB内部 Args: point: 3D坐标点,形状为(3,)的numpy数组 Returns: bool: 点是否在AABB内 \"\"\" return np.all((point >= self.min) & (point <= self.max)) def intersects_aabb(self, other_aabb): \"\"\"判断与另一个AABB是否相交 Args: other_aabb: 另一个AABB实例 Returns: bool: 两个AABB是否相交 \"\"\" # 检查每个轴是否不重叠 if (self.max[0] other_aabb.max[0] or self.max[1] other_aabb.max[1] or self.max[2] other_aabb.max[2]): return False return True def get_center(self): \"\"\"计算AABB的中心坐标 Returns: numpy数组: AABB中心的3D坐标 \"\"\" return (self.min + self.max) / 2.0 def get_extents(self): \"\"\"计算AABB在各轴上的延伸范围(半边长) Returns: numpy数组: 各轴方向的半边长 \"\"\" return (self.max - self.min) / 2.0 def get_size(self): \"\"\"计算AABB在各轴上的大小 Returns: numpy数组: 各轴方向的长度 \"\"\" return self.max - self.min def split(self, axis, position): \"\"\"沿指定轴和位置分割AABB为两个子AABB Args: axis: 分割轴,0=x, 1=y, 2=z position: 分割位置 Returns: tuple: 两个子AABB实例 \"\"\" left = AABB() left.min = self.min.copy() left.max = self.max.copy() left.max[axis] = position right = AABB() right.min = self.min.copy() right.min[axis] = position right.max = self.max.copy() return left, right def __str__(self): return f\"AABB(min: {self.min}, max: {self.max})\"# 3DGS中AABB的典型应用示例def example_usage(): # 创建一个AABB用于包含多个高斯 gaussian_means = np.array([ [0.1, 0.2, 0.3], [1.5, 2.0, 1.8], [-0.5, -1.0, 0.2] ]) gaussian_scales = np.array([ [0.1, 0.2, 0.15], [0.3, 0.25, 0.4], [0.2, 0.3, 0.25] ]) # 构建包含所有高斯的AABB global_aabb = AABB() for mean, scale in zip(gaussian_means, gaussian_scales): global_aabb.expand_by_gaussian(mean, scale) print(\"全局AABB:\", global_aabb) print(\"AABB中心:\", global_aabb.get_center()) print(\"AABB大小:\", global_aabb.get_size()) # 测试点是否在AABB内 test_point = np.array([0.0, 0.0, 0.0]) print(f\"点 {test_point} 是否在AABB内: {global_aabb.contains_point(test_point)}\") # 创建一个新的AABB并测试相交 another_aabb = AABB() another_aabb.expand_by_point(np.array([1.0, 1.0, 1.0])) another_aabb.expand_by_point(np.array([2.0, 3.0, 2.0])) print(\"另一个AABB:\", another_aabb) print(\"两个AABB是否相交:\", global_aabb.intersects_aabb(another_aabb))if __name__ == \"__main__\": example_usage()整体示例代码:
frame = create_canvas(700, 700)angle = 0eye = [0, 0, 5]pts = [[2, 0, -2], [0, 2, -2], [-2, 0, -2]]viewport = get_viewport_matrix(700, 700)# get mvp matrixmvp = get_model_matrix(angle)mvp = np.dot(get_view_matrix(eye), mvp)mvp = np.dot(get_proj_matrix(45, 1, 0.1, 50), mvp) # 4x4# loop pointspts_2d = []for p in pts: p = np.array(p + [1]) # 3x1 -> 4x1 p = np.dot(mvp, p) print(p) p /= p[3] # viewport p = np.dot(viewport, p)[:2] pts_2d.append([int(p[0]), int(p[1])])3dgs中的观测变换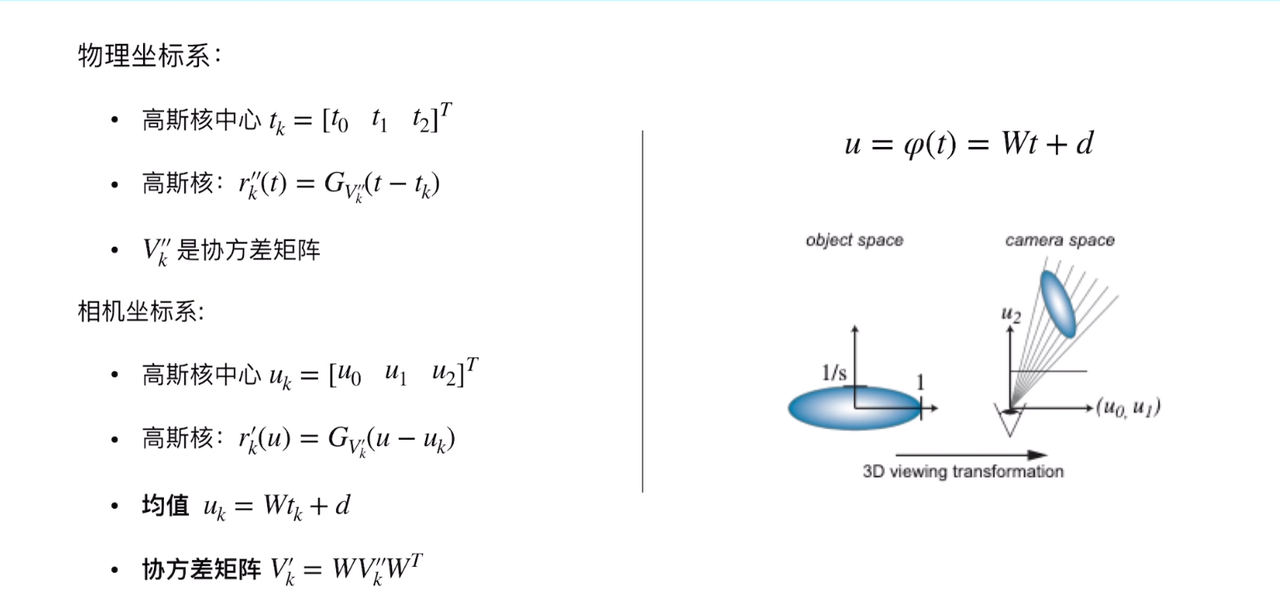
这时候会出现一个问题,对于空间中的点来说进行x=m(t),这样一个非线性的操作
对于协方差矩阵这样的一个Gaussian做非线性操作,无法得到一个正确的Gaussian
所以在3DGS中引入了Jacobian近似矩阵
对于雅可比矩阵,这里加一些关于数学的理解:
关键词:泰勒展开、偏导数、线性逼近
我们以和
为例
这里会得到雅可比矩阵:
这是雅可比矩阵的数学计算方式
那么为什么在3DGS中的是一个雅可比近似矩阵呢?
其实是一个概念,更多的是考虑到了雅可比矩阵使用线性来代替局部非线性的思想,所以叫做近似矩阵。
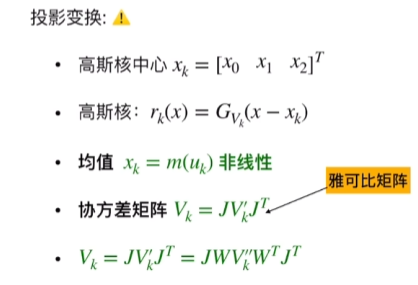
这里使用雅可比矩阵作为 变换矩阵
雅可比矩阵怎么求?
我们将透视投影中的例子延续下来:
我们已经得到NDC空间下的一个点(
,
,
)
根据原本的点,我们显然可以得到
这样我们就得到了对应的函数,也就自然而然可以得到雅可比矩阵
这样我们完成了近似的操作,但是此时均值和协方差在一个坐标系里么?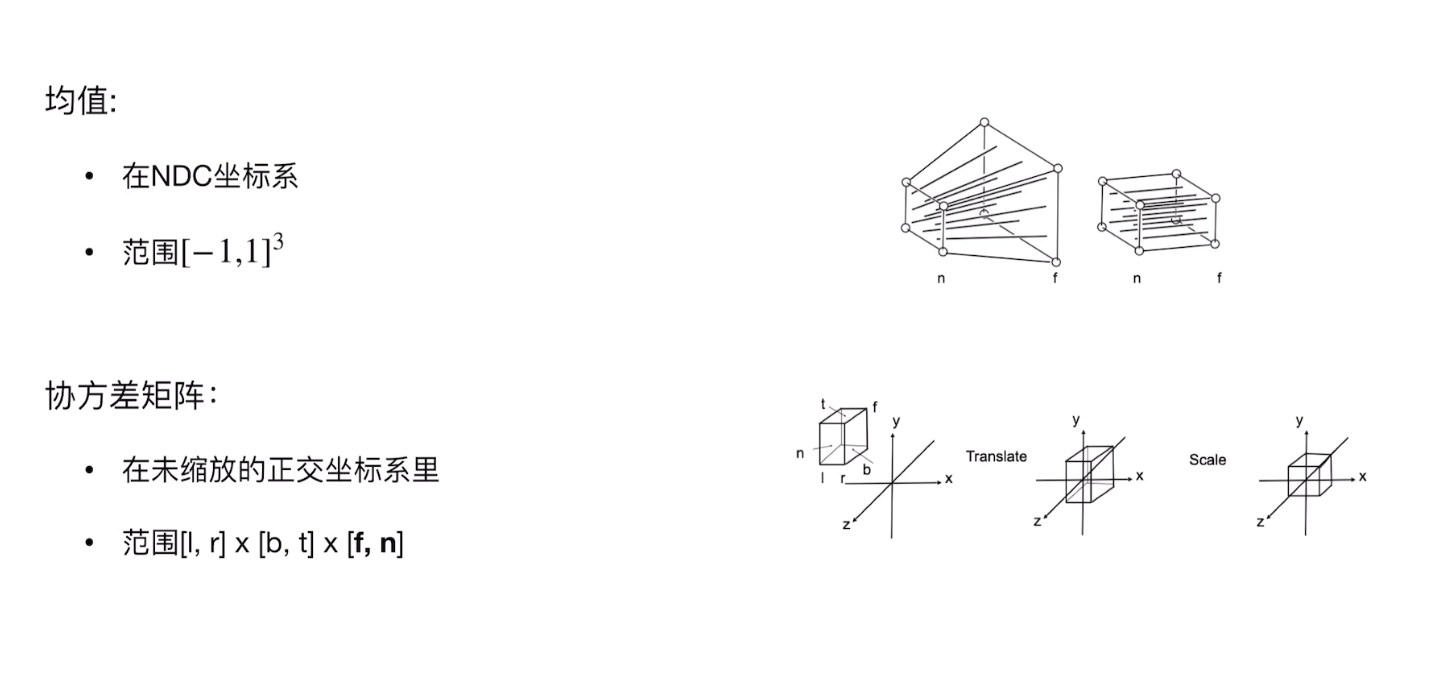
目前为止,对于协方差矩阵,我们只进行了视锥到立方体到正方体的操作,
这是一个未缩放的正交坐标系,和均值所在的NDC坐标系不是一个空间。
所以最后均值需要做视口变换,而协方差矩阵不需要做视口变换
所以在完成以上步骤之后,
我们对高斯核中心进行平移+缩放即可
而对于协方差矩阵则进行足迹渲染
接下来我们来说足迹渲染
足迹渲染(footprint)?
在3DGS中,足迹渲染是将3D高斯投影到2D平面并生成最终图像的关键过程,类似于将雪球抛向墙面留下扩散痕迹,这些痕迹叠加构成最终图像。而叠加构成就是足迹渲染在做的事情。
什么是footprint?
一句话来说:footprint就是这个高斯在图像平面上投影形成的二维椭圆模糊区域。
Footprint渲染流程
1.高斯体素的投影
3DGS首先将每个高斯 g=(μ,Σ)通过相机外参和内参变换,从世界坐标系变换到了相机坐标系,然后投影到图像平面。
过程如下:
-
使用线性相机模型投影中心 μ 到图像上的一个像素位置 u
-
同时,根据协方差Σ与投影变换J计算该高斯在图像上的2D协方差矩阵
,决定它形成的椭圆大小与方向:
其中J是从3D到2D投影的雅可比矩阵。具体计算方式在上文已经写过。
2.按屏幕空间进行排序(Z-buffer Trick)
渲染顺序要根据深度来决定遮挡关系。3DGS使用前向渲染+屏幕空间Z排序:
-
按高斯中心深度z对高斯排序
-
深度近的高斯先渲染,远的后渲染
3.渲染:Rasterization by Splatting
每个高斯体素被当作一个椭圆形纹理,在其图像空间的投影u处进行模糊渲染(splat),具体过程如下:
对于每个像素(i,j),判断它是否落在高斯的足迹范围内(比如3σ的椭圆内部)。
若是,使用 来贡献颜色和不透明度。
-
该公式是二维高斯的密度概率函数,用于像素进行加权模糊。
-
颜色累计采取 Alpha blending,即
4.足迹渲染的优势
-
避免显示表面建模
-
高效
-
连续性好
-
可微
5.可微性分析
我们采取footprint的策略,保证了渲染管线整体过程的可微分,便于计算梯度与反向传播
雪球颜色:
相关基础概念:
首先是一些基础概念的问题:
1.基函数:
以 为例,这里的
就是基函数
我们采用多项式和的形式来拟合任意一条曲线或离散的数据点,这里用到的所有独立的表达式叫做基函数
以傅里叶变换为例,任何一个函数可以分解为若干个正弦和若干个余弦函数的线性组合。在这里正弦和余弦就是基函数
2.球谐函数
关于球谐函数的数学表达是,有小时百科,讲的非常详细,见参考第四个
任何一个球面坐标的函数可以用多个球谐函数近似,这里参考games001的视频
其实,球谐函数就是一组能代表球面上不同位置的值积函数,阶数越高表达能力越强(类似傅里叶级数)。球谐函数只和θ(仰角), Φ(方位角)有关,而与r无关。我们确定半径的方法是 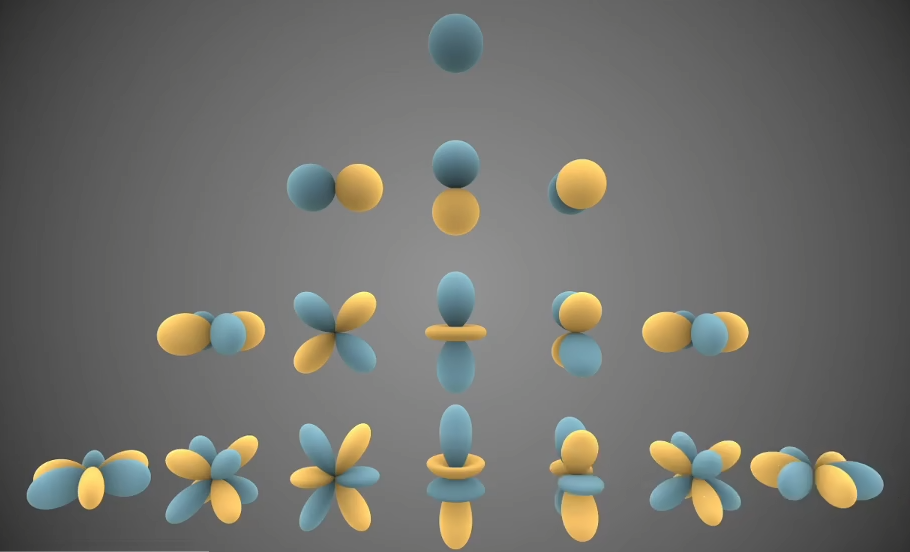
我们以不同阶的球谐函数的线性组合来进行拟合,阶数越高表达越好(类似泰勒展开的线性逼近情况)
如下图,我们可以清楚的看到阶数越高表达能力越强这件事情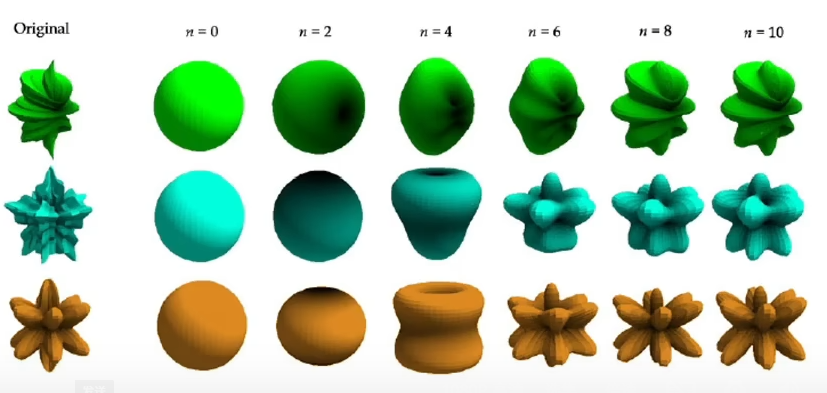
球谐函数的应用
在3DGS中,球谐函数用于表达颜色。
点云颜色(r,g,b)使用球谐函数来表达,r,g,b均用相同的基球谐函数来表达,
对于每个通道,每个基球谐函数的系数不一样。
这使得点云在不同角度展现出不同的颜色,并有利于提高迭代效率(代码中采用到3阶球谐函数(0,1,2,3),参数量为 即3*(1+3+5+7)=3*16=48)
球谐函数在一定程度上可以弱化高频信息,达到平滑的目的,但是本质上来说是一种有损压缩,并且能将离散的信息变为连续信息,可计算梯度并进行迭代
从具体代码上来看:
球谐系数已经被直接给出,如下
SH_C0 = 0.28209479177387814SH_C1 = 0.4886025119092199SH_C2 = [1.0925484305920792, -1.0925484305920792, 0.31539156525252005, -1.0925484305920792, 0.5462742152960396]SH_C3 = [-0.5900435899266435, 2.890611442640554, -0.4570457994644658, 0.330763352901154, -0.4570457994644658, 1.443505721320277, -0.5900435899266435]具体的计算在computeColorFromSH中
def computeColorFromSH(deg, pos, campos, sh): \"\"\" Args: deg:用到球谐函数的阶数,在这里前面已经定义过为3 pos:3D Gaussian的中心位置 campos:相机位置 sh:之前已经定义过的SH系数 \"\"\" dir = pos - campos dir = dir / np.linalg.norm(dir) result = SH_C0 * sh[0] if deg > 0: x, y, z = dir result = result - SH_C1 * y * sh[1] + SH_C1 * z * sh[2] - SH_C1 * x * sh[3] if deg > 1: xx = x * x yy = y * y zz = z * z xy = x * y yz = y * z xz = x * z result = (result + SH_C2[0] * xy * sh[4] + SH_C2[1] * yz * sh[5] + SH_C2[2] * (2.0 * zz - xx - yy) * sh[6] + SH_C2[3] * xz * sh[7] + SH_C2[4] * (xx - yy) * sh[8])return result这样我们完成了关于颜色的计算
为什么球谐函数可以更好的表达颜色?
从直观上来讲,传统的[R,G,B]使用3个参数,而SH则使用了48个参数来表达,实现了颜色的更精细的控制。
在CG的环境贴图中,经常会使用到球形环境贴图 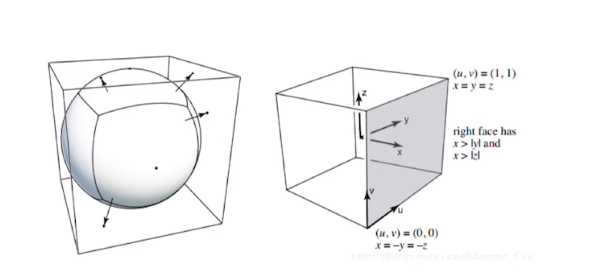
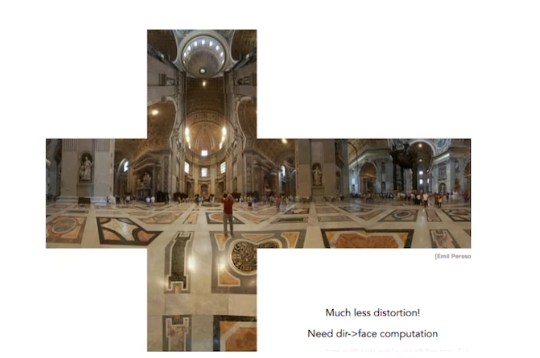
在渲染当中,我们常常使用球谐函数来重建亮度,采用1阶到6阶的球谐函数,当球谐函数的阶数越高,还原的效果越好,同时人的视觉感觉也就越好。
更数学一点来说,
-
得益于SH的源头勒让德多项式的正交性,球谐函数也是正交的,能够对球面上的信号进行极其高效的编码。
-
得益于球谐函数的组合性,我们可以根据场景需求,将低阶的球谐函数用于描述全局的、平滑的光照效果,而高阶球谐函数用于捕捉局部的、细节丰富的光照变化
-
球谐函数也拥有优良的旋转不变性,对于运动的物体或者运动的观测来说,非常有帮助
-
对于点云,球谐函数对颜色信息实现了有效的压缩存储,比起存储复杂的每个方向的颜色值,只是用了少量的参数来近似复杂的颜色分布
合成图片
直观上:
进行α-blending
sheets=[]#这里存储了所有的高斯 for g in gaussians: sheets.append(g.footprint) alpha_blending(sheets) 实际的代码中:
G.printfoot,依然对每个像素进行着色
import numpy as npdef project_gaussian_to_image(gaussian, camera): \"\"\"将3D高斯投影到图像平面,计算其2D足迹参数\"\"\" # 3D高斯中心投影到图像平面 xyz = gaussian[\'xyz\'] uv = camera.project(xyz) # 得到图像平面上的坐标 # 计算协方差矩阵的投影 cov3d = gaussian[\'cov3d\'] # 3D协方差矩阵 R = camera.rotation_matrix # 相机旋转矩阵 K = camera.intrinsic_matrix # 相机内参矩阵 # 将3D协方差转换到相机坐标系 cov_cam = R @ cov3d @ R.T # 透视投影对协方差的影响 # 简化处理:仅考虑缩放和旋转 z = cov_cam[2, 2] # z坐标 cov_2d = (K[:2, :2] @ cov_cam[:2, :2] @ K[:2, :2].T) / (z ** 2) # 计算椭圆参数:主轴、副轴长度和旋转角度 eigenvalues, eigenvectors = np.linalg.eigh(cov_2d) major_axis = np.sqrt(eigenvalues[1]) minor_axis = np.sqrt(eigenvalues[0]) angle = np.arctan2(eigenvectors[1, 1], eigenvectors[0, 1]) return { \'uv\': uv, \'major_axis\': major_axis, \'minor_axis\': minor_axis, \'angle\': angle, \'color\': gaussian[\'color\'] }def render_footprint(footprint, image): \"\"\"将足迹渲染到图像上\"\"\" u, v = footprint[\'uv\'] major = footprint[\'major_axis\'] minor = footprint[\'minor_axis\'] angle = footprint[\'angle\'] color = footprint[\'color\'] # 计算椭圆覆盖的像素范围 # 这里简化处理,实际实现需要更精确的计算 radius = max(major, minor) * 3 # 扩展范围以确保覆盖整个高斯 x_min = max(0, int(u - radius)) x_max = min(image.shape[1], int(u + radius)) y_min = max(0, int(v - radius)) y_max = min(image.shape[0], int(v + radius)) # 对每个像素计算高斯权重并累积颜色 for y in range(y_min, y_max): for x in range(x_min, x_max): # 计算像素到椭圆中心的相对位置 dx = x - u dy = y - v # 旋转坐标以考虑椭圆角度 cos_a = np.cos(angle) sin_a = np.sin(angle) x_rot = dx * cos_a + dy * sin_a y_rot = -dx * sin_a + dy * cos_a # 计算高斯权重 weight = np.exp(-0.5 * ( (x_rot / major) ** 2 + (y_rot / minor) ** 2 )) / (2 * np.pi * major * minor) # 累积颜色(考虑alpha混合) image[y, x] = (1 - weight) * image[y, x] + weight * color像素的颜色
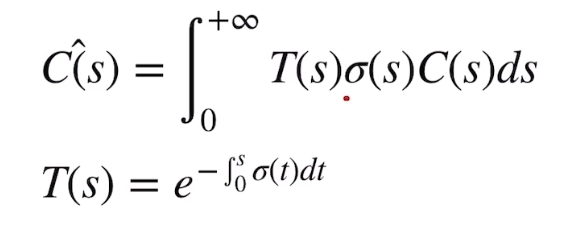
采用类似NeRF的方式,我们去求解每个像素的颜色,公式如下
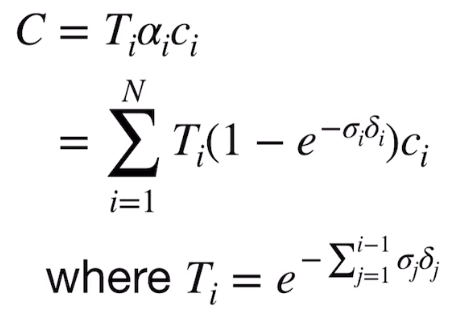
其中的参数:
-
T(s),在s点之前,高斯投影没有被阻碍的概率
-
σ(s),在s点处,高斯投影阻碍的概率密度
-
C(s),在s点处,高斯光出的颜色:
特别的:
-
Splatting没有找粒子的过程(因为所有的Gauss球都是显示存储的)
-
需要对高斯球按照深度z排序(Z-buffer Trick),按照从远到近的顺序去进行footprint
关于T(s),其核心思想为距离相机越近的高斯,对像素的遮挡概率越高,远处高斯的可见性则取决于前方是否有更近的高斯。
具体公式有 或
二者在弱遮挡的条件下是完全等价的,但仍然常用第二个公式
这里就需要回顾一下NeRF中相关的体渲染相关的知识:
如何将光线上粒子颜色进行求和?
同样的,其中的参数:
-
T(s),在s点之前,光线没有被阻碍的概率
-
σ(s),在s点处,光线碰击粒子(光线被粒子阻碍)的概率密度
-
C(s),在s点处,粒子光出的颜色
各点的颜色和概率密度已知,先求T(s)
经过高斯的遍历,我们就可以得到合成的图片
3DGS为什么快?
事实上,3DGS初始化完全依赖于COLMAP的点云图,与NeRF的粒子数本身并无二致,所以实际上,快的原因为GPU运算的优化
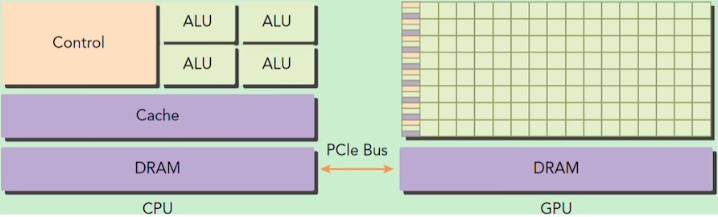
有一个很形象的关于CPU与GPU的话,同样来自SY__007
整体代码中splatting的部分全部使用cuda编写,一个线程负责一个像素,并发线程设计
并将整个图分为16*16的块,对每一个高斯划分区域,这样GPU的每一个block负责一个区,而block与block之间又可以共享内存,节省了显存
训练过程
核心目标是什么?
目标:给定一组已知相机参数的多视角图像,优化一组3D高斯体素,使得它们渲染出的图像与真实图像尽可能相似。
输入与初始化
输入数据:
一组图片
对应每张图的相机参数:
相机内参
相机外参 ,构成投影矩阵
高斯体素初始化:
使用COLMAP 获得 稀疏点云(SfM)初始化:
-
每个3D点初始为一个高斯体素
-
设置初始的协方差为球形,大小根据点密度估计。
-
初始颜色使用图像采样得到
💡3DGS不从零开始学习点的位置,而是从已知点云出发,加速收敛。
可学习参数:
每个高斯体素 拥有一下可学习参数:
: 三维空间中的中心位置
: 协方差矩阵(控制体素形状/朝向/尺度)
: 不透明度(透明度决定是否遮挡其他体素)
: RGB颜色
: 光照相关参数(可选)
训练流程
我们按一个Epoch解析训练流程:
Step1:选取batch
通常一次从多个视角中抽取1~8张图像作为batch
Step2:渲染图像(forward pass)
使用当前高斯体素,通过可微光栅化渲染每张视角图像:
使用GPU实现的rasterizer,生成预测图像
Step3:损失计算
对每张渲染图像与真实图像计算损失:
常用的损失包括:
L2/MSE 图像像素级差异
SSIM 结构相似性指标,鼓励结构保留
LPIPS 感知损失,鼓励纹理和细节还原
透明度正则 控制α防止梯度爆炸
Scale/shape正则 保持体素大小不变形或坍塌
Step4:反向传播&参数更新
自动求导,对所有高斯参数进行反向传播。
使用优化器(如Adam等)更新每一个体素的参数:
<img alt=\"\\theta_{t+1}
训练期间的技巧与工程策略
1.Alpha截断和阈值:
-
低透明度的高斯体素将被剔除
-
阈值可逐步调整(从保守-->激进)(原代码中未进行调整,采用固定值0.005)
代码来自scene/gaussians.py ---> def prune_gaussians(self):
def prune_points(self, mask): valid_points_mask = ~mask optimizable_tensors = self._prune_optimizer(valid_points_mask) self._xyz = optimizable_tensors[\"xyz\"] self._features_dc = optimizable_tensors[\"f_dc\"] self._features_rest = optimizable_tensors[\"f_rest\"] self._opacity = optimizable_tensors[\"opacity\"] self._scaling = optimizable_tensors[\"scaling\"] self._rotation = optimizable_tensors[\"rotation\"] self.xyz_gradient_accum = self.xyz_gradient_accum[valid_points_mask] self.denom = self.denom[valid_points_mask] self.max_radii2D = self.max_radii2D[valid_points_mask] self.tmp_radii = self.tmp_radii[valid_points_mask]实现逻辑如下:
mask = self.opacities.data >= opacity_thresholdself._prune(mask)在train.py中,每N轮进行一次剔除:
if iteration % prune_interval == 0: scene.gaussians.prune_gaussians(opacity_threshold=cfg.alpha_thresh)2.Adaptive Densification(动态密度增长)
初始点云稀疏,细节不够-->动态插值新的体素:
-
根据residual或遮挡区域添加新体素
-
类似NeRF的coarse-to-fine学习(由粗到细)
代码来自scene/gaussians.py --->densify_and_split/clone/prune
def densify_and_split(self, grads, grad_threshold, scene_extent, N=2): \"\"\" 对满足梯度条件的高斯点进行分裂操作,增加场景中复杂区域的高斯点密度 Args: grads: 高斯点的梯度信息,用于判断是否需要分裂 grad_threshold: 梯度阈值,超过此值的点可能需要分裂 scene_extent: 场景范围,用于判断高斯点大小是否合适 N: 每个选中的高斯点要分裂成的新点数,默认值为2 \"\"\" n_init_points = self.get_xyz.shape[0] # 获取当前高斯点的总数 # 处理梯度张量,确保其长度与高斯点数量一致(填充0) padded_grad = torch.zeros((n_init_points), device=\"cuda\") padded_grad[:grads.shape[0]] = grads.squeeze() # 筛选出满足梯度条件的高斯点: # 1. 梯度大于等于阈值 # 2. 高斯点的最大尺度大于场景范围的特定比例(表示该点可能过大,需要分裂) selected_pts_mask = torch.where(padded_grad >= grad_threshold, True, False) selected_pts_mask = torch.logical_and( selected_pts_mask, torch.max(self.get_scaling, dim=1).values > self.percent_dense * scene_extent ) # 为分裂的新点生成参数 # 缩放参数:原缩放的1/(0.8*N),并应用逆激活函数 stds = self.get_scaling[selected_pts_mask].repeat(N, 1) means = torch.zeros((stds.size(0), 3), device=\"cuda\") # 零均值 samples = torch.normal(mean=means, std=stds) # 基于缩放的正态分布采样 # 旋转参数:复用原旋转并重复N次 rots = build_rotation(self._rotation[selected_pts_mask]).repeat(N, 1, 1) # 新点坐标:将采样点通过旋转矩阵变换后,加上原坐标(在局部坐标系中生成新点) new_xyz = torch.bmm(rots, samples.unsqueeze(-1)).squeeze(-1) + self.get_xyz[selected_pts_mask].repeat(N, 1) # 其他参数:继承原高斯点的属性并适当调整 new_scaling = self.scaling_inverse_activation(self.get_scaling[selected_pts_mask].repeat(N, 1) / (0.8 * N)) new_rotation = self._rotation[selected_pts_mask].repeat(N, 1) new_features_dc = self._features_dc[selected_pts_mask].repeat(N, 1, 1) # 直流分量特征 new_features_rest = self._features_rest[selected_pts_mask].repeat(N, 1, 1) # 其余频率分量特征 new_opacity = self._opacity[selected_pts_mask].repeat(N, 1) # 不透明度 new_tmp_radii = self.tmp_radii[selected_pts_mask].repeat(N) # 临时半径 # 将新生成的高斯点添加到模型中 self.densification_postfix(new_xyz, new_features_dc, new_features_rest, new_opacity, new_scaling, new_rotation, new_tmp_radii) # 构建修剪过滤器:原选中的点需要被修剪(已分裂成新点),新生成的点保留 prune_filter = torch.cat(( selected_pts_mask, torch.zeros(N * selected_pts_mask.sum(), device=\"cuda\", dtype=bool) )) self.prune_points(prune_filter) # 执行修剪操作def densify_and_clone(self, grads, grad_threshold, scene_extent): \"\"\" 对满足梯度条件的高斯点进行克隆操作,在需要更精细表示的区域增加相同的高斯点 Args: grads: 高斯点的梯度信息 grad_threshold: 梯度阈值 scene_extent: 场景范围 \"\"\" # 筛选出满足梯度条件的高斯点: # 1. 梯度范数大于等于阈值 # 2. 高斯点的最大尺度小于等于场景范围的特定比例(表示该点可能过小,需要克隆) selected_pts_mask = torch.where(torch.norm(grads, dim=-1) >= grad_threshold, True, False) selected_pts_mask = torch.logical_and( selected_pts_mask, torch.max(self.get_scaling, dim=1).values <= self.percent_dense * scene_extent ) # 克隆选中的高斯点(参数完全相同) new_xyz = self._xyz[selected_pts_mask] new_features_dc = self._features_dc[selected_pts_mask] new_features_rest = self._features_rest[selected_pts_mask] new_opacities = self._opacity[selected_pts_mask] new_scaling = self._scaling[selected_pts_mask] new_rotation = self._rotation[selected_pts_mask] new_tmp_radii = self.tmp_radii[selected_pts_mask] # 将克隆的高斯点添加到模型中 self.densification_postfix(new_xyz, new_features_dc, new_features_rest, new_opacities, new_scaling, new_rotation, new_tmp_radii)def densify_and_prune(self, max_grad, min_opacity, extent, max_screen_size, radii): \"\"\" 综合执行高斯点的克隆、分裂和修剪操作,动态调整场景中高斯点的密度 Args: max_grad: 梯度最大值,用于判断是否需要克隆或分裂 min_opacity: 最小不透明度阈值,低于此值的点会被修剪 extent: 场景范围 max_screen_size: 屏幕空间中高斯点的最大尺寸阈值 radii: 高斯点的半径信息 \"\"\" # 计算平均梯度(累积梯度除以计数) grads = self.xyz_gradient_accum / self.denom grads[grads.isnan()] = 0.0 # 处理NaN值 # 执行克隆和分裂操作 self.tmp_radii = radii self.densify_and_clone(grads, max_grad, extent) # 克隆操作 self.densify_and_split(grads, max_grad, extent) # 分裂操作 # 构建修剪掩码:不透明度低于阈值的点会被修剪 prune_mask = (self.get_opacity max_screen_size # 视口空间中过大的点 big_points_ws = self.get_scaling.max(dim=1).values > 0.1 * extent # 世界空间中过大的点 prune_mask = torch.logical_or(torch.logical_or(prune_mask, big_points_vs), big_points_ws) # 执行修剪操作 self.prune_points(prune_mask) tmp_radii = self.tmp_radii self.tmp_radii = None # 清理GPU缓存 torch.cuda.empty_cache()def add_densification_stats(self, viewspace_point_tensor, update_filter): \"\"\" 累积高斯点的梯度统计信息,为后续的密度调整(克隆/分裂)提供依据 Args: viewspace_point_tensor: 视图空间中的点张量 update_filter: 指示哪些点需要更新梯度统计的过滤器 \"\"\" # 累积视图空间中x和y方向的梯度范数 self.xyz_gradient_accum[update_filter] += torch.norm(viewspace_point_tensor.grad[update_filter, :2], dim=-1, keepdim=True) self.denom[update_filter] += 1 # 累积计数,用于计算平均梯度3.屏幕空间Culling(加速训练)
-
渲染时仅考虑投影在图像内的体素
-
使用bounding-box、depth-range提前裁剪
实现在 CUDA 扩展模块中:diff-gaussian-rasterization/cuda_rasterizer/backward.cu 与forward.cu 中,有条件判断是否渲染该体素
template__global__ void preprocessCUDA(...){ auto idx = cg::this_grid().thread_rank(); // 当前处理的高斯索引 if (idx >= P) // 若索引超出高斯总数,直接返回 return; // 初始化半径和覆盖瓦片数为0(若未更新,该高斯会被默认剔除) radii[idx] = 0; tiles_touched[idx] = 0; // 视锥体剔除:检查高斯是否在相机视锥体内(包括近裁剪) // 若不在视锥体内,直接返回(剔除该高斯) float3 p_view; if (!in_frustum(idx, orig_points, viewmatrix, projmatrix, prefiltered, p_view)) return; // (中间省略:高斯3D->2D投影、协方差计算等) // 计算高斯在屏幕空间的投影中心和覆盖半径 float2 point_image = { ndc2Pix(p_proj.x, W), ndc2Pix(p_proj.y, H) }; uint2 rect_min, rect_max; // 计算高斯在屏幕上覆盖的像素矩形范围(min/max坐标) getRect(point_image, my_radius, rect_min, rect_max, grid); // 屏幕空间范围剔除:若覆盖的矩形区域面积为0(不覆盖任何像素),则剔除 if ((rect_max.x - rect_min.x) * (rect_max.y - rect_min.y) == 0) return; // (后续:保存高斯的渲染所需数据,参与后续光栅化) radii[idx] = my_radius; points_xy_image[idx] = point_image; // ... 其他数据存储}4.LOD(Level-of-Detail)调整
-
训练阶段采取更高分辨率
-
渲染阶段可用多分辨率合成图像,提升速度与质量
代码在train.py中体现的很清楚
resolution_schedule = [ (0, 400), (2000, 800), (4000, 1024), ...]def getTrainResolution(step): for s, res in reversed(resolution_schedule): if step >= s: return res通过OpenGL窗口或CUDA投影传递给渲染器,从而决定屏幕空间尺寸(W,H)、每个高斯的足迹(由像素大小影响)、getReac()计算的tile覆盖范围
3DGS出现的问题
1.Alpha截断策略不完善
原版中采用固定阈值(0.005)对透明高斯剔除
这样静态的设置容易误删潜在有用的高四点,或者保留冗余点,影响收敛效率与渲染质量
改进方法:
使用软阈值+可学习,避免硬截断。
典型工作:GGS、SC-GS
2.Densification策略过于盲目
每N步均匀插入新高斯,密度扩张基于启发式
这样缺少任务驱动性与学习性,不能自适应任务难度或视角覆盖度,造成资源浪费
改进方法:
-
误差驱动density(重建误差高处增加点)
-
衰减或合并冗余点
典型工作:GGS(残差驱动)、Mip-3DGS(基于层级密度)
3.优化流程不稳定
早期使用Adam+特殊正则约束(如位置约束、球面约束等)
这样 高斯之间缺乏明确的结构约束,容易出现重复点、飘移、模糊融合,特别是在边缘或高频区域
改进方法:
邻域结构正则化、引入显示几何结构引导、高斯稀疏化与融合控制、引入 Embedding或语义anchor
典型工作:GGS、SC-GS、SimGS
4.难以处理动态场景
原版的3DGS假设是静态场景,所有的高斯的位置和属性在整个时间序列中是固定的。
这样 无法建模物体运动或相机运动导致的动态变化,限制了其在视频、4D场景等任务中的应用
改进方法:
给每一个高斯绑定一个轨迹函数,并使用时间编码进行时序建模
典型工作:
4DGS(显式控制)
GauSim(使用贝塞尔轨迹建模可学习运动)
DynGS(物体级运动建模)
5.对遮挡与深度模糊处理不佳
采用前向splatting投影到图像平面,对深度排序较敏感
这样 多物体遮挡区域或高深度梯度区域容易出现artifacts(如ghosting、模糊边缘)
改进方法:
Soft visibility:采用softmax-based alpha blending 替代depth sort
Masked loss:遮挡区域增加mask监督
典型工作:VoGS、NeuSplat(借助光线可见性)
6.不具备语义可控性或结构表达能力
每个高斯是独立、孤立的点,没有结构信息
这样 对编辑或语义控制力差
改进方法:
使用learnable instanceID embedding
聚类算法辅助生成 semantic-aware Gaussians
典型工作: SC-GS、SimGS
7.全图高斯遍历效率低
即使使用view frustum culling 等筛选策略,但在高分辨率或大场景下仍计算冗余
这样 渲染速度与高斯数量线性相关,难以scale到高密度场景
改进方法:
LOD:构建多尺度高斯树结构,远处使用低精度
屏幕空间裁剪:只投影到当前帧可见区域
典型工作:Mip-3DGS、GGS
8.精度强烈依赖于SfM初始化精度
一旦SfM的pose不准/点云系数或错位,后续优化直接崩盘
改进方法:
Pose refinement(在训练中微调camera pose)----- GGS-Pose/Neuralangelo
多视角一致性监督 ----- Mip-3DGS、SimGS
典型工作: VGGT+3dgs

