【MCP探索实践】ROS MCP Server:自然语言控制机器人,从此告别复杂指令
系列篇章💥
目录
- 系列篇章💥
- 前言
- 一、项目概述
- 二、技术原理
-
- 1. 自然语言到 ROS 命令的转换
- 2. ROS/ROS2 兼容性
- 3. 无侵入式集成
- 三、主要功能
-
- 1. 自然语言指令解析
- 2. WebSocket 通信支持
- 3. ROS/ROS2 通信支持
- 4. 可扩展性
- 四、应用场景
-
- 1. 机器人开发与调试
- 2. 人机交互界面开发
- 3. 模拟环境中的机器人控制
- 4. 多机器人系统集成
- 五、快速使用
-
- 1. 安装依赖
- 2. 创建虚拟环境(可选)
- 3. 安装 ROS MCP Server
- 4. 配置 MCP Server
- 5. 启动 ROSBRIDGE 服务
- 6. 配置前端应用(如 Claude Desktop)
- 7. 测试控制指令
- 六、结语
前言
随着人工智能与机器人技术的快速发展,人机交互方式正从传统的编程控制向自然语言交互演进。在这一背景下,ROS MCP Server 项目应运而生,它通过将用户输入的自然语言指令(Natural Language Command)转化为 ROS/ROS2 的控制命令,为机器人系统提供了灵活、高效的交互方式。该框架不仅支持跨平台部署,还兼容多种操作系统(Linux、Windows、macOS),并基于 WebSocket 实现了与 ROS/ROS2 的无缝集成。本文将详细介绍该项目的背景、技术原理、主要功能及应用场景,帮助开发者快速上手并应用于实际项目中。
一、项目概述
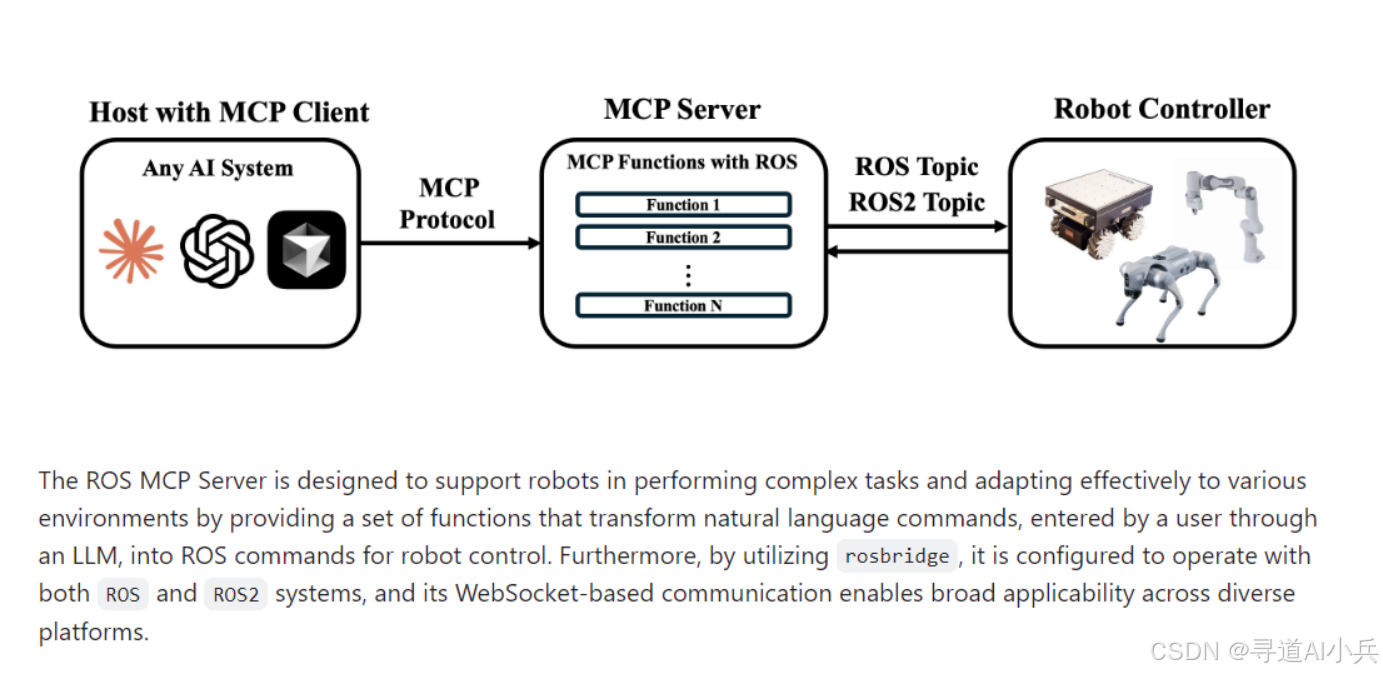
ROS MCP Server 是一个基于 WebSocket 的跨平台机器人控制框架,旨在通过自然语言处理(NLP)技术,将用户输入的指令转化为 ROS/ROS2 的控制命令。该项目支持与 ROS 1 和 ROS 2 的兼容性,能够通过 rosbridge 与机器人系统进行通信,实现对机器人关节、传感器、移动平台等的控制。其核心优势在于无需修改原有机器人代码,即可通过自然语言指令进行交互操作,适用于多种机器人平台和开发环境。
二、技术原理
1. 自然语言到 ROS 命令的转换
ROS MCP Server 的核心功能是将用户输入的自然语言指令(如“前进”、“停止”、“抓取物体”等)转换为 ROS/ROS2 的控制命令。这一过程依赖于以下技术:
- 自然语言处理(NLP) :通过集成的 LLM(大语言模型)或自定义的 NLP 模型,解析用户输入的指令并识别其意图。
- 指令映射机制:将解析后的指令映射到 ROS/ROS2 的标准话题(topic)或服务(service)上,例如
/cmd_vel、/joint_states等。- WebSocket 通信:通过 WebSocket 协议与前端应用(如 Claude Desktop)进行通信,实现用户指令的实时传递与执行。
2. ROS/ROS2 兼容性
ROS MCP Server 支持与 ROS 1 和 ROS 2 的无缝集成,主要通过以下方式实现:
- rosbridge:该项目基于
rosbridge实现与 ROS/ROS2 的通信,使得 WebSocket 通信可以与 ROS/ROS2 的话题和服务进行交互。- 跨平台支持:通过 WebSocket 的通用性,ROS MCP Server 可以在 Linux、Windows 和 macOS 上运行,无需针对不同平台进行额外适配。
3. 无侵入式集成
ROS MCP Server 的设计目标是“无侵入式”地集成到现有机器人系统中,具体体现在:
- 无需修改机器人核心代码:用户只需配置 MCP Server 的参数(如 IP 地址、ROSBRIDGE 服务器地址等),即可通过 WebSocket 与机器人系统进行交互。
- 支持多种机器人平台:无论是移动机器人、机械臂还是多传感器系统,只要其支持 ROS/ROS2,即可通过 ROS MCP Server 实现控制。
三、主要功能
1. 自然语言指令解析
ROS MCP Server 提供了强大的 NLP 支持,能够将用户输入的自然语言指令(如“前进”、“停止”、“抓取物体”、“调整摄像头角度”等)解析为具体的 ROS/ROS2 控制命令。例如:
- “前进” →
/cmd_vel的Twist消息 - “抓取物体” →
/gripper_command的SetGripperState消息 - “调整摄像头角度” →
/camera_angle的SetAngle消息
2. WebSocket 通信支持
ROS MCP Server 通过 WebSocket 协议与前端应用(如 Claude Desktop)进行通信,实现用户指令的实时传递与执行。其优势包括:
- 跨平台兼容性:支持 Linux、Windows 和 macOS,适用于多种开发环境。
- 低延迟通信:WebSocket 是一种轻量级的通信协议,适合实时控制场景。
- 易于集成:前端应用只需通过 WebSocket 连接到 MCP Server,即可实现对机器人的控制。
3. ROS/ROS2 通信支持
ROS MCP Server 支持与 ROS 1 和 ROS 2 的无缝集成,具体包括:
- ROS 1:通过
roslaunch rosbridge_server rosbridge_websocket.launch启动 ROSBRIDGE 服务。 - ROS 2:通过
ros2 launch rosbridge_server rosbridge_websocket_launch.xml启动 ROSBRIDGE 服务。 - 话题与服务交互:MCP Server 可以订阅或发布 ROS/ROS2 的话题(如
/cmd_vel、/sensor_msgs/Image等),并将其映射到 WebSocket 消息中。
4. 可扩展性
ROS MCP Server 提供了高度可扩展的架构,用户可以根据需要添加新的功能模块。例如:
- 扩展控制功能:通过修改
MCPFUNCTIONS.md文件,添加新的机器人控制指令。 - 扩展传感器接口:通过自定义插件,支持新的传感器数据格式(如
sensor_msgs/Image、geometry_msgs/Twist等)。 - 扩展 NLP 模型:通过集成不同的 LLM 模型,支持多种语言的指令解析。
四、应用场景
1. 机器人开发与调试
在机器人开发过程中,开发者通常需要通过命令行或脚本进行控制。ROS MCP Server 提供了一种更直观、更灵活的控制方式,使得开发者可以快速测试和调试机器人行为。
2. 人机交互界面开发
ROS MCP Server 可以与前端应用(如 Web 界面、移动应用)集成,实现自然语言交互的人机界面。例如,用户可以通过语音或文本输入指令,控制机器人完成特定任务。
3. 模拟环境中的机器人控制
在仿真环境中(如 NVIDIA Isaac Sim、Gazebo 等),ROS MCP Server 可以作为控制接口,实现对机器人模型的实时控制。例如,用户可以通过自然语言指令控制机械臂抓取物体、调整摄像头角度等。
4. 多机器人系统集成
ROS MCP Server 支持多机器人系统的集成,用户可以通过统一的控制界面管理多个机器人。例如,用户可以通过一个 Web 界面控制多个机械臂,实现协同作业。
五、快速使用
1. 安装依赖
在开始使用之前,需要安装以下依赖项:
- Python 3.8+
- uv(用于虚拟环境管理)
- rosbridge(用于 ROS/ROS2 通信)
安装 uv
curl -LsSf https://astral.sh/uv/install.sh | sh或者使用 pip:
pip install uv2. 创建虚拟环境(可选)
uv venvsource .venv/bin/activate3. 安装 ROS MCP Server
npx -y @smithery/cli install @lpigeon/ros-mcp-server --client claude4. 配置 MCP Server
在 mcp.json 文件中配置 ROS MCP Server 的参数,例如:
{ \"mcpServers\": { \"ros-mcp-server\": { \"command\": \"uv\", \"args\": [ \"--directory\", \"/ABSOLUTE/PATH/TO/PARENT/FOLDER/ros-mcp-server\", \"run\", \"server.py\" ] } }}5. 启动 ROSBRIDGE 服务
根据使用的 ROS 版本启动 ROSBRIDGE 服务:
- ROS 1:
roslaunch rosbridge_server rosbridge_websocket.launch- ROS 2:
ros2 launch rosbridge_server rosbridge_websocket_launch.xml6. 配置前端应用(如 Claude Desktop)
在 Claude Desktop 中,找到 mcp.json 文件并配置 ROS MCP Server 的连接参数。例如:
- ROSBRIDGE_IP:ROSBRIDGE 服务的 IP 地址
- ROSBRIDGE_PORT:ROSBRIDGE 服务的端口号(默认为 9090)
7. 测试控制指令
在前端应用中输入自然语言指令(如“前进”、“停止”、“抓取物体”等),观察机器人是否能够正确响应。
六、结语
ROS MCP Server 是一个功能强大、易于集成的跨平台机器人控制框架,它通过自然语言处理技术,将用户指令转化为 ROS/ROS2 的控制命令,为机器人系统提供了更直观、更灵活的交互方式。无论你是机器人开发者、AI 研究者,还是前端工程师,都可以通过 ROS MCP Server 快速实现人机交互的控制功能。
GitHub 项目地址:https://github.com/lpigeon/ros

🎯🔖更多专栏系列文章:AI大模型提示工程完全指南、AI大模型探索之路(零基础入门)、AI大模型预训练微调进阶、AI大模型开源精选实践、AI大模型RAG应用探索实践🔥🔥🔥 其他专栏可以查看博客主页📑
😎 作者介绍:资深程序老猿,从业10年+、互联网系统架构师,目前专注于AIGC的探索(CSDN博客之星|AIGC领域优质创作者)
📖专属社群:欢迎关注【小兵的AI视界】公众号或扫描下方👇二维码,回复‘入群’ 即刻上车,获取邀请链接。
💘领取三大专属福利:1️⃣免费赠送AI+编程📚500本,2️⃣AI技术教程副业资料1套,3️⃣DeepSeek资料教程1套🔥(限前500人)
如果文章内容对您有所触动,别忘了点赞、⭐关注,收藏!加入我们,一起携手同行AI的探索之旅,开启智能时代的大门!


