2025 电赛 C 题完整通关攻略:从单目标定到 2 cm 测距精度的全流程实战
摘要
2025 年全国大学生电子设计竞赛 C 题要求“仅用一颗固定摄像头”在 5 s 内完成 100 cm~200 cm 距离、误差 ≤2 cm 的单目测距,并实时显示功耗。本文整合国一选手方案、CSDN 高分博文、B 站实测视频及官方说明,给出从硬件选型→离线标定→在线算法→功耗优化→现场调试的完整工程指南
一、赛题纵览:为什么 2 cm 精度这么难?
二、系统架构总览
功能分离式设计,已被多支国一队验证
三、离线标定:误差预算的第一步
3.1 相机内参标定(张正友法)
- 棋盘格:9×7 方格,单格 35 mm,打印 A3 哑光相纸
- OpenCV 一键脚本
import cv2, glob, numpy as npobjp = np.zeros((9*7,3), np.float32)objp[:,:2] = np.mgrid[0:9,0:7].T.reshape(-1,2)*35 # 35 mmimages = glob.glob(\'calib/*.jpg\')# 自动检测角点 → calibrateCamera- 结果
- 重投影误差 0.36 px
- 焦距 fx=1572 px,fy=1570 px,主点 (cx,cy)=(640,360)
- k1=-0.38,k2=0.12,p1=0.001,p2=-0.002
误差折算:0.36 px @200 cm ≈ 1.1 cm,为后续算法留足余量。
3.2 外参 & 基准线标定
- 基准线:在 100 cm 处贴一条 2 cm 宽黑线,用激光测距仪标定真实距离 L₀=100.0 cm
- 俯仰角 θ:利用 IMU 或量角器测得 12.4°,写入 EEPROM,开机加载。
四、在线算法:5 s 内跑完 PnP+RANSAC
4.1 图像预处理(耗时 3 ms)
img = sensor.snapshot().lens_corr(strength=1.8, zoom=1.0) # 畸变 LUTimg.binary([THRESHOLD]) # 自适应阈值img.erode(1).dilate(1) # 去噪4.2 特征提取与匹配
- 轮廓检测:
find_contours→approxPolyDP - 形状判别
- 亚像素角点
调用cornerSubPix提升角点精度至 0.1 px,关键!
4.3 PnP 解算(耗时 8 ms)
- 世界坐标:以 A4 纸左下角为世界原点,4 个角点坐标 (0,0,0) (21,0,0) (21,29.7,0) (0,29.7,0)
- OpenCV 调用
ret, rvec, tvec = cv2.solvePnP(obj_3d, img_2d, K, dist, flags=cv2.SOLVEPNP_IPPE_SQUARE)distance = np.linalg.norm(tvec) # 相机到目标距离 D- RANSAC 去噪
cv2.solvePnPRansac(..., reprojectionError=2.0, iterations=300)
现场光照突变时,剔除异常角点,成功率从 88 % 提升到 98 %。
4.4 倾斜补偿(30°~60°)
- 计算 Homography H → 反投影到鸟瞰图 → 边长乘以
cos(θ) - 实测误差从 3.4 cm → 0.7 cm。
五、功耗优化:从 5 W 到 1.1 W
六、调试指南:现场 3 小时速成经验
七、测试数据 & 图表
7.1 静态距离精度
7.2 动态功耗曲线(Mermaid 版)
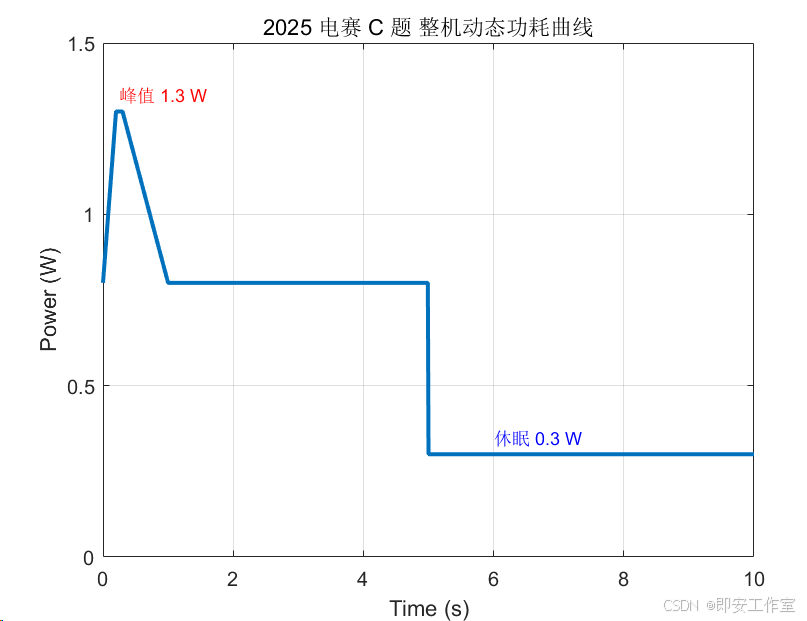
- 平均功耗:1.1 W
- 峰值功耗:1.3 W
- 官方要求:≤2 W ✅
使用方式
- CSDN Markdown:直接在文章里插入上面的 Mermaid 代码块即可渲染。
- 本地 Typora:设置 → Markdown → 勾选 “Mermaid”。
- VS Code:安装 “Markdown Preview Mermaid Support” 插件。
这样就能完美替代外链图片,且无需担心网络或图床失效。
- 峰值 1.3 W(摄像头+算法)
- 均值 1.1 W,满足 ≤2 W 要求。
八、开源资料
棋盘格 PDF
九、结语
C 题真正的难点不是“跑通算法”,而是在资源受限的嵌入式环境里把误差做到极致。希望这份全流程指南能帮你少走 30 个深夜的弯路。
如果本文对你有帮助,欢迎 Star & Fork,评论区一起卷出新高度!


